一种夹持机械手的制作方法
本技术属于核酸采样,尤其是涉及一种夹持机械手。
背景技术:
1、在咽拭子操作过程中医务人员须与患者近距离接触,患者咳嗽、用力呼吸等可产生大量飞沫或气溶胶,具有较高交叉感染的风险。采用机器人代替人工进行核酸咽拭子采样,不仅避免交叉感染,还能够全天候进行采样。
2、核酸咽拭子采样机器人的机械手需要完成对采样签、试管等物品的抓取;因此,需要一种外形尺寸小,设计紧凑,能够在有限空间完成对采样签、试管等物品抓取的机械手。
技术实现思路
1、针对现有技术中的缺陷,本实用新型提供一种夹持机械手,用于解决现有技术中的夹持机械手往往外形尺寸过大,难以胜任有限空间中完成对采样签、试管等物品抓取要求的问题。
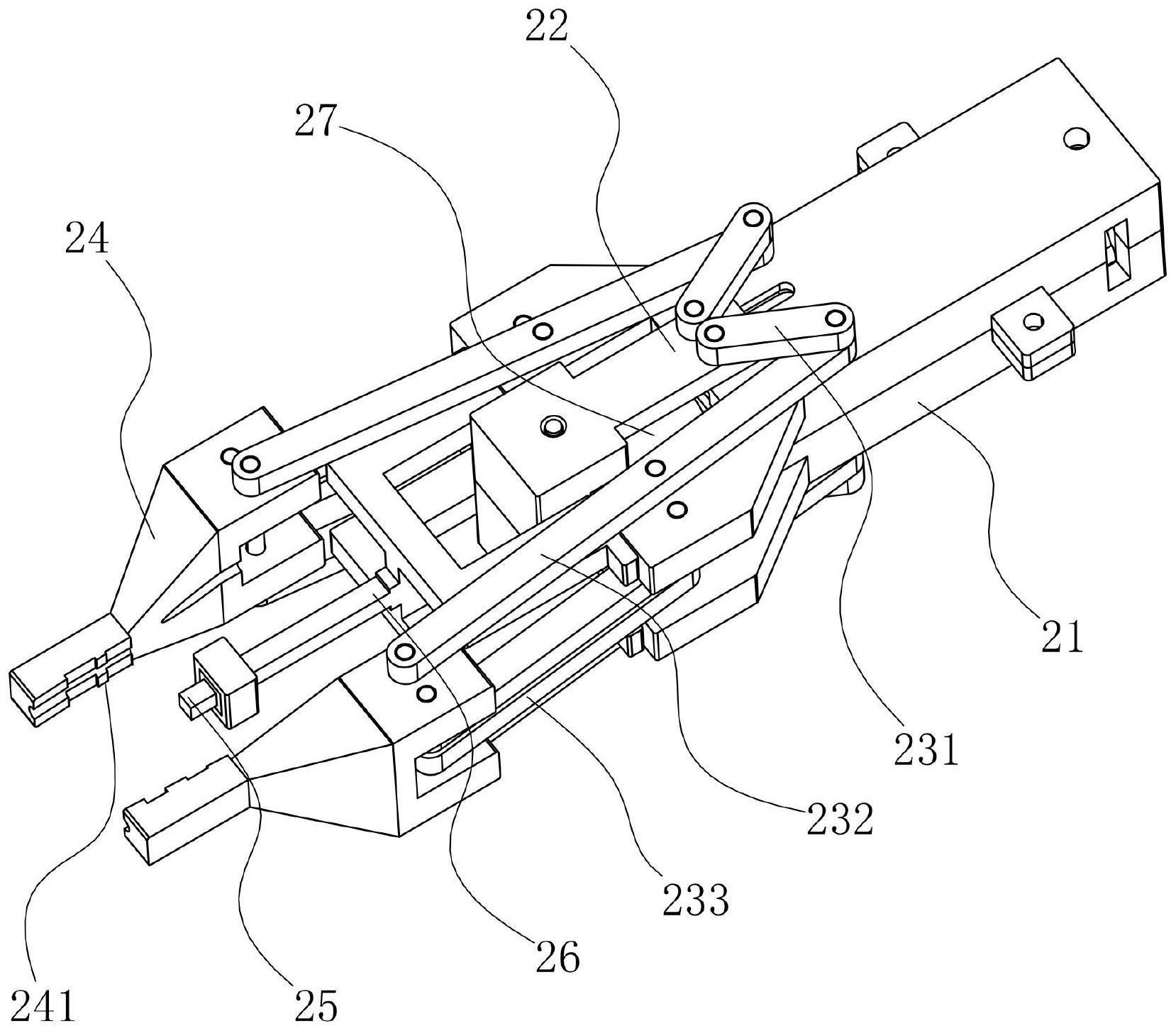
2、为了实现上述目的,本实用新型提供的一种夹持机械手,包括:壳体、直线驱动件、连接件、摆动组件和机械手指,所述直线驱动件固定安装在所述壳体内部,所述连接件和所述直线驱动件的活动端固定连接;所述摆动组件转动安装在所述壳体上,所述摆动组件和所述连接件铰接,两组所述摆动组件对称设置,两组所述摆动组件的摆动端均设有所述机械手指。
3、通过所述直线驱动件带动所述摆动组件摆动,两组所述摆动组件相对摆动过程中,带动两组机械手指相对运动从而实现夹持。结构紧凑,占用空间小,可靠性高;通过机械臂带动所述夹持机械手可以实现各种抓取动作,实现在有限空间中完成对采样签、试管等物品抓取要求。
4、可选地,所述摆动组件包括第一杆件、第二杆件和第三杆件,所述第一杆件一端和所述连接件铰接,所述第一杆件的另一端和所述第二杆件的一端铰接,所述第二杆件的另一端和所述机械手指铰接,所述第二杆件和所述壳体转动连接。
5、所述第三杆件的一端和所述壳体铰接,所述第三杆件的另一端和所述机械手指铰接,所述第三杆件和所述第二杆件平行,其中,所述第二杆件、所述第三杆件、所述机械手指和所述壳体形成四连杆机构。
6、由于所述第二杆件、所述第三杆件、所述机械手指和所述壳体形成四连杆机构,所述机械手指在摆动过程中,两组所述机械手指相对面在移动过程中始终平行,抓取物体的时候对所抓取的物体产生的作用力在一条直线上,不易损伤物体。
7、可选地,所述的夹持机械手还包括微动开关,所述微动开关布置在两组所述机械手指之间,所述微动开关通过连接支架和所述壳体固定连接。抓取物体时,更好的保护所述抓取的物体。
8、可选地,所述直线驱动件为气缸或者电动推杆,更节省空间,稳定可靠靠性。
9、可选地,每个所述机械手指两侧对称设置有两组所述摆动组件,增强所述机械手指的稳定性。
10、可选地,所述第二杆件和所述壳体通过转轴转动连接,结构简单,连接可靠。
11、可选地,所述机械手指上开设有防滑齿,防止抓取物体时打滑。
技术特征:
1.一种夹持机械手,其特征在于,包括:
2.根据权利要求1所述的夹持机械手,其特征在于:所述摆动组件包括第一杆件、第二杆件和第三杆件,
3.根据权利要求1所述的夹持机械手,其特征在于:还包括微动开关,所述微动开关布置在两组所述机械手指之间,所述微动开关通过连接支架和所述壳体固定连接。
4.根据权利要求1所述的夹持机械手,其特征在于:所述直线驱动件为气缸或者电动推杆。
5.根据权利要求1所述的夹持机械手,其特征在于:每个所述机械手指两侧对称设置有两组所述摆动组件。
6.根据权利要求2所述的夹持机械手,其特征在于:所述第二杆件和所述壳体通过转轴转动连接。
7.根据权利要求1-6任一所述的夹持机械手,其特征在于:所述机械手指上开设有防滑齿。
技术总结
本技术涉及一种夹持机械手,属于核酸采样技术领域,用于解决现有技术中的夹持机械手往往外形尺寸过大,难以胜任有限空间中完成对采样签、试管等物品抓取要求的问题;包括:壳体、直线驱动件、连接件、摆动组件和机械手指,所述直线驱动件固定安装在所述壳体内部,所述连接件和所述直线驱动件的活动端固定连接,两组所述摆动组件的摆动端均设有所述机械手指。通过所述直线驱动件带动所述摆动组件摆动,两组所述摆动组件相对摆动过程中,带动两组机械手指相对运动从而实现夹持。结构紧凑,占用空间小,可靠性高;通过机械臂带动所述夹持机械手可以实现各种抓取动作,实现在有限空间中完成对采样签、试管等物品抓取要求。
技术研发人员:吴亚军
受保护的技术使用者:巍然华创智能科技(北京)有限公司
技术研发日:20230626
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!