一种可调高度的智能机器人的制作方法
本技术属于机器人领域,具体地说是一种可调高度的智能机器人。
背景技术:
1、智能机器人是集成了多种传感器以及设备的装置,且根据包含装置以及传感器的不同,机器人的具体用途也不相同,其中常见的机器人包括扫地机器人或物流运输用机器人等;
2、根据中国专利申请号为:202123421137.9,一种可调高度的智能机器人,智能机器人主体的下方固定设有一连接齿轮盘;升降筒体的内部两侧固定设有中空安装框体,中空安装框体的内上壁固定设有微型笔形气缸,微型笔形气缸的缸轴穿设过中空安装框体与侧立u形框相连,中空安装框体的下壁上还贯通开设有电机通孔;侧立u形框的内顶壁、内底壁上固定设有限位挡件,连接齿轮盘匹配设于侧立u形框内,且连接齿轮盘的两端均与限位挡件相贴,连接齿轮盘的高度与侧立u形框的高度相同,内顶壁、内底壁的2个侧立u形框之间留有容置空间,连接齿轮盘与主动齿轮相互啮合,对比例提供的一种可调高度的智能机器人,高度平移过程和转动过程均非常稳固,而且兼具了美观性,对比例通过装置的设置较好的对机器人进行了高度调节,但是在实际使用中,对比例对机器人设置的升降机构,仅仅通过传动机构进行支撑,且底部可能处于悬空状态,不便于对升起的部件进行稳定支撑,让例如需要运输物件的物流机器人在用于运输的情况使用时的稳定性降低,进而降低了机器人的实用性。
3、综上,因此本实用新型提供了一种可调高度的智能机器人,以解决上述问题。
技术实现思路
1、为了解决上述技术问题,本实用新型提供一种可调高度的智能机器人,以解决现有技术中通过传动机构进行支撑,且底部可能处于悬空状态,不便于对升起的部件进行稳定支撑,让例如需要运输物件的物流机器人在用于运输的情况使用时的稳定性降低,进而降低了机器人实用性的问题。
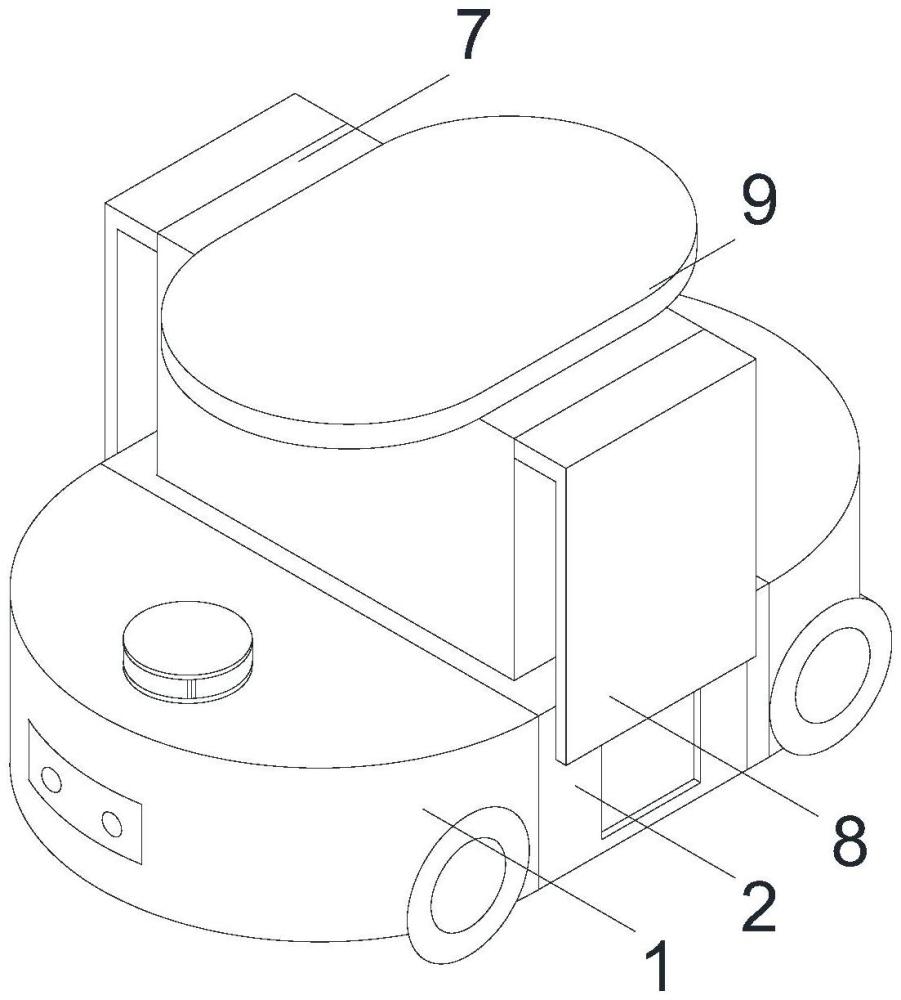
2、一种可调高度的智能机器人,包括机器人运输模块本体,所述机器人运输模块本体的数量为两个,前端所述机器人运输模块本体包括电机、驱动轮、激光雷达和摄像头,后端所述机器人运输模块本体包括电机和驱动轮,前端所述机器人运输模块本体的背面固定连接有安装框,后端所述机器人运输模块本体的正面固定连接有活动板,所述活动板的正面固定连接有支撑块,所述安装框内腔的两侧均固定连接有第一电动推杆,所述第一电动推杆的输出端贯穿安装框并与活动板固定连接,所述安装框内腔的两侧且位于第一电动推杆的一侧固定连接有第二电动推杆,所述安装框的顶部设置有升降框,所述升降框的两侧均固定连接有侧板,所述第二电动推杆的输出端贯穿安装框并与侧板的底部固定连接,所述升降框的顶部固定连接有支撑板。
3、优选的,所述支撑块的顶部与升降框的底部活动连接,所述安装框靠近升降框的一侧与升降框活动连接。
4、优选的,所述升降框的顶部开设有限位槽,所述限位槽的内腔固定连接有第三电动推杆,所述第三电动推杆的输出端与支撑板的底部固定连接。
5、优选的,所述升降框两侧的前端和后端均固定连接有滑杆,所述安装框靠近升降框一侧的前端和后端均开设有第一滑槽,所述滑杆的一侧延伸至第一滑槽的内腔,且与第一滑槽的内腔活动连接。
6、优选的,所述安装框的两侧均开设有第二滑槽,所述第二滑槽的内腔滑动连接有滑块,所述滑块的一侧与侧板的一侧固定连接。
7、优选的,所述活动板正面的两侧均固定连接有连接板,所述连接板的一端贯穿至安装框的内腔,且与安装框的内腔活动连接。
8、与现有技术相比,本实用新型具有如下有益效果:
9、1、本实用新型通过设置机器人运输模块本体、安装框、第二电动推杆、升降框和侧板,第二电动推杆配合侧板对升降框的高度调节,为装置提供基本的高度调节功能,以此让升降框的位移出活动板和安装框之间的空间,让装置可以适应不同规格高度的待运输装置。
10、2、本实用新型通过设置活动板、支撑块、第一电动推杆和支撑板,活动板配合第一电动推杆可以带动支撑块和后端机器人运输模块本体进行位移,进而让支撑块位移至升降框的底部,且对升降框进行支撑,防止了升降框被升高后,底部处于悬空的状态,配合支撑块的支撑,让装置具备了较稳定的支撑,并让升降框配合支撑板和第三电动推杆对外部带运输物体进行运输时的支撑稳定性得到增加,从而方便对升起的部件进行稳定支撑,让需要运输的物件被运输时的稳定性得到提高,进而提高了装置的实用性。
技术特征:
1.一种可调高度的智能机器人,包括机器人运输模块本体(1),其特征在于:所述机器人运输模块本体(1)的数量为两个,前端所述机器人运输模块本体(1)包括电机、驱动轮、激光雷达和摄像头,后端所述机器人运输模块本体(1)包括电机和驱动轮,前端所述机器人运输模块本体(1)的背面固定连接有安装框(2),后端所述机器人运输模块本体(1)的正面固定连接有活动板(3),所述活动板(3)的正面固定连接有支撑块(4),所述安装框(2)内腔的两侧均固定连接有第一电动推杆(5),所述第一电动推杆(5)的输出端贯穿安装框(2)并与活动板(3)固定连接,所述安装框(2)内腔的两侧且位于第一电动推杆(5)的一侧固定连接有第二电动推杆(6),所述安装框(2)的顶部设置有升降框(7),所述升降框(7)的两侧均固定连接有侧板(8),所述第二电动推杆(6)的输出端贯穿安装框(2)并与侧板(8)的底部固定连接,所述升降框(7)的顶部固定连接有支撑板(9)。
2.如权利要求1所述可调高度的智能机器人,其特征在于:所述支撑块(4)的顶部与升降框(7)的底部活动连接,所述安装框(2)靠近升降框(7)的一侧与升降框(7)活动连接。
3.如权利要求1所述可调高度的智能机器人,其特征在于:所述升降框(7)的顶部开设有限位槽(10),所述限位槽(10)的内腔固定连接有第三电动推杆(11),所述第三电动推杆(11)的输出端与支撑板(9)的底部固定连接。
4.如权利要求1所述可调高度的智能机器人,其特征在于:所述升降框(7)两侧的前端和后端均固定连接有滑杆(12),所述安装框(2)靠近升降框(7)一侧的前端和后端均开设有第一滑槽(13),所述滑杆(12)的一侧延伸至第一滑槽(13)的内腔,且与第一滑槽(13)的内腔活动连接。
5.如权利要求1所述可调高度的智能机器人,其特征在于:所述安装框(2)的两侧均开设有第二滑槽(14),所述第二滑槽(14)的内腔滑动连接有滑块(15),所述滑块(15)的一侧与侧板(8)的一侧固定连接。
6.如权利要求1所述可调高度的智能机器人,其特征在于:所述活动板(3)正面的两侧均固定连接有连接板(16),所述连接板(16)的一端贯穿至安装框(2)的内腔,且与安装框(2)的内腔活动连接。
技术总结
本技术提供一种可调高度的智能机器人,包括机器人运输模块本体,所述机器人运输模块本体的数量为两个,前端所述机器人运输模块本体包括电机、驱动轮、激光雷达和摄像头;本技术通过设置活动板、支撑块、第一电动推杆和支撑板,活动板配合第一电动推杆可以带动支撑块和后端机器人运输模块本体进行位移,进而让支撑块位移至升降框的底部,且对升降框进行支撑,防止了升降框被升高后,底部处于悬空的状态,配合支撑块的支撑,让装置具备了较稳定的支撑,并让升降框配合支撑板和第三电动推杆对外部带运输物体进行运输时的支撑稳定性得到增加,从而方便对升起的部件进行稳定支撑,让需要运输的物件被运输时的稳定性得到提高。
技术研发人员:张海,陈群
受保护的技术使用者:江苏大时博德智能科技有限公司
技术研发日:20230713
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!