一种机械手
本技术涉及夹持设备的,具体而言,涉及一种机械手。
背景技术:
1、机械手作为机器人的末端执行器,需要在有限的空间内集成机械结构、驱动器、电气系统于一体。
2、公告号为cn204546551u的中国实用新型专利公开了一种机械抓手,包括气缸,所述气缸连有气缸轴,该气缸轴外套设有固定座,所述固定座背离气缸一面的边缘上活动安装有若干连杆手指;所述气缸轴端部安装有连接盘,该连接盘上活动安装有连杆,该连杆的另一端与连杆手指活动相连。将气缸的直线运动转变为连杆手指的转动,达到夹取物料目的。
3、然而上述机械手由于采用气缸来进行驱动,多个连杆手指手气缸驱动后,连杆手指形成的夹持空间是固定大小的,当被夹持物品的外径过大时,夹持力过大会损坏物品;当被夹持物品的外径过小时,物品可能从夹持空间滑落。上述机械手的夹持适用范围小,不利于推广使用。
技术实现思路
1、基于此,为了解决上述机械手的夹持适用范围小,不利于推广使用的问题,本实用新型提供了一种机械手,其具体技术方案如下:
2、一种机械手,包括:
3、安装基座;
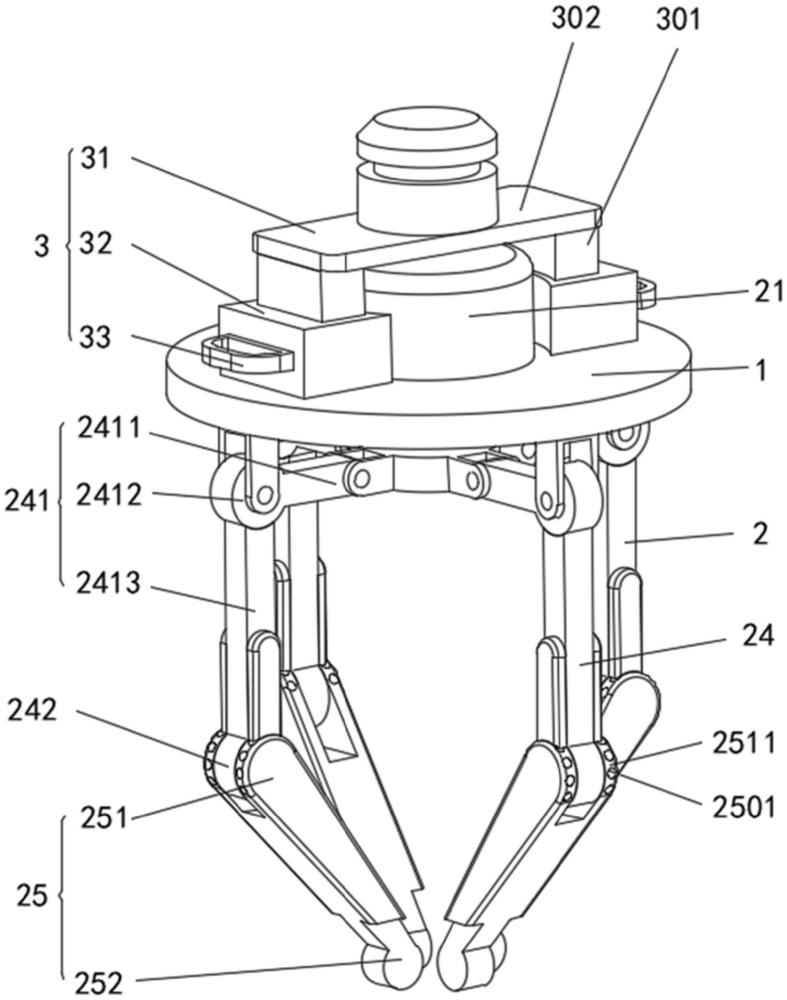
4、夹持组件,包括驱动件和至少三组手指组,所述手指组包括连接组和夹持手指,所述连接组包括连接件和套轴;所述连接件设有连接部、铰接部和卡位端,所述连接部用于与所述驱动件连接,所述铰接部用于与所述安装基座连接;所述套轴包括套接端和连接端,所述连接件的卡位端上设有适配所述套接端的套接孔,所述套轴可沿所述套接孔的孔向进行移动;所述夹持手指设有铰接端和夹持端,所述铰接端设有圆弧面以及与所述连接端铰接的铰接孔,所述夹持端用于夹持物品;所述卡位端设有限位凸块,所述夹持手指的圆弧面设有若干限位凹位。
5、上述机械手通过设置连接件和夹持手指,利用连接组的连接件上的限位凸块与圆弧面的限位凹位配合,利用不同位置的限位凹位来调节夹持手指相对于连接件的角度位置,从而调节多个夹持手指形成的夹持空间大小,从而扩大机械手的夹持适用范围,有利于推广使用。
6、进一步的,所述连接组包括套接在所述套轴上的弹簧件,所述套接孔内设有限位块,所述套轴的套接端设有限位板;所述弹簧件的一端顶接所述限位块,另一端顶接所述限位板。
7、进一步的,所述连接件上的限位凸块为圆凸块,所述限位凹位为沿所述圆弧面间隔设置的圆凹槽。
8、进一步的,所述连接件上的限位凸块为定位齿,所述限位凹位为沿所述圆弧面间隔设置的限位齿槽,所述定位齿与限位齿槽适配。
9、进一步的,所述套轴包括轴件和铰接件,所述轴件设有螺纹端,所述铰接件设有与螺纹端适配的螺纹孔。
10、进一步的,所述夹持手指的铰接端为凹型结构,所述铰接件通过轴承可转动连接在所述铰接端上。
11、进一步的,所述连接件为l型结构。
12、进一步的,还包括安装组件,所述安装组件包括安装座、连接块和活动销,所述连接块与所述安装基座固定连接;所述安装座设有插接端,所述插接端上设有限位槽;所述连接块设有插接孔和与插接孔连通的空腔,所述活动销包括活动端和操作端,所述活动端设置在所述空腔内,所述操作端用于提拉所述活动销;当所述插接端插接到所述插接孔后,所述活动端从所述空腔移动到所述限位槽,从而实现所述安装座和所述连接块的固定连接。
13、进一步的,所述安装组件还包括安装弹簧,所述安装弹簧套合在所述活动销上;所述安装弹簧的一端顶压所述空腔的腔壁,另一端顶压所述活动端。
14、进一步的,所述安装座整体呈“冂”字结构,包括至少两个竖直臂和一个横向臂,所述插接端设置在所述竖直臂,所述横向臂上设有连接位。
技术特征:
1.一种机械手,其特征在于,包括:
2.根据权利要求1所述的机械手,其特征在于,所述连接组包括套接在所述套轴上的弹簧件,所述套接孔内设有限位块,所述套轴的套接端设有限位板;
3.根据权利要求2所述的机械手,其特征在于,所述连接件上的限位凸块为圆凸块,所述限位凹位为沿所述圆弧面间隔设置的圆凹槽。
4.根据权利要求2所述的机械手,其特征在于,所述连接件上的限位凸块为定位齿,所述限位凹位为沿所述圆弧面间隔设置的限位齿槽,所述定位齿与限位齿槽适配。
5.根据权利要求2所述的机械手,其特征在于,所述套轴包括轴件和铰接件,所述轴件设有螺纹端,所述铰接件设有与螺纹端适配的螺纹孔。
6.根据权利要求5所述的机械手,其特征在于,所述夹持手指的铰接端为凹型结构,所述铰接件通过轴承可转动连接在所述铰接端上。
7.根据权利要求2所述的机械手,其特征在于,所述连接件为l型结构。
8.根据权利要求1所述的机械手,其特征在于,还包括安装组件,所述安装组件包括安装座、连接块和活动销,所述连接块与所述安装基座固定连接;
9.根据权利要求8所述的机械手,其特征在于,所述安装组件还包括安装弹簧,所述安装弹簧套合在所述活动销上;
10.根据权利要求8所述的机械手,其特征在于,所述安装座整体呈“冂”字结构,包括至少两个竖直臂和一个横向臂,所述插接端设置在所述竖直臂,所述横向臂上设有连接位。
技术总结
本技术提供了一种机械手,包括安装基座和夹持组件,夹持组件包括驱动件和至少三组手指组,手指组包括连接组和夹持手指,连接组包括连接件和套轴;连接件设有连接部、铰接部和卡位端,连接部用于与驱动件连接,铰接部用于与安装基座连接;套轴包括套接端和连接端,连接件的卡位端上设有适配套接端的套接孔,套轴可沿套接孔的孔向进行移动;卡位端设有限位凸块,夹持手指的圆弧面设有若干限位凹位。通过设置连接件和夹持手指,利用连接组的连接件上的限位凸块与圆弧面的限位凹位配合,利用不同位置的限位凹位来调节夹持手指相对于连接件的角度位置,从而调节多个夹持手指形成的夹持空间大小,从而扩大机械手的夹持适用范围,有利于推广使用。
技术研发人员:樊继慧,李旭耀
受保护的技术使用者:广州理工学院
技术研发日:20230710
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!