一种工件的承载装置的制作方法
本技术涉及承载装置领域,特别涉及一种工件的承载装置。
背景技术:
1、在对工件的拍照检测中,需要先将工件放置于承载台上,然后通过检测相机对工件进行拍照检测。
2、但是现有技术中的承载台的大小规格都是固定的,不能根据工件的大小,对承载的范围进行调节,从而使得工件的承载不够灵活,不能适应多种形状规格的工件,实用性较低。
技术实现思路
1、本实用新型的目的在于提供一种工件的承载装置,以解决上述背景技术中提出的问题。
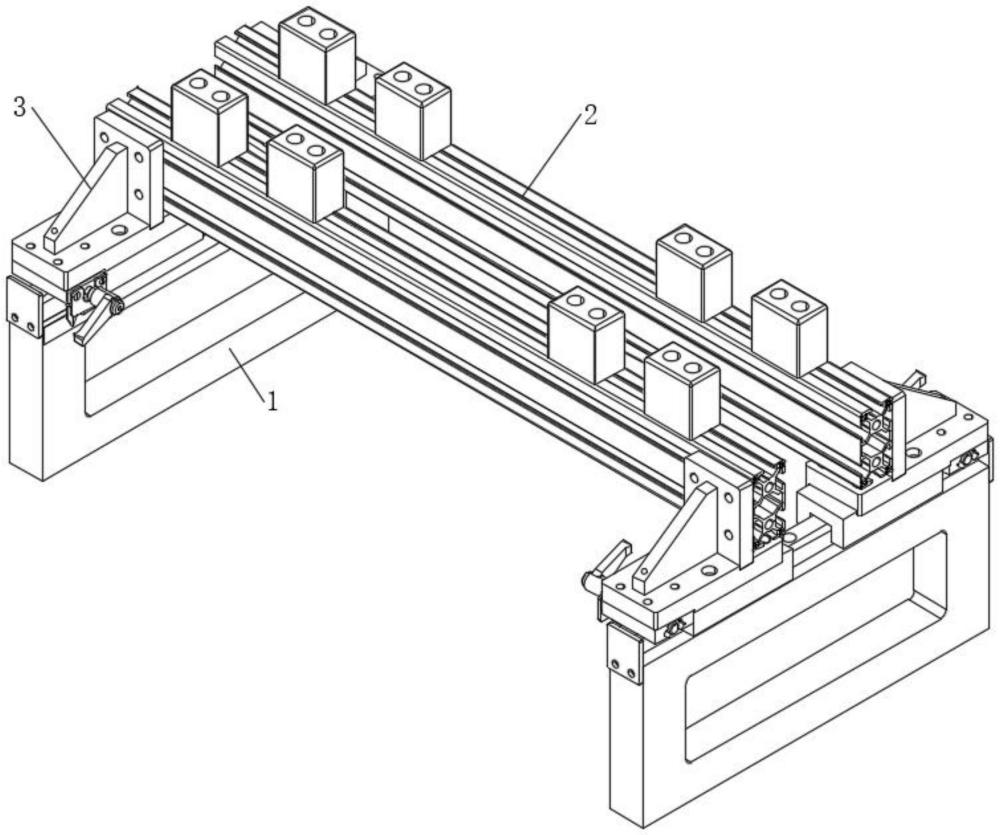
2、为实现上述目的,本实用新型提供如下技术方案:一种工件的承载装置,包括:
3、支撑机构,其呈竖直设置,多个所述支撑机构呈平行设置;
4、多个所述支撑机构的顶部承载有多个可调式承载机构,多个所述可调式承载机构呈平行设置,所述支撑机构与可调式承载机构呈垂直设置,所述可调式承载机构的两端均连接有移动机构,所述移动机构与支撑机构滑动连接,所述可调式承载机构用于对工件的承载。
5、优选的,所述可调式承载机构包括承载型架和承载块,多组所述承载组件安装于承载型架的顶部,每组所述承载组件包括两个承载块。
6、优选的,所述承载块的底端连接有滑块,所述滑块通过螺栓与承载块固定连接,所述滑块与承载型架的顶部滑动连接。
7、优选的,所述支撑机构包括支撑架、限位轨道和限位片,所述限位轨道连接于支撑架的顶端,所述限位轨道为长条形,两个所述限位片分别连接于限位轨道的两端。
8、优选的,所述限位轨道上等距开设有多个定位孔,所述支撑架的顶部等距开设有多个螺纹孔,所述定位孔的位置与螺纹孔的位置相对应。
9、优选的,所述移动机构包括横板和竖板,所述横板的底端固定连接有滑架,所述滑架与限位轨道滑动连接,所述竖板固定安装于横板的顶部,所述横板与紧固件之间通过加强筋连接。
10、优选的,所述滑架的一侧螺纹穿插连接有紧固件,所述紧固件与限位轨道相互贴合。
11、本实用新型的技术效果和优点:
12、本实用新型利用可调式承载机构和移动机构相配合的设置方式,拉动承载块进行滑动,使得承载块带动滑块,在承载型架的内部进行滑动,实现对承载块与承载型架之间相对位置的调节,从而使得两个承载块之间的距离适应工件的长度距离,然后通过滑动承载型架,使得滑架在限位轨道的限位下进行滑动,从而使得两个承载型架之间的距离适应工件的宽度距离,从而便可对承载块的位置进行两个维度上的调节,以适应不同规格大小的工件,使得工件的承载更加灵活,实用性更高。
技术特征:
1.一种工件的承载装置,包括:
2.根据权利要求1所述的一种工件的承载装置,其特征在于,所述可调式承载机构(2)包括承载型架(21)和承载组件,多组所述承载组件安装于承载型架(21)的顶部,每组所述承载组件包括两个承载块(22)。
3.根据权利要求2所述的一种工件的承载装置,其特征在于,所述承载块(22)的底端连接有滑块,所述滑块通过螺栓与承载块(22)固定连接,所述滑块与承载型架(21)的顶部滑动连接。
4.根据权利要求1所述的一种工件的承载装置,其特征在于,所述支撑机构(1)包括支撑架(11)、限位轨道(12)和限位片(13),所述限位轨道(12)连接于支撑架(11)的顶端,所述限位轨道(12)为长条形,两个所述限位片(13)分别连接于限位轨道(12)的两端。
5.根据权利要求4所述的一种工件的承载装置,其特征在于,所述限位轨道(12)上等距开设有多个定位孔(121),所述支撑架(11)的顶部等距开设有多个螺纹孔,所述定位孔(121)的位置与螺纹孔的位置相对应。
6.根据权利要求1所述的一种工件的承载装置,其特征在于,所述移动机构(3)包括横板(31)和竖板(33),所述横板(31)的底端固定连接有滑架,所述滑架与限位轨道(12)滑动连接,所述竖板(33)固定安装于横板(31)的顶部,所述横板(31)与紧固件(32)之间通过加强筋连接。
7.根据权利要求6所述的一种工件的承载装置,其特征在于,所述滑架的一侧螺纹穿插连接有紧固件(32),所述紧固件(32)与限位轨道(12)相互贴合。
技术总结
本技术公开了一种工件的承载装置,包括:支撑机构,其呈竖直设置,多个支撑机构呈平行设置;多个支撑机构的顶部承载有多个可调式承载机构,支撑机构与可调式承载机构呈垂直设置,可调式承载机构的两端均连接有移动机构,移动机构与支撑机构滑动连接,可调式承载机构用于对工件的承载。本技术利用可调式承载机构和移动机构相配合的设置方式,拉动承载块进行滑动,实现对承载块与承载型架之间相对位置的调节,从而使得两个承载块之间的距离适应工件的长度距离,使得滑架在限位轨道的限位下进行滑动,从而使得两个承载型架之间的距离适应工件的宽度距离,从而便可对承载块的位置进行两个维度上的调节。
技术研发人员:张俊峰,王士对,陈伟文,叶长春
受保护的技术使用者:常州超音速智能装备有限公司
技术研发日:20230901
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!