大型风力发电机自动巡检机器人系统的制作方法
本技术涉及风力发电机巡检,具体为大型风力发电机自动巡检机器人系统。
背景技术:
1、风力发电机的叶片是大型设备,在长时间旋转过程中容易出现裂纹以及涂层脱落的情况,叶片作为高空工作的设备,一般经常需要巡检机器人在叶片内部进行检查,传统巡检机器人可以通过在叶片内部移动对叶片内壁进行录像,并把图像发射给后端接收设备,方便人们观察叶片内部是否有裂纹以及涂层是否脱落。
2、专利文件中的一种风电机组叶片内部巡检机器人存在的缺陷是:
3、1、专利文件cn217270621u公开了大型风力发电机自动巡检机器人系统,“包括壳体(3),在该壳体(3)两侧各自安装有一个结构支架(6),在每个结构支架(6)外表面上安装有2个麦克纳姆轮(2),该麦克纳姆轮(2)分别通过传动机构与该结构支架(6)内的驱动电机传动连接,在该壳体(3)的上表面固定安装有双自由度云台(1),在该双自由度云台(1)上分别安装有白光摄像头、红外摄像头、tof测距模块和超声波探伤模块,该驱动电机、白光摄像头、红外摄像头、tof测距模块和超声波探伤模块分别与安装在所述壳体(3)内的控制器连接,还包括供电电源。采用本实用新型的机器人后,可以实现对风力发电机组叶片巡视检查,”该专利中的巡检机器人可以对叶片内部进行拍摄,并把图像发射给后端接收设备,但是无法调节摄像头的高度,不便于对不同高度的叶片内壁进行近距离的拍摄,因此需要一种能够调节摄像头高度的大型风力发电机自动巡检机器人系统来解决该问题。
技术实现思路
1、本申请的一个目的在于提供大型风力发电机自动巡检机器人系统,能够解决现有技术中风力发电机自动巡检机器人无法调节摄像头高度的技术问题。
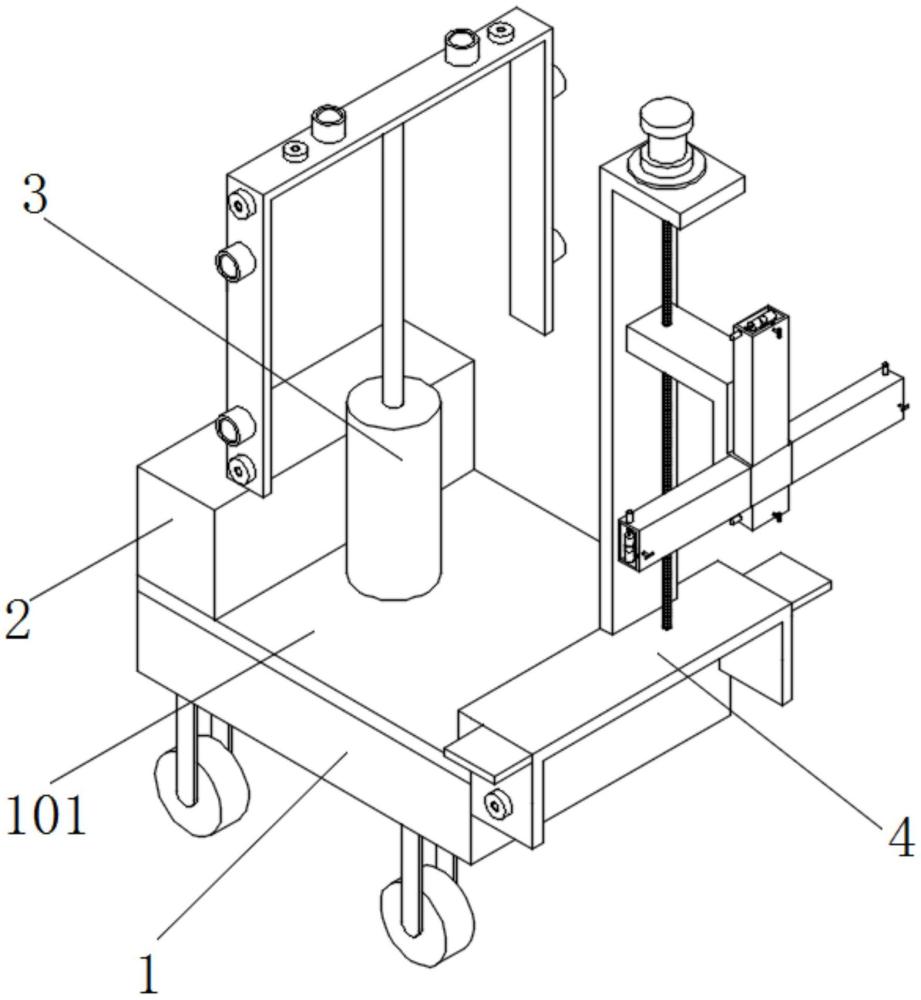
2、为实现上述目的,本实用新型提供如下技术方案:大型风力发电机自动巡检机器人系统,包括遥控车、第一气缸和第一安装框,所述遥控车的底部安装有第一安装板,所述第一安装板的顶部安装有第一气缸,所述第一气缸的输出端安装有升降框,所述升降框的外侧安装有多个第一摄像头;
3、所述第一安装板的顶部安装有第一安装框,所述第一安装框的顶部安装有第二安装板,所述第二安装板的顶部安装有驱动电机,所述驱动电机的输出端安装有第一螺纹杆,所述第一螺纹杆的外侧安装有升降杆。
4、优选的,所述第一安装板的顶部安装有安装盒,安装盒的内部安装有电池,安装盒的内部安装有控制器,安装盒的内部安装有通信器。
5、优选的,所述升降框的外侧安装有多个第一照明灯。
6、优选的,所述第一安装框的两侧对称安装有挡板,第一安装框的两侧对称安装有第二摄像头,且第二摄像头位于挡板的下方,第一安装框的顶部内壁对称安装有第三摄像头,第一安装框的顶部内壁对称安装有第二照明灯。
7、优选的,所述升降杆的外侧对称安装有第二安装框,第二安装框的一侧贯穿安装有第二螺纹杆,第二安装框的内部活动安装有油漆喷罐。
8、优选的,所述第二安装框的正面贯穿活动安装有移动杆,移动杆的一端安装有固定环。
9、优选的,所述第二安装框的顶部安装有第二气缸,第二气缸的输出端安装有压板。
10、与现有技术相比,本实用新型的有益效果是:
11、1、本实用新型通过将该设备放置在风力发电机叶片的内部,遥控车在叶片内部移动,通过第一摄像头、第二摄像头和第三摄像头对叶片内壁进行拍摄,并且通过通信器将拍摄的图形发射给后端接收设备,方便工作人员查看叶片内部是否有裂纹以及涂层是否有脱落的地方,通过启动第一气缸能够带动升降框上下移动,从而使第一摄像头能够上下移动,使第一摄像头可以对不同高度的叶片内壁进行更近距离的查拍摄,使拍摄的图像更加清楚,使大型风力发电机自动巡检机器人系统通过启动第一气缸能够带动升降框上下移动,从而使第一摄像头能够上下移动,使第一摄像头可以对不同高度的叶片内壁进行更近距离的查拍摄,使拍摄的图像更加清楚。
12、2、本实用新型当观察到叶片内壁有涂层脱落的部分时,通过启动驱动电机带动升降杆上下移动可以使油漆喷罐上下移动,接着第二气缸带动压板移动对油漆喷罐的头部进行按压,从而使油漆喷罐喷出油漆,喷出的油漆落在叶片内壁上,从而可以对涂层脱落的部分重新覆盖上油漆,油漆喷罐随着升降杆上下移动可以对不同高度的叶片内壁进行喷涂油漆,使大型风力发电机自动巡检机器人系统中油漆喷罐随着升降杆上下移动可以对不同高度的叶片内壁进行喷涂油漆。
技术特征:
1.大型风力发电机自动巡检机器人系统,包括遥控车(1)、第一气缸(3)和第一安装框(4),其特征在于:所述遥控车(1)的底部安装有第一安装板(101),所述第一安装板(101)的顶部安装有第一气缸(3),所述第一气缸(3)的输出端安装有升降框(301),所述升降框(301)的外侧安装有多个第一摄像头(302);
2.根据权利要求1所述的大型风力发电机自动巡检机器人系统,其特征在于:所述第一安装板(101)的顶部安装有安装盒(2),安装盒(2)的内部安装有电池(201),安装盒(2)的内部安装有控制器(202),安装盒(2)的内部安装有通信器(203)。
3.根据权利要求1所述的大型风力发电机自动巡检机器人系统,其特征在于:所述升降框(301)的外侧安装有多个第一照明灯(303)。
4.根据权利要求1所述的大型风力发电机自动巡检机器人系统,其特征在于:所述第一安装框(4)的两侧对称安装有挡板(401),第一安装框(4)的两侧对称安装有第二摄像头(402),且第二摄像头(402)位于挡板(401)的下方,第一安装框(4)的顶部内壁对称安装有第三摄像头(403),第一安装框(4)的顶部内壁对称安装有第二照明灯(404)。
5.根据权利要求1所述的大型风力发电机自动巡检机器人系统,其特征在于:所述升降杆(6)的外侧对称安装有第二安装框(601),第二安装框(601)的一侧贯穿安装有第二螺纹杆(602),第二安装框(601)的内部活动安装有油漆喷罐(603)。
6.根据权利要求5所述的大型风力发电机自动巡检机器人系统,其特征在于:所述第二安装框(601)的正面贯穿活动安装有移动杆(7),移动杆(7)的一端安装有固定环(701)。
7.根据权利要求5所述的大型风力发电机自动巡检机器人系统,其特征在于:所述第二安装框(601)的顶部安装有第二气缸(8),第二气缸(8)的输出端安装有压板(801)。
技术总结
本技术公开了大型风力发电机自动巡检机器人系统,包括遥控车、第一气缸和第一安装框,所述遥控车的底部安装有第一安装板,所述第一安装板的顶部安装有第一气缸,所述第一气缸的输出端安装有升降框,所述升降框的外侧安装有多个第一摄像头,所述第一安装框的顶部安装有第二安装板,所述第二安装板的顶部安装有驱动电机。本技术第一摄像头、第二摄像头和第三摄像头对叶片内壁进行拍摄,并且通过通信器将拍摄的图形发射给后端接收设备,方便工作人员查看叶片内部是否有裂纹以及涂层是否有脱落的地方,通过启动第一气缸能够带动第一摄像头能够上下移动,使第一摄像头可以对不同高度的叶片内壁进行更近距离的查拍摄,使拍摄的图像更加清楚。
技术研发人员:孙淑云,包伟钢,包伟娜,卢亦心
受保护的技术使用者:内蒙古金原农牧科技有限公司
技术研发日:20230705
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!