一种外骨骼机器人的制作方法
本申请涉及人体外骨骼机器人,更具体的涉及一种外骨骼机器人。
背景技术:
1、外骨骼机器人实质上是一种可穿戴式的机械结构,其通过为某些人体行为提供外部力量如身体支撑、运动辅助和助力搬运等来实现辅助或增强人体动作的功能。外骨骼机器人和操作者组成的人-外骨骼系统对环境适应能力强大,兼具人的灵活、智慧与机械结构的可靠和强壮,已经引起了科研人员的广泛关注,并逐渐应用于辅助医疗康复、工业生产、单兵作战等领域,发展前景广阔。
2、现有技术中的外骨骼机器人无法准确检测腿杆相对髋关节的旋转角度以及行走抬、落腿时因膝盖弯曲动作导致的腿杆相对髋关节的伸缩移动长度,从而降低了外骨骼机器人动作角度、伸缩位移的准确性,影响使用体验。
技术实现思路
1、有鉴于此,本申请提供了一种外骨骼机器人,以解决外骨骼机器人动作角度、伸缩位移准确性差的问题。
2、为了达到上述目的,本申请提供如下技术方案:
3、一种外骨骼机器人,用于人体助力行走,包括:
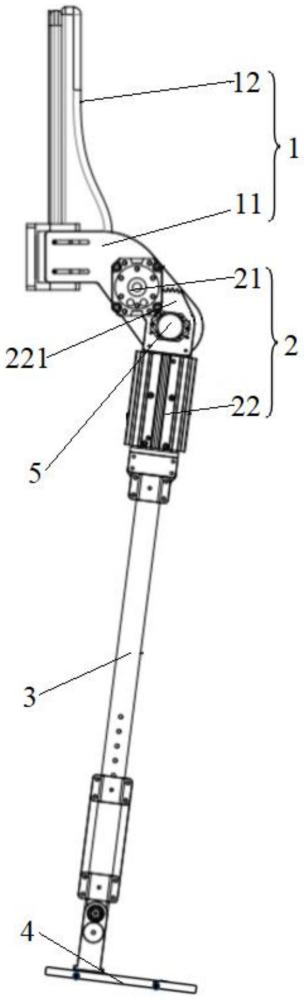
4、佩戴组件,佩戴于人体,包括髋关节连接件;
5、腿杆驱动组件,连接于所述髋关节连接件;
6、腿杆,连接于所述腿杆驱动组件;所述腿杆能够在所述腿杆驱动组件的驱动下相对所述髋关节连接件进行转动,并且能够在所述腿杆驱动组件的驱动下相对所述髋关节连接件沿所述腿杆的延伸方向伸缩移动;
7、姿态传感器,用于检测所述腿杆相对所述髋关节连接件的转动角度,同时用于检测所述腿杆相对所述髋关节连接件沿所述腿杆的延伸方向伸缩移动的位移量;
8、控制件,分别与所述姿态传感器、所述腿杆驱动组件通讯连接。
9、优选的,所述外骨骼机器人,还包括脚板;所述脚板连接于所述腿杆;
10、所述姿态传感器还用于检测所述脚板所承受的压力。
11、优选的,所述腿杆驱动组件包括:
12、旋转驱动组件;
13、线性驱动组件,转动连接于所述髋关节连接件,且在所述旋转驱动组件的驱动下相对所述髋关节连接件进行旋转;
14、其中,所述腿杆连接于所述线性驱动组件的伸缩移动件。
15、优选的,所述姿态传感器包括角度测量传感器;
16、所述角度测量传感器设置于所述线性驱动组件与所述髋关节连接件的转动连接处。
17、优选的,所述姿态传感器包括位移测量传感器;
18、所述位移测量传感器设置于所述线性驱动组件上,用于测量所述伸缩移动件的位移量。
19、优选的,所述旋转驱动组件包括旋转输出轴和与所述旋转输出轴传动连接的传动件;
20、所述线性驱动组件包括与所述髋关节连接件转动连接的连接部;所述连接部与所述传动件传动连接。
21、优选的,
22、所述旋转驱动组件包括旋转气缸;
23、所述线性驱动组件包括伸缩气缸。
24、优选的,所述腿杆驱动组件包括气压源、连接所述气压源和所述旋转气缸、所述伸缩气缸的导气管路以及设置于所述导气管路的电磁控制阀;
25、所述导气管路包括与所述气压源连接的一级管路、从所述一级管路引出的多个二级管路以及从每个所述二级管路引出并分别与所述旋转气缸和所述伸缩气缸连接的多个三级管路;
26、所述电磁控制阀设置于所述三级管路;所述电磁控制阀与所述控制件通讯连接,用于调节所述旋转气缸的旋转动作,以及调节所述伸缩气缸的伸缩动作。
27、优选的,所述腿杆驱动组件还包括电动调节阀;所述电动调节阀设置于所述二级管路;所述电动调节阀与所述控制件通讯连接,用于调节所述气压源向所述旋转气缸、所述伸缩气缸提供动力的比例系数。
28、优选的,所述腿杆驱动组件还包括手动调节阀;所述手动调节阀连接于所述一级管路,用于调节所述气压源向所述旋转气缸、所述伸缩气缸提供动力的上限值。
29、优选的,所述佩戴组件包括背板;所述背板相对的两侧分别连接有所述髋关节连接件。
30、优选的,所述控制件为开发控制板;所述开发控制板设置于所述背板。
31、本申请提供的外骨骼机器人中,通过腿杆驱动组件驱动腿杆相对髋关节连接件进行转动,同时驱动腿杆相对髋关节连接件沿腿杆的延伸方向伸缩移动;在上述动作过程中,仅通过姿态传感器检测腿杆相对髋关节连接件的旋转角度,以及因膝盖弯曲导致的腿杆相对髋关节连接件沿腿杆的延伸方向伸缩移动的位移量,就可以精准得到人体在行走过程中所处的动作状态,并准确生成人体动作信号;姿态传感器将得到的人体动作信号发送至控制件,并通过控制件精准控制腿杆驱动组件驱动腿杆的下一步动作状态,实现了人体助力行走的闭环控制,保证了外骨骼机器人动作角度、伸缩位移的准确性,助力行走连贯流畅,用户体验感极佳。
技术特征:
1.一种外骨骼机器人,其特征在于,用于人体助力行走,包括:
2.根据权利要求1所述的外骨骼机器人,其特征在于,所述外骨骼机器人还包括脚板(4);所述脚板(4)连接于所述腿杆(3);
3.根据权利要求1所述的外骨骼机器人,其特征在于,所述腿杆驱动组件(2)包括:
4.根据权利要求3所述的外骨骼机器人,其特征在于,所述姿态传感器包括角度测量传感器(5);
5.根据权利要求3所述的外骨骼机器人,其特征在于,所述姿态传感器包括位移测量传感器;
6.根据权利要求3所述的外骨骼机器人,其特征在于,所述旋转驱动组件(21)包括旋转输出轴和与所述旋转输出轴传动连接的传动件;
7.根据权利要求3所述的外骨骼机器人,其特征在于,
8.根据权利要求7所述的外骨骼机器人,其特征在于,所述腿杆驱动组件(2)包括气压源、连接所述气压源和所述旋转气缸、所述伸缩气缸的导气管路以及设置于所述导气管路的电磁控制阀;
9.根据权利要求8所述的外骨骼机器人,其特征在于,所述腿杆驱动组件(2)还包括电动调节阀;所述电动调节阀设置于所述二级管路;所述电动调节阀与所述控制件通讯连接,用于调节所述气压源向所述旋转气缸、所述伸缩气缸提供动力的比例系数。
10.根据权利要求8所述的外骨骼机器人,其特征在于,所述腿杆驱动组件(2)还包括手动调节阀;所述手动调节阀连接于所述一级管路,用于调节所述气压源向所述旋转气缸、所述伸缩气缸提供动力的上限值。
11.根据权利要求1-10中任一项所述的外骨骼机器人,其特征在于,所述佩戴组件(1)包括背板(12);所述背板(12)相对的两侧分别连接有所述髋关节连接件(11)。
12.根据权利要求1-10中任一项所述的外骨骼机器人,其特征在于,所述控制件为开发控制板;所述开发控制板设置于所述佩戴组件(1)。
技术总结
本申请公开了一种外骨骼机器人,包括:佩戴组件,包括髋关节连接件;腿杆驱动组件;腿杆;腿杆能够在腿杆驱动组件的驱动下相对髋关节连接件进行转动,并且能够在腿杆驱动组件的驱动下相对髋关节连接件沿腿杆的延伸方向伸缩移动;姿态传感器,用于检测腿杆相对髋关节连接件的转动角度,同时用于检测腿杆相对髋关节连接件沿腿杆的延伸方向伸缩移动的位移量;控制件,分别与姿态传感器、腿杆驱动组件通讯连接。姿态传感器能够精准得到人体在行走过程中所处的动作状态,并准确生成人体动作信号;控制件接收人体动作信号并控制腿杆的下一步动作状态,保证了外骨骼机器人动作角度、伸缩位移的准确性,助力行走连贯流畅、平缓稳定,用户体验感极佳。
技术研发人员:马帆,陈博宇,赵泰祥
受保护的技术使用者:科大讯飞股份有限公司
技术研发日:20230824
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!