自充电机器人的制作方法
本申请涉及自充电机器人,尤其是涉及一种自充电机器人。
背景技术:
1、在自充电机器人的使用过程中,为了适应不同的充电场景,自充电机器人的充电头需要具有多个自由度的运动。
2、cn 113696768a公开了一种履带机器人自动充电装置,包括由固定在充电位置处的供电组件和固定在车载机器人上的受电组件构成;供电组件包括设置在一保护罩内的电极推紧组件、z轴调整组件、y轴调整组件、θ轴调整组件和两台测距传感器;受电组件包括设置在一保护壳内的回归传感器反射窗、两个z轴感应器和两个充电触头;该装置设计合理,可实现位于车载机器人上的受电组件与位于充电位置的充电组件进行自行对接,非充电状态下能够通过防护罩防护以满足防尘、防水需求;无论在快速调整位置偏差还是在充电电极的防护上均得到有效提升,供电效率高,使用寿命长,安全性能好。因此,如何便于控制自充电机器人的充电头的位移方位,提高自充电机器人的充电头的适用性是目前亟需解决的问题之一。
技术实现思路
1、本申请旨在至少解决现有技术中存在的技术问题之一。为此,本申请提出一种自充电机器人,能够便于控制自充电机器人的充电头的位移方位,提高了自充电机器人的充电头的适用性。
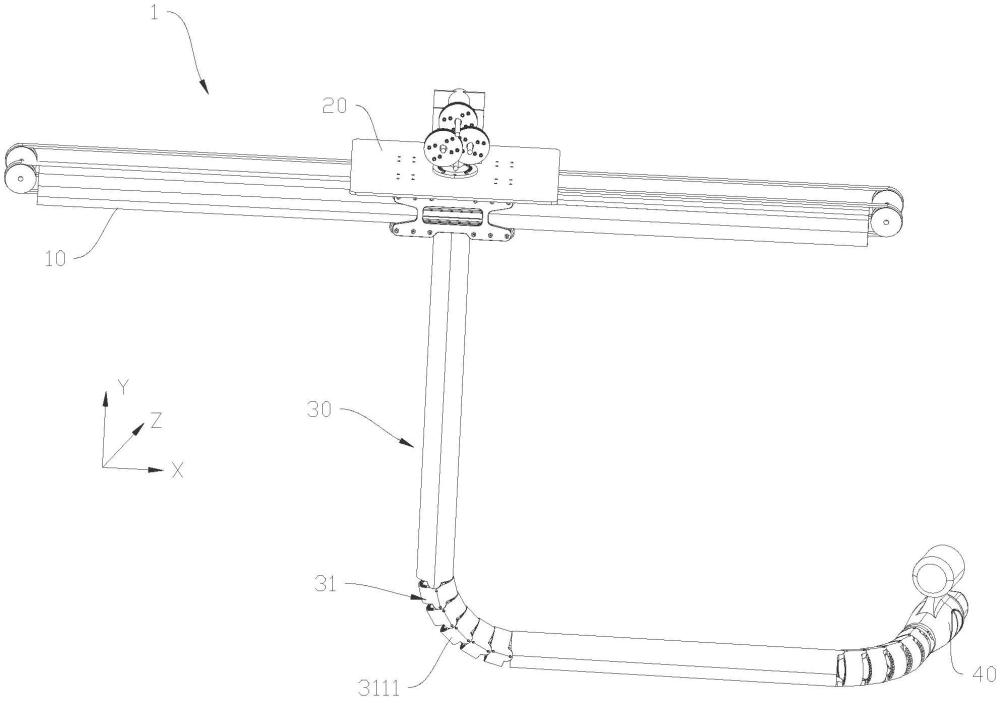
2、根据本申请第一方面实施例的一种自充电机器人,包括滑轨、平台、机械臂和充电头。所述滑轨沿第一方向设置;所述平台活动设置于所述滑轨,且能够沿所述第一方向移动;所述机械臂的一端与所述平台沿第二方向活动连接,所述机械臂的另一端设有转向部,所述转向部由所述第二方向向第三方向转动;所述充电头设置于所述机械臂远离所述平台的一端;其中,所述第一方向、所述第二方向和所述第三方向两两垂直。
3、根据本申请实施例的机械臂,至少具有如下有益效果:通过将平台与机械臂沿第二方向活动连接,且充电头设置于机械臂远离平台的一端,平台能够在滑轨上沿第一方向移动,机械臂能够由第二方向转向为第三方向,实现了充电头的多自由度移动,便于控制自动充电系统的自充电机器人的充电头的位移方位,提高了自充电机器人的充电头的适用性。
4、在一些实施例中,所述滑轨在所述第二方向上的两个端面均设有沿所述第一方向延伸的第一凹槽,所述平台设有沿所述第二方向相对设置的至少两个传动轮,至少两个所述传动轮分别设置于两个所述第一凹槽,且能够沿所述第一方向滑动。
5、在一些实施例中,所述第一凹槽在沿所述第二方向且靠近另一所述第一凹槽的方向上,所述第一凹槽的开口逐渐减小,所述传动轮在沿所述第二方向且靠近另一所述传动轮的方向上,所述传动轮的端面厚度逐渐减小,所述传动轮的端面与所述第一凹槽的开口匹配。
6、在一些实施例中,所述转向部包括多个转向节,所述转向节在所述第二方向上的两个端面分别设有转动件和第二凹槽;
7、其中,多个所述转向节沿所述第一方向设置,一所述转向节的所述转动件设置于相邻的另一所述转向节的所述第二凹槽,相邻的两个所述转向节能够沿相互配合的所述转动件和所述第二凹槽的轴向转动设定角度,直至相邻的两个所述转向节相对的两个表面抵接;和/或,直至一个所述转向节的所述转动件的表面与相邻的所述转向节的所述第二凹槽的壁面抵接。
8、在一些实施例中,所述机械臂还包括牵引件,所述转向节设有第一通孔,所述第一通孔贯穿所述转向节在所述第二方向上的两个表面,所述牵引件穿设于所述第一通孔,所述牵引件的一端与远离所述平台的所述转向节固定连接,另一端与所述平台连接,所述牵引件的另一端能够沿所述第二方向移动,以带动所述转向节转动。
9、在一些实施例中,所述自充电机器人还包括转动盘,所述转动盘设置于所述平台,所述牵引件远离所述转向节的一端绕射于所述转动盘,所述转动盘能够转动从而使得所述牵引件能够沿所述第二方向移动。
10、在一些实施例中,所述转动盘还具有第三凹槽,所述第三凹槽贯穿所述转动盘的内部,所述牵引件远离所述转向节的一端穿设于所述第三凹槽,并绕射于所述转动盘的外周面。
11、在一些实施例中,所述第三凹槽沿所述第二方向延伸,贯穿所述转动盘的外周面。
12、在一些实施例中,所述平台包括第一平板和第二平板,所述第一平板和第二平板沿所述第二方向活动设置,所述机械臂的一端穿设于所述第二平板且与所述第一平板固定连接。
13、在一些实施例中,所述平台还包括固定件和活动件,固定件沿所述第二方向延伸,所述固定件的一端与所述第二平板固定连接,另一端与所述第一平板活动连接,所述活动件活动设置于所述固定件且与所述第一平板固定连接。
14、本申请的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实践了解到。
技术特征:
1.一种自充电机器人,其特征在于,包括:
2.根据权利要求1所述的自充电机器人,其特征在于,所述滑轨在所述第二方向上的两个端面均设有沿所述第一方向延伸的第一凹槽,所述平台设有沿所述第二方向相对设置的至少两个传动轮,至少两个所述传动轮分别设置于两个所述第一凹槽,且能够沿所述第一方向滑动。
3.根据权利要求2所述的自充电机器人,其特征在于,所述第一凹槽在沿所述第二方向且靠近另一所述第一凹槽的方向上,所述第一凹槽的开口逐渐减小,所述传动轮在沿所述第二方向且靠近另一所述传动轮的方向上,所述传动轮的端面厚度逐渐减小,所述传动轮的端面与所述第一凹槽的开口匹配。
4.根据权利要求1所述的自充电机器人,其特征在于,所述转向部包括多个转向节,所述转向节在所述第二方向上的两个端面分别设有转动件和第二凹槽;
5.根据权利要求4所述的自充电机器人,其特征在于,所述机械臂还包括牵引件,所述转向节设有第一通孔,所述第一通孔贯穿所述转向节在所述第二方向上的两个表面,所述牵引件穿设于所述第一通孔,所述牵引件的一端与远离所述平台的所述转向节固定连接,另一端与所述平台连接,所述牵引件的另一端能够沿所述第二方向移动,以带动所述转向节转动。
6.根据权利要求5所述的自充电机器人,其特征在于,所述自充电机器人还包括转动盘,所述转动盘设置于所述平台,所述牵引件远离所述转向节的一端绕射于所述转动盘,所述转动盘能够转动从而使得所述牵引件能够沿所述第二方向移动。
7.根据权利要求6所述的自充电机器人,其特征在于,所述转动盘还具有第三凹槽,所述第三凹槽贯穿所述转动盘的内部,所述牵引件远离所述转向节的一端穿设于所述第三凹槽,并绕射于所述转动盘的外周面。
8.根据权利要求7所述的自充电机器人,其特征在于,所述第三凹槽沿所述第二方向延伸,贯穿所述转动盘的外周面。
9.根据权利要求1所述的自充电机器人,其特征在于,所述平台包括第一平板和第二平板,所述第一平板和第二平板沿所述第二方向活动设置,所述机械臂的一端穿设于所述第二平板且与所述第一平板固定连接。
10.根据权利要求9所述的自充电机器人,其特征在于,所述平台还包括固定件和活动件,固定件沿所述第二方向延伸,所述固定件的一端与所述第二平板固定连接,另一端与所述第一平板活动连接,所述活动件活动设置于所述固定件且与所述第一平板固定连接。
技术总结
本申请公开了一种自充电机器人,包括滑轨、平台、机械臂和充电头。滑轨沿第一方向设置;平台活动设置于滑轨,且能够沿第一方向移动;机械臂的一端与平台沿第二方向活动连接,机械臂的另一端设有转向部,转向部由第二方向向第三方向转动;充电头设置于机械臂远离平台的一端;其中,第一方向、第二方向和第三方向两两垂直。通过将平台与机械臂沿第二方向活动连接,且充电头设置于机械臂远离平台的一端,平台能够在滑轨上沿第一方向移动,机械臂能够由第二方向转向为第三方向,实现了充电头的多自由度移动,便于控制自动充电系统的自充电机器人的充电头的位移方位,提高了自充电机器人的充电头的适用性。
技术研发人员:周奕豪,王宇轩
受保护的技术使用者:东莞市奕东机械设备有限公司
技术研发日:20230731
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!