导轨原位电磁制动机构
本技术的至少一种实施例涉及导轨制动装置,具体涉及一种导轨原位电磁制动机构。
背景技术:
1、直线关节是机器人运动中的基本组成部分,用于对某一方向上的位置坐标进行调整,其最简单直接的实现方式为设置直线型导轨。在导轨约束下令机器人运动至目标区域,辅助后续作业任务的开展。为了保证机器人操作的安全性,在滑块沿导轨的制动过程中,需要使得滑块平稳定位在导轨的目标位置。
2、为了解决上述问题,现有技术中通常采用搭配丝杠等附件,将直线运动转化为更容易添加制动组件的转动运动的导轨制动机构,以达到对滑块在导轨上的可靠制动。由此,现有技术中的导轨制动机构通常存在复杂度较高以及在同一导轨上同时存在用于滑块制动的多个制动单元时,多个制动单元占用体积增大、制动单元的集成难度增加以及容易发生多个制动单元之间相互干涉的问题。
技术实现思路
1、有鉴于此,本实用新型的实施例提供了一种导轨原位电磁制动机构,通过在导轨的至少一侧表面沿导轨延伸方向间隔设置多个限位槽以及与该多个限位槽适配的锁止组件,以将第一滑块锁止在导轨沿其延伸方向的任一位置。
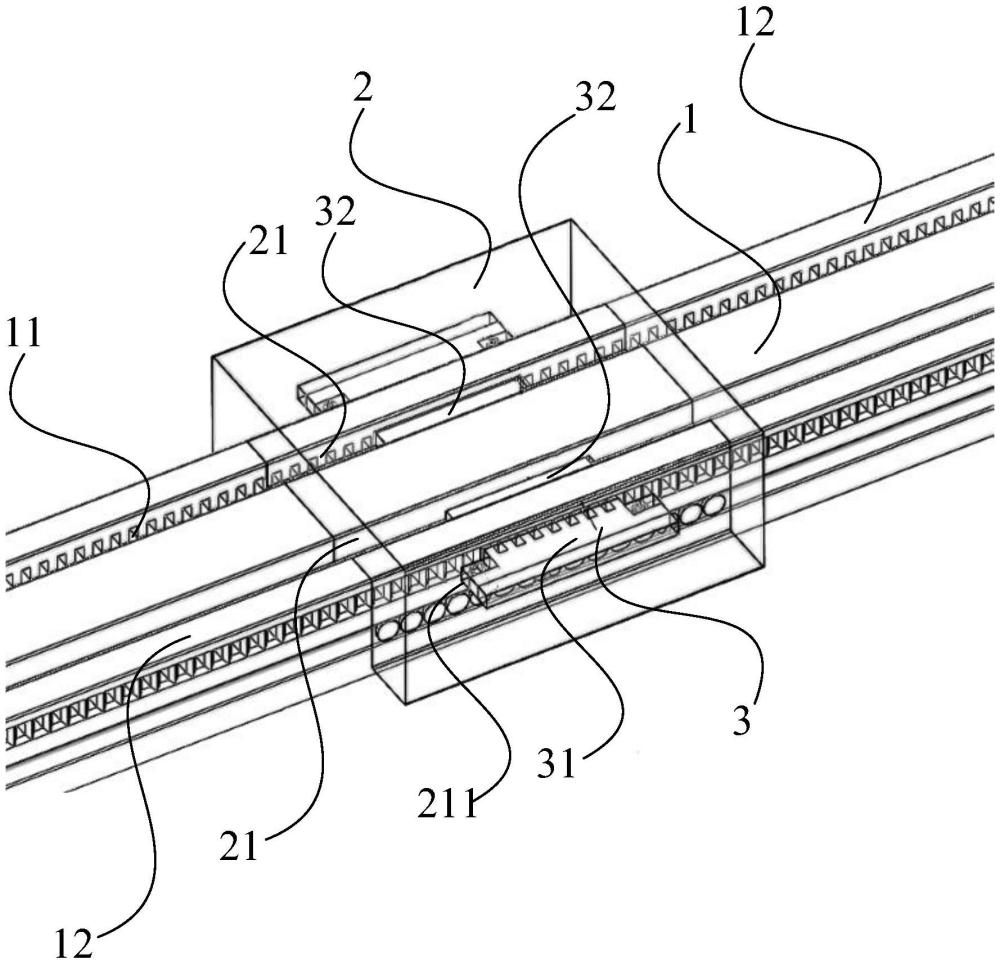
2、根据本实用新型的实施例,提供了一种导轨原位电磁制动机构,包括:导轨,所述导轨的至少一侧表面沿所述导轨的延伸方向间隔设置有多个限位槽;第一滑块,可滑动地安装于所述导轨上;锁止组件,包括:伸缩件,安装于所述第一滑块的与所述导轨所设置的所述限位槽相面对的端面内,被构造成在位于所述第一滑块内的缩回位置及至少一部分由所述第一滑块伸出并嵌入所述导轨设置的所述限位槽内的锁止位置之间移动;以及驱动部,适用于驱动所述伸缩件在所述缩回位置及所述锁止位置之间移动。
3、根据本实用新型的实施例,所述伸缩件的与所述限位槽相面对的一侧设置有多个插接端,多个所述插接端适用于在所述伸缩件处于锁止位置的状态下,嵌入所述限位槽内。
4、根据本实用新型的实施例,所述导轨上配置有凸部,所述第一滑块内设置有适用于与所述导轨的凸部滑动配合的凹部;其中,所述第一滑块所形成的所述凹部的一个内壁上设置有一个容纳槽,所述伸缩件可伸缩地安装于所述容纳槽内,所述限位槽设置在所述凸部上。
5、根据本实用新型的实施例,所述驱动部包括:吸合件,安装在所述第一滑块的所述凹部与所述伸缩件相面对的另一侧内壁上,适用于在导通状态下吸附所述伸缩件至所述锁止位置;以及复位弹簧,沿垂直于所述导轨的方向设置在所述容纳槽的肩部及所述伸缩件之间,适用于响应于所述吸合件的断电状态使所述伸缩件复位至所述缩回位置。
6、根据本实用新型的实施例,所述驱动部包括:吸合件,安装在所述第一滑块的所述容纳槽内的与所述导轨相背离的端面上,适用于在导通状态下吸附所述伸缩件至所述缩回位置;以及复位弹簧,沿垂直于所述导轨的方向设置在所述容纳槽的与所述导轨相背离的端面及所述伸缩件之间,适用于响应于所述吸合件的断电状态使所述伸缩件移动至所述锁止位置。
7、根据本实用新型的实施例,所述导轨上间隔设置有沿所述导轨延伸方向延伸的两个凸部;所述第一滑块上设置有适用于与两个所述凸部滑动配合的凹部。
8、根据本实用新型的实施例,所述导轨的两个所述凸部上均设置有所述限位槽。
9、根据本实用新型的实施例,所述第一滑块的两个凹部的内表面分别设置有一锁止组件;并且/或者,每个所述凸部上的多个所述限位槽在所述凸部上等间距分布。
10、根据本实用新型的实施例,所述限位槽被构造成盲槽结构。
11、根据本实用新型的实施例,所述限位槽被构造成通槽结构。
12、根据本实用新型的上述实施例的导轨原位电磁制动机构,通过在导轨的至少一侧表面沿导轨延伸方向间隔设置多个限位槽以及与该多个限位槽适配的锁止组件,在驱动部的驱动下,伸缩件在位于第一滑块内的缩回位置及锁止位置之间移动,使得伸缩件部分地从第一滑块伸出并嵌入导轨设置的限位槽中,以实现将第一滑块锁止在导轨沿其延伸方向的任一位置。
技术特征:
1.一种导轨原位电磁制动机构,包括:
2.根据权利要求1所述的导轨原位电磁制动机构,其中,所述伸缩件(31)的与所述限位槽(11)相面对的一侧设置有多个插接端(311),多个所述插接端(311)适用于在所述伸缩件(31)处于锁止位置的状态下,嵌入所述限位槽(11)内。
3.根据权利要求2所述的导轨原位电磁制动机构,其中,所述导轨(1)上配置有凸部(12),所述第一滑块(2)内设置有适用于与所述导轨(1)的凸部(12)滑动配合的凹部(21);
4.根据权利要求3所述的导轨原位电磁制动机构,其中,所述驱动部(32)包括:
5.根据权利要求3所述的导轨原位电磁制动机构,其中,所述驱动部(32)包括:
6.根据权利要求1至5中任一所述的导轨原位电磁制动机构,其中,所述导轨(1)上间隔设置有沿所述导轨(1)延伸方向延伸的两个凸部(12);
7.根据权利要求6所述的导轨原位电磁制动机构,其中,所述导轨(1)的两个所述凸部(12)上均设置有所述限位槽(11)。
8.根据权利要求7所述的导轨原位电磁制动机构,其中,所述第一滑块(2)的两个凹部(21)的内表面分别设置有一锁止组件(3);并且/或者,
9.根据权利要求1至5中任一所述的导轨原位电磁制动机构,其中,所述限位槽(11)被构造成盲槽结构。
10.根据权利要求1至5中任一所述的导轨原位电磁制动机构,其中,所述限位槽(11)被构造成通槽结构。
技术总结
本技术公开了一种导轨原位电磁制动机构,包括:导轨,导轨的至少一侧表面沿导轨的延伸方向间隔设置有多个限位槽;第一滑块,可滑动地安装于导轨上;锁止组件,包括:伸缩件,安装于第一滑块的与导轨所设置的限位槽相面对的端面内,被构造成在位于第一滑块内的缩回位置及至少一部分由第一滑块伸出并嵌入导轨设置的限位槽内的锁止位置之间移动;以及驱动部,适用于驱动伸缩件在缩回位置及锁止位置之间移动。以将第一滑块锁止在导轨沿其延伸方向的任一位置。
技术研发人员:王树新,王佳童,赵建厂,李进华,赵海心
受保护的技术使用者:天津大学医疗机器人与智能系统研究院
技术研发日:20230817
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!