一种稳定性高的工业机械臂的制作方法
本技术涉及工业机械臂,特别涉及一种稳定性高的工业机械臂。
背景技术:
1、工业机械臂是拟人手臂、手腕和手功能的机械电子装置,它可把任一物件或工具按空间位姿的时变要求进行移动,从而完成某一工业生产的作业要求。
2、目前公告为:cn218064291u的中国实用新型专利,公开了一种稳定性高的工业风扇,涉及工业风扇技术领域,此实用新型包括底座,底座的顶部两侧均设有支撑板,支撑板的顶部设有安装台,安装台的顶部两侧固定连接有固定支板,固定支板之间通过固定组件连接有风扇主体,底座与安装台之间设有支撑组件,固定组件包括连接块、卡块和固定杆,支撑组件包括丝杆、升降架、连接板和抵接板,此实用新型为一种稳定性高的工业风扇,通过设置的固定组件和支撑组件,能够使风扇主体的安装和拆卸比较方便,省时省力,方便后期的维修和清理,通过抵接板的支撑使整体更加稳定,同时通过行驶轮,能够方便装置的移动运输,提高一定的便利性,使工业风扇能够稳定输出,提高了装置的实用性。
3、该专利是通过双轴步进电机带动丝杆转动,带动升降架在丝杆上下降,升降架下降,使抵接板接触地面,并将整体支撑起来,来达到增加稳定性的,但是其在使用时其整个整体的力都是集中的丝杆上的,当丝杆受力过大时,双轴步进电机带动丝杆旋转将会更加困难,长时间来回使用会大幅减少丝杆的使用寿命。
技术实现思路
1、1.要解决的技术问题
2、本实用新型提供一种稳定性高的工业机械臂,旨在解决现有的一种稳定性高的工业机械臂使用时其整个整体的力都是集中的丝杆上的,当丝杆受力过大时,双轴步进电机带动丝杆旋转将会更加困难,长时间来回使用会大幅减少丝杆的使用寿命的问题。
3、2.技术方案
4、本实用新型是这样实现的,一种稳定性高的工业机械臂,包括机械臂本体,所述机械臂本体的下方设置有增加机械臂本体稳定性的稳定机构,所述稳定机构的内部时设置有便于安装机械臂本体的安装组件;
5、所述稳定机构包括支撑台、支撑柱、隔离板、支撑框、双轴步进电机、丝杆、移动块、支撑块、连接板、转动杆和支撑架,所述支撑台设置于机械臂本体的下方,所述支撑柱均匀分布于支撑台的底部,所述隔离板栓接于支撑柱的底部,所述支撑框栓接于支撑台的底部,所述双轴步进电机栓接于支撑框的内部,所述丝杆栓接于双轴步进电机的输出端,所述移动块螺纹连接于丝杆的外部,所述支撑块焊接于支撑台的底部两端,所述连接板铰接于移动块的底部,所述转动杆转动连接于连接板的一端,所述支撑架设置于转动杆的外部,所述转动杆与连接板转动连接,所述丝杆的一端贯穿支撑块且与支撑块转动连接。
6、为了对机械臂本体进行快速的拆装,作为本实用新型的一种稳定性高的工业机械臂优选的,所述安装组件包括存放槽、安装槽和安装板,所述存放槽开设于支撑台的顶部,所述安装槽均匀分布于存放槽的一侧壁上,所述安装板均匀分布于机械臂本体的外壁上,所述安装板与安装槽插接。
7、为了再次增加机械臂本体在支撑台内部的稳定性,作为本实用新型的一种稳定性高的工业机械臂优选的,所述支撑台的内部螺纹连接有螺杆,所述螺杆的一端贯穿安装板且与安装板螺纹连接。
8、为了便于旋转螺杆,作为本实用新型的一种稳定性高的工业机械臂优选的,所述螺杆的一端焊接有便于旋转螺杆的旋转部。
9、为了便于移动机械臂本体的万向轮,作为本实用新型的一种稳定性高的工业机械臂优选的,所述隔离板的底部栓接有四个便于移动机械臂本体的万向轮,四个所述的万向轮均与隔离板的底部栓接。
10、为了增加支撑架与地面之间的摩擦,作为本实用新型的一种稳定性高的工业机械臂优选的,所述支撑架的底部粘接有增加支撑架与地面之间摩擦的橡胶垫。
11、为了防止人工与丝杆接触,作为本实用新型的一种稳定性高的工业机械臂优选的,所述支撑块的外部螺纹连接有防止人工与丝杆接触的保护壳。
12、3.有益效果
13、与现有技术相比,本实用新型的有益效果是:
14、该稳定性高的工业机械臂,通过设置机械臂本体、稳定机构、安装组件、支撑台、支撑柱、隔离板、支撑框、双轴步进电机、丝杆、移动块、支撑块、连接板、转动杆和支撑架,在使用时双轴步进电机带动丝杆旋转,因为移动块与丝杆螺纹连接,所以移动块将会向一侧移动,移动块移动时连接板、转动杆和支撑架配合使用,会使支撑架下降,接着支撑架的底部与地面接触,从而使稳定机构的整体被支撑起来,能够有效的增加该设备整体的稳定性,安装组件能够对机械臂本体进行快速的拆装,防止机械臂本体轻易的脱离稳定机构,再次增加了稳定性。
技术特征:
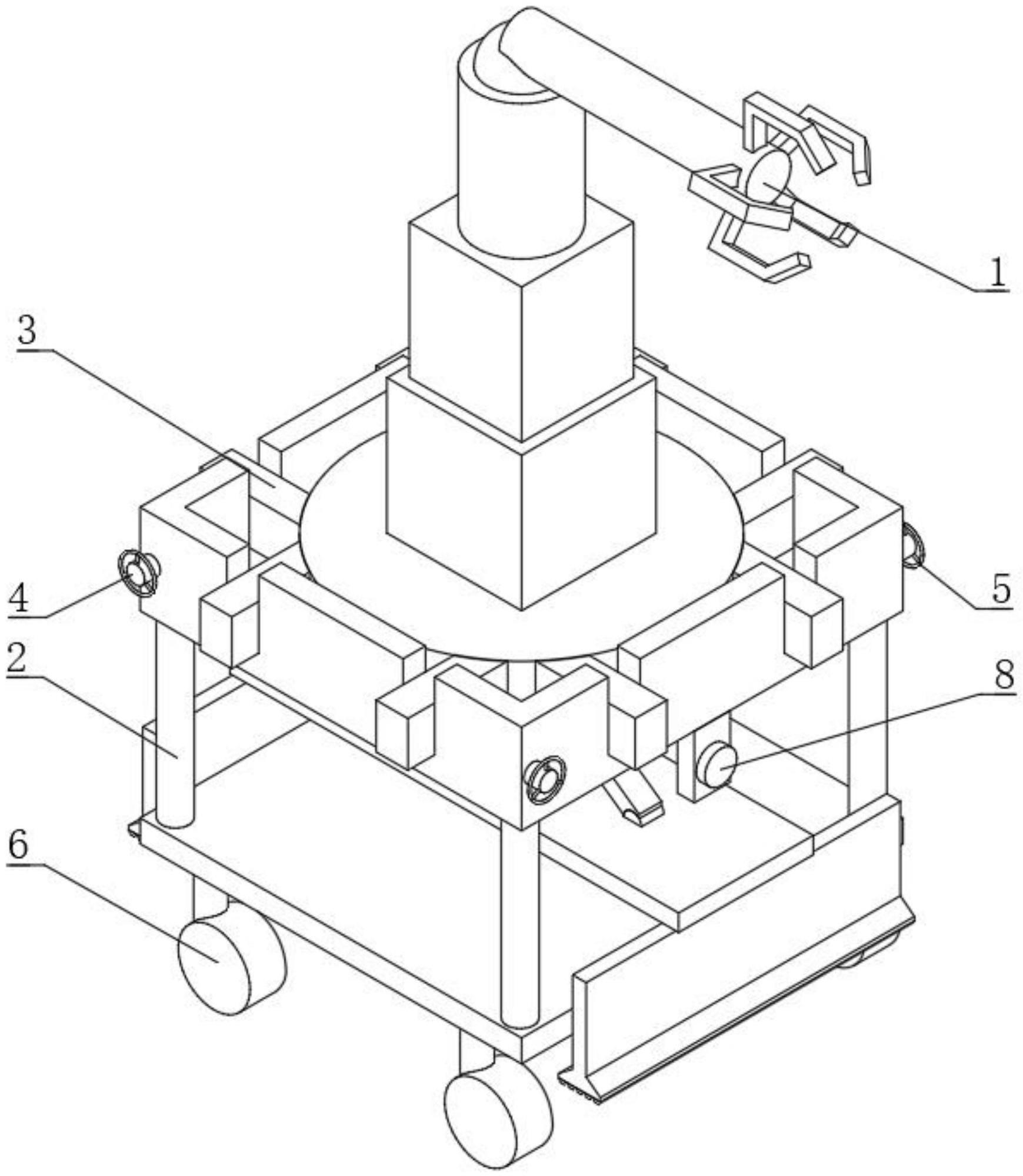
1.一种稳定性高的工业机械臂,包括机械臂本体(1),其特征在于:所述机械臂本体(1)的下方设置有增加机械臂本体(1)稳定性的稳定机构(2),所述稳定机构(2)的内部时设置有便于安装机械臂本体(1)的安装组件(3);
2.根据权利要求1所述的一种稳定性高的工业机械臂,其特征在于:所述安装组件(3)包括存放槽(301)、安装槽(302)和安装板(303),所述存放槽(301)开设于支撑台(201)的顶部,所述安装槽(302)均匀分布于存放槽(301)的一侧壁上,所述安装板(303)均匀分布于机械臂本体(1)的外壁上,所述安装板(303)与安装槽(302)插接。
3.根据权利要求2所述的一种稳定性高的工业机械臂,其特征在于:所述支撑台(201)的内部螺纹连接有螺杆(4),所述螺杆(4)的一端贯穿安装板(303)且与安装板(303)螺纹连接。
4.根据权利要求3所述的一种稳定性高的工业机械臂,其特征在于:所述螺杆(4)的一端焊接有便于旋转螺杆(4)的旋转部(5)。
5.根据权利要求1所述的一种稳定性高的工业机械臂,其特征在于:所述隔离板(203)的底部栓接有四个便于移动机械臂本体(1)的万向轮(6),四个所述的万向轮(6)均与隔离板(203)的底部栓接。
6.根据权利要求1所述的一种稳定性高的工业机械臂,其特征在于:所述支撑架(211)的底部粘接有增加支撑架(211)与地面之间摩擦的橡胶垫(7)。
7.根据权利要求1所述的一种稳定性高的工业机械臂,其特征在于:所述支撑块(208)的外部螺纹连接有防止人工与丝杆(206)接触的保护壳(8)。
技术总结
本技术公开了一种稳定性高的工业机械臂,属于工业机械臂技术领域,其技术方案要点包括机械臂本体,所述机械臂本体的下方设置有增加机械臂本体稳定性的稳定机构,所述稳定机构的内部时设置有便于安装机械臂本体的安装组件,在使用时双轴步进电机带动丝杆旋转,因为移动块与丝杆螺纹连接,所以移动块将会向一侧移动,移动块移动时连接板、转动杆和支撑架配合使用,会使支撑架下降,接着支撑架的底部与地面接触,从而使稳定机构的整体被支撑起来,能够有效的增加该设备整体的稳定性,安装组件能够对机械臂本体进行快速的拆装,防止机械臂本体轻易的脱离稳定机构,再次增加了稳定性。
技术研发人员:孙兴国,李宁,孙宏伟
受保护的技术使用者:天津海拓自动化科技有限公司
技术研发日:20230703
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!