一种巡检机器人的制作方法
本技术涉及电抗器巡检,具体涉及一种巡检机器人。
背景技术:
1、干式电抗器多状态量巡检工作大多主要由人工的方式完成,使得巡检工作的效率较为低下,巡检人员劳动强度大,有时还会因设备之间的空间狭小,导致巡检工作不全面,进而会有漏检的情况发生。因此,当前急需一种体积小、运动灵活的巡检机器人来帮助现场人员完成复杂的巡检任务。
2、鉴于此,实有必要提供一种新型的巡检机器人以克服上述缺陷。
技术实现思路
1、本实用新型的目的是提供一种巡检机器人,减轻了巡检人员的劳动强度,提高了巡检效率。
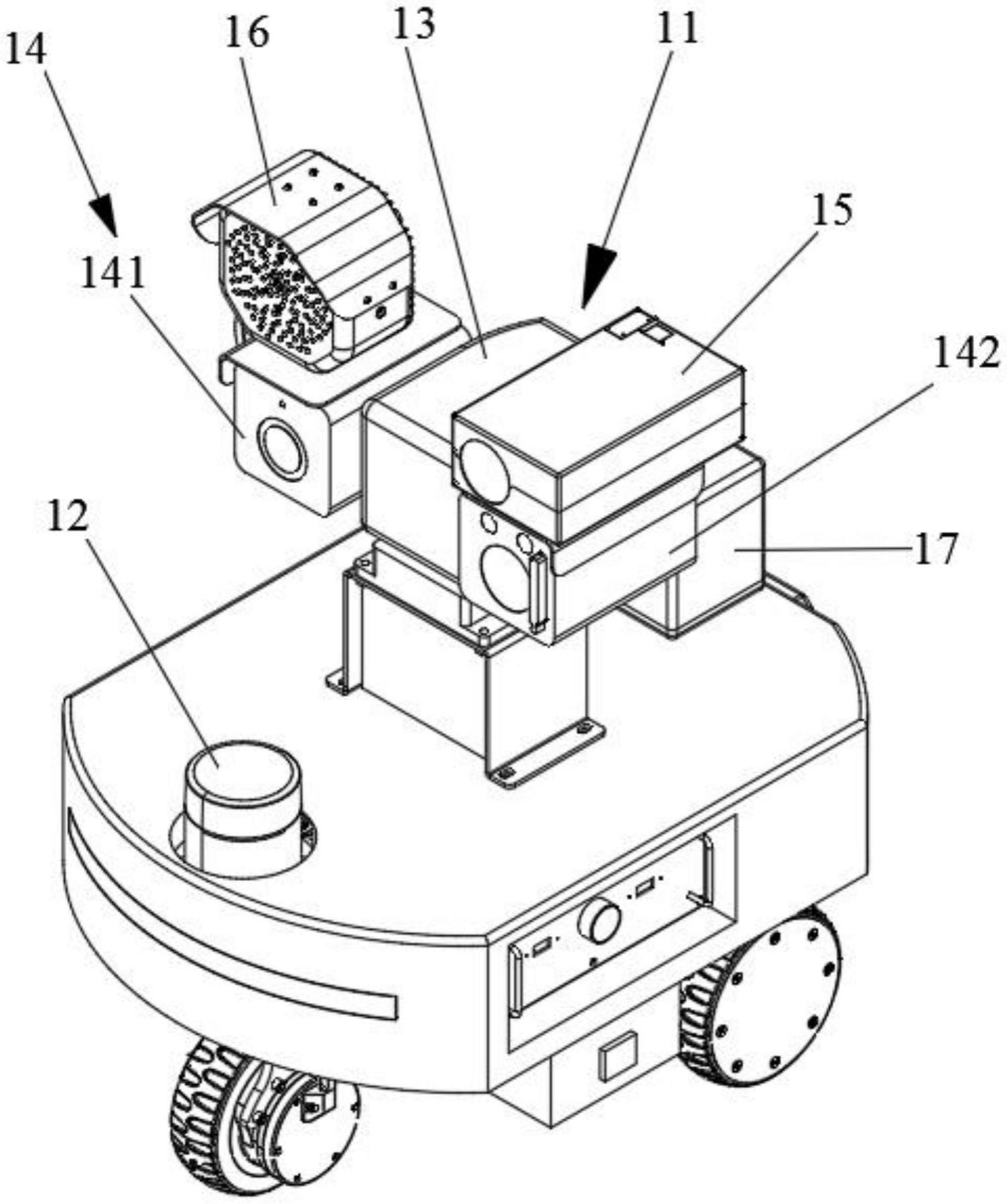
2、为了实现上述目的,本实用新型提供一种巡检机器人,包括:机器主体、检测云台以及导航雷达,所述检测云台包括安装在机器主体上的基座,所述基座上转动安装有图像生成装置,所述图像生成装置包括热成像摄像机和可见光摄像机,所述热成像摄像机和可见光摄像机分别转动安装于所述基座的两侧,所述巡检机器人通过导航雷达测定电器的位置后在巡检现场的电器周围行驶进行巡检。
3、优选的,所述基座上安装有紫外线检测元件,所述紫外线检测元件安装于所述可见光摄像机上。
4、优选的,所述基座上安装有声纹相机,所述声纹相机安装于所述热成像摄像机上。
5、优选的,所述检测云台还包括电磁辐射检测仪,所述电磁辐射检测仪安装于所述巡检机器人上。
6、优选的,所述机器主体的底部设置有三个舵轮,其中一个舵轮分布于机器主体的前端,剩余的两个舵轮分布于机器主体的尾端。
7、与现有技术相比,有益效果在于:1)通过巡检机器人在现场完成巡检现场,减轻了巡检人员的劳动强度,提高了巡检效率,并且整体体积较小,易于在狭小的空间内穿梭进行全面巡检,防止漏检的情况发生。
8、2)通过设置的三个舵轮的结构设计,可以实现全向运动,具有灵巧方便的特点。
9、3)通过检测云台上设置的激光雷达,在巡检机器人进行巡检工作时,可以测出巡检目标的距离、方位,可以使得巡检机器人能够精确定位巡检目标。
技术特征:
1.一种巡检机器人,其特征在于,包括:机器主体、检测云台(11)以及导航雷达(12),所述检测云台(11)包括安装在机器主体上的基座(13),所述基座(13)上转动安装有图像生成装置(14),所述图像生成装置(14)包括热成像摄像机(141)和可见光摄像机(142),所述热成像摄像机(141)和可见光摄像机(142)分别转动安装于所述基座(13)的两侧,所述巡检机器人(1)通过导航雷达(12)测定电器的位置后在巡检现场的电器周围行驶进行巡检。
2.如权利要求1所述的巡检机器人,其特征在于,所述基座(13)上安装有紫外线检测元件(15),所述紫外线检测元件(15)安装于所述可见光摄像机(142)上。
3.如权利要求1所述的巡检机器人,其特征在于,所述基座(13)上安装有声纹相机(16),所述声纹相机(16)安装于所述热成像摄像机(141)上。
4.如权利要求1所述的巡检机器人,其特征在于,所述检测云台(11)还包括电磁辐射检测仪(17),所述电磁辐射检测仪(17)安装于所述巡检机器人(1)上。
5.如权利要求1所述的巡检机器人,其特征在于,所述机器主体的底部设置有三个舵轮,其中一个舵轮分布于机器主体的前端,剩余的两个舵轮分布于机器主体的尾端。
技术总结
本技术公开了一种巡检机器人,包括:机器主体、检测云台以及导航雷达,所述检测云台包括安装在机器主体上的基座,所述基座上转动安装有图像生成装置,所述图像生成装置包括热成像摄像机和可见光摄像机,所述热成像摄像机和可见光摄像机分别转动安装于所述基座的两侧,所述巡检机器人通过导航雷达测定电器的位置后在巡检现场的电器周围行驶进行巡检。
技术研发人员:杨新,魏雷,刘爽
受保护的技术使用者:宁波华运智能科技有限公司
技术研发日:20230627
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!