一种用于工业机器人的抓取装置的制作方法
本技术涉及抓取装置领域,尤其涉及一种用于工业机器人的抓取装置。
背景技术:
1、随着经济的快速发展和科技水平的日益提高,在工业生产领域,多批次少批量的生产模式和非结构化的作业场景已成为目前企业的生产常态,这要求生产的自动化系统在确保成本效益前提下需具备更大的柔性和适应性来处理不同形状、大小和材质的零件,需要使用到抓取装置。
2、但现有市场中的抓取装置在使用的过程中不便于对圆柱形零件进行夹持,由于圆柱形零件表面较为光滑,通过夹持爪夹持后,在运输的过程中容易脱落,造成零件损坏的问题。
3、因此,有必要提供一种用于工业机器人的抓取装置解决上述技术问题。
技术实现思路
1、本实用新型提供一种用于工业机器人的抓取装置,解决了现有市场中的抓取装置在使用的过程中不便于对圆柱形零件进行夹持,由于圆柱形零件表面较为光滑,通过夹持爪夹持后,在运输的过程中容易脱落,造成零件损坏的问题。
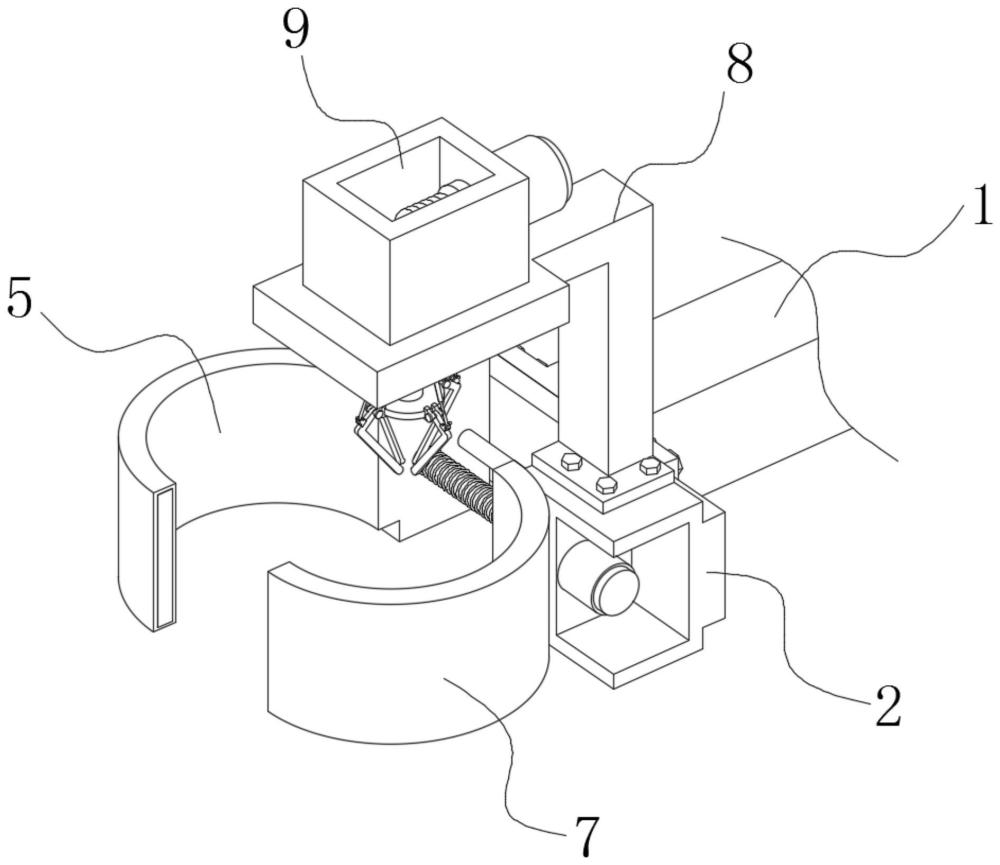
2、本实用新型提供一种用于工业机器人的抓取装置,包括:机器臂,所述机器臂的一端固定安装有固定架,所述固定架的内部通过轴承转动安装有丝杆,所述丝杆的一端贯穿固定架且延伸至外部,所述丝杆的一端键槽连接有第一电机,所述第一电机与固定架之间为固定安装,所述丝杆的外部啮合连接有移动夹板,所述固定架的内部且位于丝杆的一侧固定安装有限位杆,所述移动夹板与限位杆之间为滑动安装,所述固定架的外部一侧固定安装有固定夹板。
3、优选的,所述固定架的顶部固定安装有安装架,所述安装架的顶部固定安装有安装件。
4、优选的,所述安装件的内部通过轴承转动安装有收卷辊,所述收卷辊的一端贯穿安装件且延伸至外部,所述收卷辊的一端键槽连接有第二电机,所述第二电机与安装件之间为固定安装。
5、优选的,所述收卷辊的外部设有绳索,所述绳索的一端固定连接有第一固定板,所述第一固定板的底部固定安装有第二固定板。
6、优选的,所述第一固定板的外部等距环形固定安装有第一安装座,且第一安装座的数量为四个,所述第二固定板的外部等距环形固定安装有第二安装座,且第二安装座的数量为四个,四个所述第二安装座的内部均转动安装有夹持爪。
7、优选的,四个所述第一安装座的内部均转动安装有电缸,四个所述电缸的一端均转动安装有第三安装座,所述第三安装座与夹持爪之间为固定安装。
8、与相关技术相比较,本实用新型提供的一种用于工业机器人的抓取装置具有如下有益效果:
9、当抓取装置需要抓取时,机器臂移动到合适的位置,通过第一电机的转动带动丝杆进行转动,丝杆转动有效的改变移动夹板的位置,使得移动夹板靠近固定夹板,通过移动夹板与固定夹板之间的配合,有效的将零部件进行抓取,结构简单,方便使用,且限位杆的设置,大大提高了移动夹板移动时的稳定性,避免移动夹板移动的过程中出现偏移,大大提高了实用性与安全性,方便对圆柱形零件进行夹持。
技术特征:
1.一种用于工业机器人的抓取装置,包括:机器臂(1),其特征在于:所述机器臂(1)的一端固定安装有固定架(2),所述固定架(2)的内部通过轴承转动安装有丝杆(3),所述丝杆(3)的一端贯穿固定架(2)且延伸至外部,所述丝杆(3)的一端键槽连接有第一电机(4),所述第一电机(4)与固定架(2)之间为固定安装,所述丝杆(3)的外部啮合连接有移动夹板(5),所述固定架(2)的内部且位于丝杆(3)的一侧固定安装有限位杆(6),所述移动夹板(5)与限位杆(6)之间为滑动安装,所述固定架(2)的外部一侧固定安装有固定夹板(7)。
2.根据权利要求1所述的一种用于工业机器人的抓取装置,其特征在于,所述固定架(2)的顶部固定安装有安装架(8),所述安装架(8)的顶部固定安装有安装件(9)。
3.根据权利要求2所述的一种用于工业机器人的抓取装置,其特征在于,所述安装件(9)的内部通过轴承转动安装有收卷辊(10),所述收卷辊(10)的一端贯穿安装件(9)且延伸至外部,所述收卷辊(10)的一端键槽连接有第二电机(11),所述第二电机(11)与安装件(9)之间为固定安装。
4.根据权利要求3所述的一种用于工业机器人的抓取装置,其特征在于,所述收卷辊(10)的外部设有绳索(12),所述绳索(12)的一端固定连接有第一固定板(13),所述第一固定板(13)的底部固定安装有第二固定板(14)。
5.根据权利要求4所述的一种用于工业机器人的抓取装置,其特征在于,所述第一固定板(13)的外部等距环形固定安装有第一安装座(15),且第一安装座(15)的数量为四个,所述第二固定板(14)的外部等距环形固定安装有第二安装座(16),且第二安装座(16)的数量为四个,四个所述第二安装座(16)的内部均转动安装有夹持爪(17)。
6.根据权利要求5所述的一种用于工业机器人的抓取装置,其特征在于,四个所述第一安装座(15)的内部均转动安装有电缸(19),四个所述电缸(19)的一端均转动安装有第三安装座(18),所述第三安装座(18)与夹持爪(17)之间为固定安装。
技术总结
本技术提供一种用于工业机器人的抓取装置,包括:机器臂,所述机器臂的一端固定安装有固定架,所述固定架的内部通过轴承转动安装有丝杆,所述丝杆的一端贯穿固定架且延伸至外部。本技术提供的一种用于工业机器人的抓取装置当抓取装置需要抓取时,机器臂移动到合适的位置,通过第一电机的转动带动丝杆进行转动,丝杆转动有效的改变移动夹板的位置,使得移动夹板靠近固定夹板,通过移动夹板与固定夹板之间的配合,有效的将零部件进行抓取,结构简单,方便使用,且限位杆的设置,大大提高了移动夹板移动时的稳定性,避免移动夹板移动的过程中出现偏移,大大提高了实用性与安全性,方便对圆柱形零件进行夹持。
技术研发人员:吴喜鹏,唐俊勇,游文斌,吴兴祥,刘泉,邓树军,邓图创,吴正伟
受保护的技术使用者:江门友文智造数字技术有限公司
技术研发日:20230830
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!