一种机械手的转臂结构的制作方法
本技术涉及机械手领域,尤其涉及一种机械手的转臂结构。
背景技术:
1、机器人的臂和手,以对应于,一部分分实验室在这样的放射性物质,例如远程处理,广泛的工业用机器人中的领域中使用。在类人机器人的情况下,它被表示为像人一样的手臂。通常,操作机器人的人称为“操作员。
2、现有的机械手的转臂结构在使用的过程中饭大多机械手通过转臂结构都只能进行环形转动,但是如果在工作的过程中机械手的长度不够则使用者便需要对机械手的位置进行调节,而大多机械手都较为笨重不便进行调节位置。
3、因此,有必要提供一种机械手的转臂结构解决上述技术问题。
技术实现思路
1、本实用新型提供一种机械手的转臂结构,解决现有的机械手的转臂结构在使用的过程中饭大多机械手通过转臂结构都只能进行环形转动,但是如果在工作的过程中机械手的长度不够则使用者便需要对机械手的位置进行调节,而大多机械手都较为笨重不便进行调节位置的问题。
2、为解决上述技术问题,本实用新型提供的:一种机械手的转臂结构,包括定位座,所述定位座的底端四角均固定有万向轮,所述定位座的上表面两侧均开设有滑槽,所述定位座上表面中间位置开设有沉槽,所述定位座的内部且位于沉槽的内部通过轴承转动安装有螺杆,所述定位座的一侧外壁固定有第一电机,所述第一电机的输出轴与其中一个所述螺杆的一端固定连接,所述定位座的上表面通过两个所述滑槽滑动安装有底座板,所述底座板与螺杆之间螺纹连接。
3、优选的,所述底座板的内部固定有第二电机,所述底座板的内部通过轴承转动安装有转杆。
4、优选的,所述转杆的外部和第二电机的输出轴外部均固定有伞齿轮,两个所述伞齿轮之间为啮合连接。
5、优选的,所述转杆的上表面固定有定位盘,所述定位盘的上表面固定安装有连接座,所述底座板的上表面开设有限位圆环槽。
6、优选的,所述连接座的上表面固定有转架,所述转架的一侧外壁固定有第三电机。
7、优选的,所述转架的另一侧转动安装有调节臂,所述第三电机的输出轴与调节臂的一侧固定连接。
8、与相关技术相比较,本实用新型提供的一种机械手的转臂结构具有如下有益效果:
9、本实用新型的有益效果为:使用者在使用调节臂时,可以通过启动第一电机,当第一电机启动后便会带动螺杆进行转动,而螺杆转动后便会与底座板进行螺纹连接,当螺杆与底座板进行螺纹连接后底座板便可以对调节臂的位置进行前后调节,以便调节臂在工作的过程中可以更加便捷灵活。
技术特征:
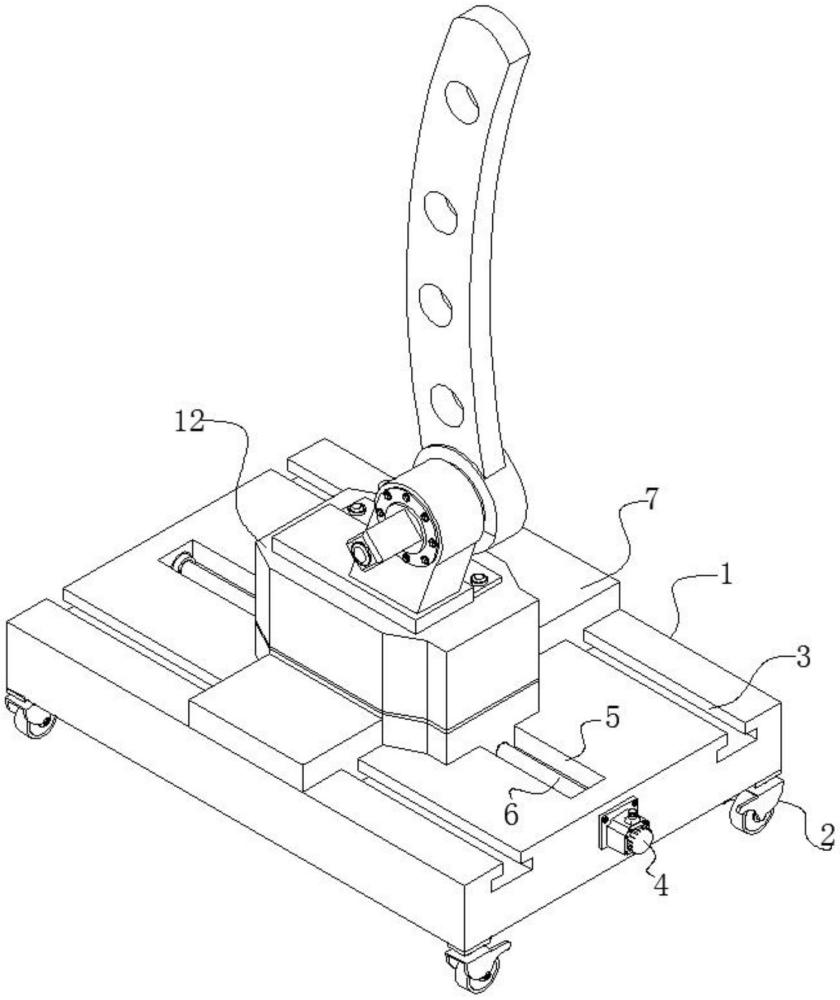
1.一种机械手的转臂结构,包括定位座(1),其特征在于,所述定位座(1)的底端四角均固定有万向轮(2),所述定位座(1)的上表面两侧均开设有滑槽(3),所述定位座(1)上表面中间位置开设有沉槽(5),所述定位座(1)的内部且位于沉槽(5)的内部通过轴承转动安装有螺杆(6),所述定位座(1)的一侧外壁固定有第一电机(4),所述第一电机(4)的输出轴与其中一个所述螺杆(6)的一端固定连接,所述定位座(1)的上表面通过两个所述滑槽(3)滑动安装有底座板(7),所述底座板(7)与螺杆(6)之间螺纹连接。
2.根据权利要求1所述的一种机械手的转臂结构,其特征在于,所述底座板(7)的内部固定有第二电机(9),所述底座板(7)的内部通过轴承转动安装有转杆(8)。
3.根据权利要求2所述的一种机械手的转臂结构,其特征在于,所述转杆(8)的外部和第二电机(9)的输出轴外部均固定有伞齿轮(10),两个所述伞齿轮(10)之间为啮合连接。
4.根据权利要求3所述的一种机械手的转臂结构,其特征在于,所述转杆(8)的上表面固定有定位盘(11),所述定位盘(11)的上表面固定安装有连接座(12),所述底座板(7)的上表面开设有限位圆环槽(13)。
5.根据权利要求4所述的一种机械手的转臂结构,其特征在于,所述连接座(12)的上表面固定有转架(14),所述转架(14)的一侧外壁固定有第三电机(15)。
6.根据权利要求5所述的一种机械手的转臂结构,其特征在于,所述转架(14)的另一侧转动安装有调节臂(16),所述第三电机(15)的输出轴与调节臂(16)的一侧固定连接。
技术总结
本技术提供一种机械手的转臂结构,包括定位座,所述定位座的底端四角均固定有万向轮,所述定位座的上表面两侧均开设有滑槽,所述定位座上表面中间位置开设有沉槽,所述定位座的内部且位于沉槽的内部通过轴承转动安装有螺杆,所述定位座的一侧外壁固定有第一电机,所述第一电机的输出轴与其中一个所述螺杆的一端固定连接。本技术提供机械手的转臂结构使用者在使用调节臂时,可以通过启动第一电机,当第一电机启动后便会带动螺杆进行转动,而螺杆转动后便会与底座板进行螺纹连接,当螺杆与底座板进行螺纹连接后底座板便可以对调节臂的位置进行前后调节,以便调节臂在工作的过程中可以更加便捷灵活。
技术研发人员:冯涛,纪晓,王仁波,王旭东
受保护的技术使用者:青岛海纳特船舶设备制造有限公司
技术研发日:20230808
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!