一种多轴机器人训练模块的制作方法
本技术涉及机器人应用领域,具体涉及一种多轴机器人训练模块。
背景技术:
1、工业机器人广泛使用在产业制造上,汽车制造、电器、食品等,能替代反复机器式操纵工作,而工厂进行生产加工时则需要通过三轴龙门滑台模组移动机器人对一些大型零件进行移动和装配。现有的运用在实际生产线中的三轴龙门机器人体型较为庞大,在操作时需要经验丰富的工程师进行操作:在移动和装配零部件时需要注意z轴的载荷和和x、y轴的行程范围;对于毫无操作经验的新手来说,操作不当会导致滑台模组产生晃动和磨损,甚至产生零部件之间的碰撞和人员伤亡等严重事故,因此教学时需要停止生产并配备专员进行教学和监督,严重影响生产效率。
技术实现思路
1、本实用新型的目的在于:为解决上述问题,本实用新型提供了一种多轴机器人训练模块。
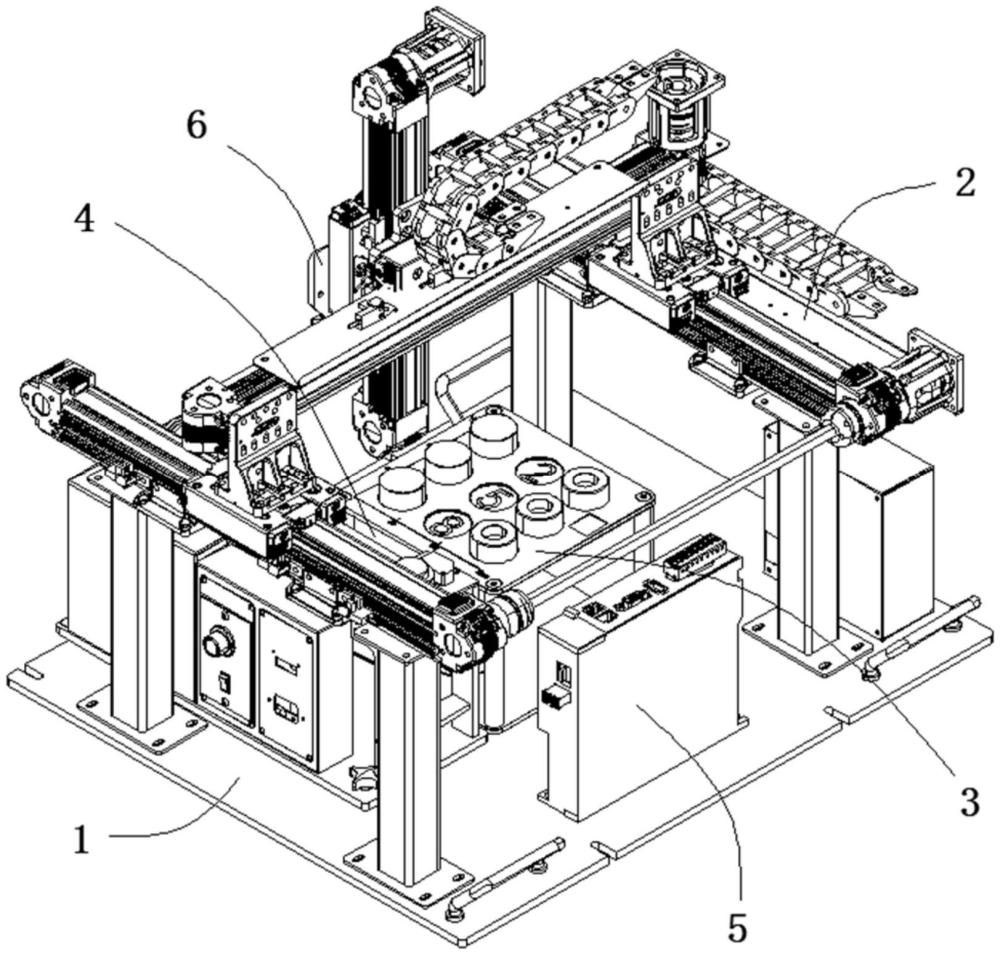
2、本实用新型为了实现上述目的具体采用以下技术方案,包括:承重组件,所述承重组件的支撑台上固定有支撑柱;
3、龙门组件,所述龙门组件包括直线滑台模组,所述直线滑台模组包含四个直线导轨,所述直线导轨上固定有滑台,所述直线导轨侧边设置有光电开关;
4、平面搬运组件,所述平面搬运组件包括顶板,所述顶板上设置用于放置样品的物料槽;
5、物料输送组件,所述物料输送组件包括驱动电机,所述驱动电机上方运输架设置有限位装置,所述限位装置上设置有传感器;
6、伺服驱动组件,所述伺服驱动组件设置有控制接口;
7、连接架,所述连接架固定于第四导轨的滑台上,所述连接架用于连接机器人夹具。
8、作为上述技术方案的进一步描述,所述直线导轨的两侧连接有同步轮,所述直线导轨上方设置有同步带。
9、作为上述技术方案的进一步描述,所述直线导轨包括第一导轨,第二导轨,第三导轨和第四导轨,所述第一导轨和第二导轨用于控制x轴方向的移动,所述第三导轨用于控制y轴方向的移动,所述第三导轨用于控制z轴方向的移动。
10、作为上述技术方案的进一步描述,所述第一导轨和第二导轨通过地脚平行的固定于支撑柱上,所述第一导轨和第二导轨的同步轮之间通过联轴器进行同步转动。
11、作为上述技术方案的进一步描述,所述第二导轨,第三导轨和第四导轨的联轴器外侧连接有电机安装法兰。
12、作为上述技术方案的进一步描述,所述第三导轨通过连接件固定于第二导轨上,所述第四导轨通过连接件固定于第四导轨上,所述第二和第三导轨一侧设置有拖链。
13、作为上述技术方案的进一步描述,所述拖链固定端采用内周安装,所述拖链移动端采用外周安装。
14、作为上述技术方案的进一步描述,所述顶板固定于底板上,所述物料槽底部设置有序号。
15、作为上述技术方案的进一步描述,所述驱动电机固定于支撑板上,所述驱动电机用于带动运输架内的传送带,所述驱动电机一侧连接有插线盒。
16、作为上述技术方案的进一步描述,所述控制接口包括三组,所述三组控制接口用于控制直线滑台模组的空间位置,移动速度和旋转转矩。
17、本实用新型的有益效果如下:
18、1、本实用新型,伺服驱动组件的控制接口设置有三组,可以分别控制直线滑台模组的空间位置,移动速度和旋转转矩,学员可以操控机器人夹具在空间内平稳的搬运和装配样品,为操作大型龙门吊装机器人提供了模拟经验。
19、为更清楚地阐述本实用新型的结构特征和作用,下面结合附图与具体实施例来对本实用新型进行详细说明。
技术特征:
1.一种多轴机器人训练模块,其特征在于,包括:承重组件(1),所述承重组件(1)的支撑台(11)上固定有支撑柱(12);
2.根据权利要求1所述的一种多轴机器人训练模块,其特征在于,所述直线导轨(211)的两侧连接有同步轮(214),所述直线导轨(211)上方设置有同步带(215)。
3.根据权利要求1所述的一种多轴机器人训练模块,其特征在于,所述直线导轨(211)包括第一导轨(2111),第二导轨(2112),第三导轨(2113)和第四导轨(2114),所述第一导轨(2111)和第二导轨(2112)用于控制x轴方向的移动,所述第三导轨(2113)用于控制y轴方向的移动,所述第三导轨(2113)用于控制z轴方向的移动。
4.根据权利要求3所述的一种多轴机器人训练模块,其特征在于,所述第一导轨(2111)和第二导轨(2112)通过地脚(216)平行的固定于支撑柱(12)上,所述第一导轨(2111)和第二导轨(2112)的同步轮(214)之间通过联轴器(217)进行同步转动。
5.根据权利要求3所述的一种多轴机器人训练模块,其特征在于,所述第二导轨(2112),第三导轨(2113)和第四导轨(2114)的联轴器(217)外侧连接有电机安装法兰(218)。
6.根据权利要求3所述的一种多轴机器人训练模块,其特征在于,所述第三导轨(2113)通过连接件(22)固定于第二导轨(2112)上,所述第四导轨(2114)通过连接件(22)固定于第四导轨(2114)上,所述第二和第三导轨(2113)一侧设置有拖链(23)。
7.根据权利要求6所述的一种多轴机器人训练模块,其特征在于,所述拖链(23)固定端采用内周安装,所述拖链(23)移动端采用外周安装。
8.根据权利要求1所述的一种多轴机器人训练模块,其特征在于,所述顶板(32)固定于底板(31)上,所述物料槽(34)底部设置有序号。
9.根据权利要求1所述的一种多轴机器人训练模块,其特征在于,所述驱动电机(42)固定于支撑板(41)上,所述驱动电机(42)用于带动运输架(43)内的传送带(44),所述驱动电机(42)一侧连接有插线盒(47)。
10.根据权利要求1所述的一种多轴机器人训练模块,其特征在于,所述控制接口(51)包括三组,所述三组控制接口(51)用于控制直线滑台模组(21)的空间位置,移动速度和旋转转矩。
技术总结
本技术公开了一种多轴机器人训练模块,包括:承重组件,其支撑台上固定有支撑柱;龙门组件,其直线滑台模组包含四个直线导轨,直线导轨上固定有滑台,直线导轨侧边设置有光电开关,第一导轨和第二导轨的同步轮之间通过联轴器进行同步转动,第二和第三导轨一侧设置有拖链;平面搬运组件,其顶板上设置用于放置样品的物料槽;物料输送组件,其运输架设置有限位装置和传感器,伺服驱动组件,其设置有多组控制接口。本技术的伺服驱动组件的控制接口设置有三组,可以分别控制直线滑台模组的空间位置,移动速度和旋转转矩,学员可以操控机器人夹具在空间内平稳的搬运和装配样品,为操作大型龙门吊装机器人提供了模拟经验。
技术研发人员:王伟,霰学会,王钰鹏
受保护的技术使用者:江苏海渡教育科技集团有限公司
技术研发日:20230901
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!