一种机器人关节装配调试装置的制作方法
本技术涉及机器人装配调试,具体为一种机器人关节装配调试装置。
背景技术:
1、机器人是一种自动化机器,不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器,机器人可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率质量,服务人类生活,扩大延伸人的活动及能力范围;
2、其中机器人生产过程中,对于机器人关节部位会使用到调试装置对机器人关节进行动作疲劳测试,以便检测和调试机器人的关节部位是否达到所需生产的装配标准。
3、但是现有技术在实际使用时,在使用调试装置对机器人关节部位进行测试过程中,通常都是对机器人关节部位做转动式的疲劳测试,在进行转动式疲劳测试时,相对摆动幅度较大不适用扇形摆动机器人关节部分,从而当遇到扇形摆动机器人关节部位时,缺乏一种专门针对扇形摆动机器人关节部位的小幅度扇形摆动疲劳测试。
技术实现思路
1、本实用新型的目的在于提供一种机器人关节装配调试装置,以解决上述背景技术中提出的在使用调试装置对机器人关节部位进行测试过程中,通常都是对机器人关节部位做转动式的疲劳测试,在进行转动式疲劳测试时,相对摆动幅度较大不适用扇形摆动机器人关节部分,从而当遇到扇形摆动机器人关节部位时,缺乏一种专门针对扇形摆动机器人关节部位的小幅度扇形摆动疲劳测试问题。
2、为实现上述目的,本实用新型提供如下技术方案:包括:
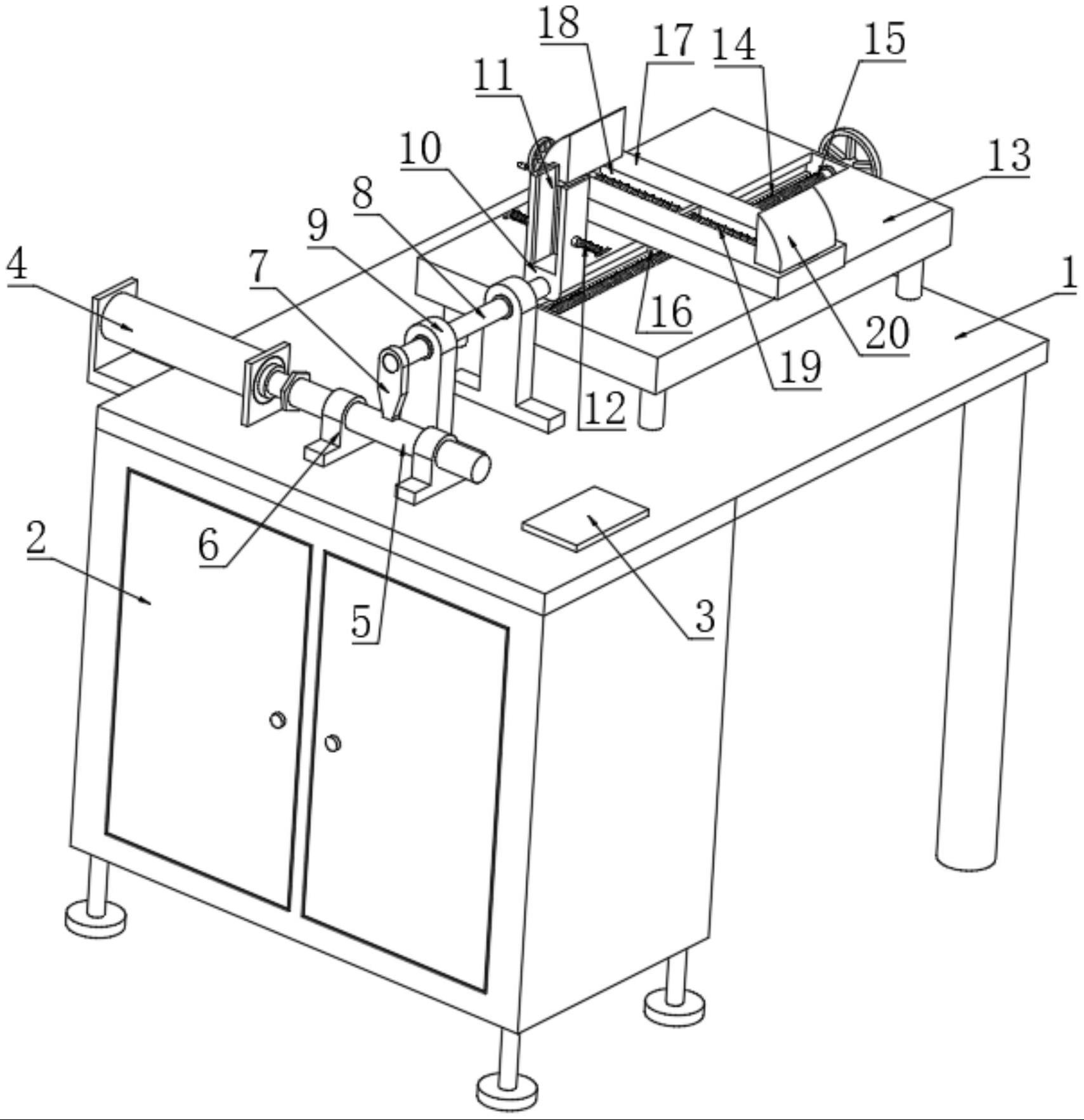
3、摆动测试组件,所述摆动测试组件包括测试平台,所述测试平台下端面前侧固定连接有调试控制柜,所述测试平台上端面前侧边固定安装设置有数字显示器,所述测试平台上端面外侧边固定安装设置有电动伸缩杆,所述电动伸缩杆侧顶端伸缩部分螺纹连接有伸缩柱,所述伸缩柱中部上端外曲面固定连接有摆动块,所述摆动块上端后侧面固定连接有转动柱,所述转动柱后顶端固定连接有摆动架,所述摆动架内壁两侧贴合活动连接有夹持板,所述夹持板外侧端中部通过转轴转动连接有夹持螺杆;
4、固定夹持组件,所述固定夹持组件包括测试平台上端面后侧固定连接的固定台,所述固定台上端面中部开始有第一限位直滑槽,所述第一限位直滑槽内壁前后侧通过转轴转动连接有第一丝杆,所述第一丝杆中部外曲面螺纹连接有第一滑块,所述第一滑块上端面固定连接有夹持台,所述夹持台中部开始有第二直滑槽,所述第二直滑槽内壁两侧端通过转轴转动连接有第二丝杆,所述第二丝杆两侧端外曲面螺纹连接有夹持座
5、优选的,所述调试控制柜内部固定安装设置有计数模块,所述测试平台下端面后侧固定连接有支撑腿。
6、优选的,所述数字显示器通过导线与调试控制柜电性连接,所述电动伸缩杆通过导线与调试控制柜电性连接。
7、优选的,所述伸缩柱两侧外曲面调节有滑动支撑环,且滑动支撑环数量有两个,分别以所述伸缩柱两侧外曲面对称分布,所述滑动支撑环下顶端固定安装设置在测试平台上端面前侧。
8、优选的,所述转动柱前后端外曲面通过转轴转动连接有转动支撑架,且转动支撑架数量有两个,分别以所述转动柱前后端外曲面对称分布。
9、优选的,所述夹持板数量有两个,分别以所述摆动架内壁两侧对称分布,所述夹持螺杆贯穿螺纹连接在摆动架两侧外壁。
10、优选的,所述第二丝杆两侧外曲面螺纹朝向相反,所述夹持板和夹持座内侧面分别固定连接有橡胶防滑垫,所述第一丝杆和第二丝杆外顶端分别固定安装设置有转把。
11、与现有技术相比,本实用新型的有益效果是:
12、1、本实用新型通过将所需测试的扇形摆动机器人关节固定部分放置在第一滑块上端面焊接的夹持台上端面,当扇形摆动机器人关节固定部分放置在夹持台上端面时,通过转动第二直滑槽内壁两侧端通过转轴转动连接的第二丝杆,当第二丝杆转动时,会带动第二丝杆两侧端外曲面螺纹连接的夹持座,因与第二丝杆两侧端外曲面螺纹连接的作用力带动夹持座进行移动,且第二丝杆两侧外曲面螺纹朝向相反,从而当夹持座移动时,会同步向内移动对扇形摆动机器人关节固定部分进行固定夹持,当扇形摆动机器人关节固定部分固定夹持时,通过转动第一限位直滑槽内壁前后侧通过转轴转动连接的第一丝杆,当第一丝杆转动时,会带动第一丝杆中部外曲面螺纹连接的第一滑块,因与第一丝杆中部外曲面螺纹连接的作用力前后移动,当第一滑块前后移动时,会带动夹持台前后移动,当夹持台前后移动时,会带动被夹持座夹持的扇形摆动机器人关节固定部分进行前后移动调节,从而起到了对机器人关节固定部分进行夹持的同时,可以前后移动调节扇形摆动机器人关节固定部分的位置;
13、2、本实用新型同时还当扇形摆动机器人关节固定部分被夹持固定时,通过将扇形摆动机器人关节摆动部分放置在转动柱后顶端焊接的摆动架内壁,当扇形摆动机器人关节摆动部分放置在摆动架内壁后,通过转动夹持板外侧端中部通过转轴转动连接的夹持螺杆,当夹持螺杆转动时,会因与摆动架两侧外壁贯穿螺纹连接的作用力向内侧移动,当夹持螺杆向内侧移动时,会推动摆动架内壁两侧贴合活动连接的夹持板对扇形摆动机器人关节摆动部分进行夹持固定,当扇形摆动机器人关节摆动部分夹持固定时,通过控制开启测试平台上端面外侧边固定安装设置的电动伸缩杆进伸缩,当电动伸缩杆进伸缩时,会依次带动转动柱后顶端焊接的摆动架进行左右摆动,当摆动架左右摆动时,会带动夹持板内部固定夹持的扇形摆动机器人关节摆动部分进行摆动,同时电动伸缩杆进行伸缩时,通过调试控制柜内部固定安装设置的计数模块,可以对电动伸缩杆的伸缩次数进行计数,并通过测试平台上端面前侧边固定安装设置的数字显示器进行显示,从而实现了对扇形摆动机器人关节进行小幅度扇形摆动疲劳测试的作用,避免了对扇形摆动机器人关节进行疲劳测试时,摆动幅度较大导致扇形摆动机器人关节损伤的问题。
技术特征:
1.一种机器人关节装配调试装置,其特征在于:包括:
2.根据权利要求1所述的一种机器人关节装配调试装置,其特征在于:所述调试控制柜(2)内部固定安装设置有计数模块,所述测试平台(1)下端面后侧固定连接有支撑腿。
3.根据权利要求1所述的一种机器人关节装配调试装置,其特征在于:所述数字显示器(3)通过导线与调试控制柜(2)电性连接,所述电动伸缩杆(4)通过导线与调试控制柜(2)电性连接。
4.根据权利要求1所述的一种机器人关节装配调试装置,其特征在于:所述伸缩柱(5)两侧外曲面调节有滑动支撑环(6),且滑动支撑环(6)数量有两个,分别以所述伸缩柱(5)两侧外曲面对称分布,所述滑动支撑环(6)下顶端固定安装设置在测试平台(1)上端面前侧。
5.根据权利要求1所述的一种机器人关节装配调试装置,其特征在于:所述转动柱(8)前后端外曲面通过转轴转动连接有转动支撑架(9),且转动支撑架(9)数量有两个,分别以所述转动柱(8)前后端外曲面对称分布。
6.根据权利要求1所述的一种机器人关节装配调试装置,其特征在于:所述夹持板(11)数量有两个,分别以所述摆动架(10)内壁两侧对称分布,所述夹持螺杆(12)贯穿螺纹连接在摆动架(10)两侧外壁。
7.根据权利要求1所述的一种机器人关节装配调试装置,其特征在于:所述第二丝杆(19)两侧外曲面螺纹朝向相反,所述夹持板(11)和夹持座(20)内侧面分别固定连接有橡胶防滑垫,所述第一丝杆(15)和第二丝杆(19)外顶端分别固定安装设置有转把。
技术总结
本技术公开了一种机器人关节装配调试装置,包括测试平台,所述测试平台下端面前侧固定连接有调试控制柜,所述测试平台上端面前侧边固定安装设置有数字显示器,所述测试平台上端面外侧边固定安装设置有电动伸缩杆,所述电动伸缩杆侧顶端伸缩部分螺纹连接有伸缩柱,所述伸缩柱中部上端外曲面固定连接有摆动块,所述摆动块上端后侧面固定连接有转动柱,所述转动柱后顶端固定连接有摆动架,所述摆动架内壁两侧贴合活动连接有夹持板,所述夹持板外侧端中部通过转轴转动连接有夹持螺杆,包括测试平台上端面后侧固定连接的固定台。本技术实现了对扇形摆动机器人关节进行小幅度扇形摆动疲劳测试的作用。
技术研发人员:张良
受保护的技术使用者:安徽胜迪自动化科技有限公司
技术研发日:20230625
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!