一种框体机架方管夹手的制作方法
本技术涉及机械领域,尤其是涉及装夹运输,具体为一种框体机架方管夹手。
背景技术:
1、现有自动化生产线的机器人夹手,加工阀组机架时需要夹的工件类型有方管框架和方管,同时必须居中夹取,适配生产线的自动定位便于后续将两者焊接拼装,现有自动化生产线中夹手只能单个夹取,并且因为方管框架和方管长度相差太大必须用两个规格夹手才能夹取不能满足客户要求,现需要设计能同时居中夹取框体和方管的的机械夹手。
技术实现思路
1、鉴于以上所述现有技术的缺点,本实用新型的目的在于提供一种框体机架方管夹手,用于解决现有技术的难点。
2、为实现上述目的及其他相关目的,本实用新型提供一种框体机架方管夹手,包括:
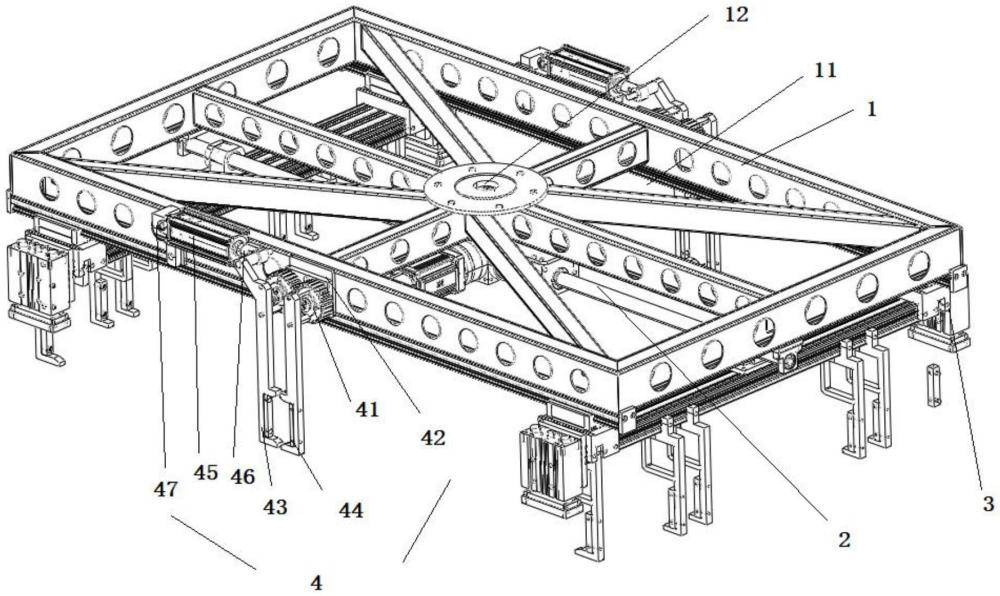
3、抓手底板1,所述抓手底板1四周等间距设置有减重槽11,所述抓手底板1顶端正中设置有法兰盘12;
4、框体抓取装置,所述框体抓取装置设置在抓手底板1底端,所述框体抓取装置包括:横向锁紧装置2和竖直锁紧装置3,所述横向锁紧装置2设置在抓手底板1底端,所述横向锁紧装置2中直线滑轨21位于抓手底板1底端的左右两侧;所述竖直锁紧装置3设置在横向锁紧装置2的正下方,所述竖直锁紧装置3中的滑板块与直线滑轨21中的直线滑块22相连;
5、管体抓取装置4,所述管体抓取装置4设置在抓手底板1的左右两侧,所述管体抓取装置4中沿抓手底板1的中轴线对称并排设置有两个的直齿齿轮41,两个所述直齿齿轮41相互啮合,两个所述直齿齿轮41一侧分别安装有主动转臂43和从动转臂44。
6、根据优选方案,横向锁紧装置2包括:
7、直线滑轨21,所述直线滑轨21上卡设有直线滑块22,所述直线滑块22沿直线滑轨21前后移动;
8、直角减速机23,所述直角减速机23设置在抓手底板1顶端的正中,所述直角减速机23靠近管体抓取装置4的一侧连接有低惯量伺服电机24,所述直角减速机23左右两侧设置有联轴器25;
9、丝杆26,所述丝杆26平行设置在两侧直线滑轨21的正中,所述丝杆26的前后两侧套设有丝杆支撑座27,所述丝杆支撑座27顶端通过螺栓与抓手底板1相连,所述丝杆支撑座27靠近直角减速机23的一侧所述丝杆支撑座27与联轴器25相连;
10、连接块28,所述连接块28套设在丝杆26上,所述直角减速机23驱动联轴器25带动丝杆26旋转使连接块28向直角减速机23的方向靠近或者远离。
11、根据优选方案,靠近直角减速机23一侧的丝杆支撑座27大于靠近抓手底板1边框的一侧丝杆支撑座27。
12、根据优选方案,竖直锁紧装置3包括:
13、夹手底座31,所述夹手底座31设置在横向锁紧装置2的正下方,所述夹手底座31正中通过螺栓与连接块28相连,所述夹手底座31两侧套设有滑块板32,所述滑块板32通过螺栓与直线滑块22相连;
14、机器人抓夹33,所述机器人抓夹33设置有数个,数个所述机器人抓夹33沿夹手底座31的中心线对称卡设在夹手底座31的正中;
15、压紧气缸34,所述压紧气缸34设置在滑块板32远离机器人抓夹33的一侧。
16、根据优选方案,连接块28驱动夹手底座31沿直线滑轨21前后移动。
17、根据优选方案,管体抓取装置4包括:
18、直齿齿轮41,所述直齿齿轮41一侧通过齿轮安装座42与抓手底板1相连,两个所述直齿齿轮41另一侧分别套设有主动转臂43和从动转臂44,所述从动转臂44上下两侧驱动杆分别卡设在直齿齿轮41上,所述主动转臂43下侧驱动杆卡设在直齿齿轮41上,所述主动转臂43上侧驱动杆与驱动气缸45相连;
19、驱动气缸45,所述驱动气缸45通过铰链座47安装在抓手底板1的侧壁上,所述驱动气缸45正中穿设有驱动杆46,所述驱动杆46顶端套设有主动转臂43上侧驱动杆。
20、根据优选方案,驱动气缸45驱动驱动杆46前后移动带动主动转臂43摆动,主动转臂43驱动相互啮合的直齿齿轮41旋转使从动转臂44配合主动转臂43张开或者抓紧。
21、本实用新型采用抓手底板、横向锁紧装置、竖直锁紧装置和管体抓取装置装配组成,通过框体抓取装置中的低惯量伺服电机驱动直角减速机带动丝杆旋转,丝杆驱动连接块带动夹手底座沿直线滑轨前后移动使机器人抓夹纵向抓紧方管框架,驱动气缸向下压给与方管框架向下的力使方管框架被竖直锁紧在机器人抓夹上,同时通过管体抓取装置中驱动气缸驱动驱动杆前后移动带动主动转臂摆动,主动转臂驱动相互啮合的直齿齿轮旋转使从动转臂配合主动转臂锁紧方管即可完成对方管方管的夹取实现一个夹手同时居中夹取宽度差距较大的方管框架和方管。
22、下文中将结合附图对实施本实用新型的最优实施例进行更详尽的描述,以便能容易地理解本实用新型的特征和优点。
技术特征:
1.一种框体机架方管夹手,其特征在于,包括:
2.根据权利要求1所述的框体机架方管夹手,其特征在于,所述横向锁紧装置(2)包括:
3.根据权利要求2所述的框体机架方管夹手,其特征在于,所述竖直锁紧装置(3)包括:
4.根据权利要求3所述的框体机架方管夹手,其特征在于,所述管体抓取装置(4)包括:
技术总结
本技术提供一种框体机架方管夹手,包括抓手底板四周等间距设置有减重槽,抓手底板顶端正中设置有法兰盘;框体抓取装置设置在抓手底板底端,框体抓取装置包括:横向锁紧装置和竖直锁紧装置,横向锁紧装置设置在抓手底板底端,横向锁紧装置中直线滑轨位于抓手底板底端的左右两侧;竖直锁紧装置设置在横向锁紧装置的正下方,竖直锁紧装置中的滑板块与直线滑轨中的直线滑块相连;管体抓取装置设置在抓手底板的左右两侧,管体抓取装置中沿抓手底板的中轴线对称并排设置有两个的直齿齿轮,两个直齿齿轮相互啮合,两个直齿齿轮一侧分别安装有主动转臂和从动转臂,通过框体抓取装置和配合实现一个夹手同时居中夹取宽度差距较大的方管框架和方管。
技术研发人员:吴伟
受保护的技术使用者:无锡美科勒自动化设备有限公司
技术研发日:20230810
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!