一种腕臂结构及机器人的制作方法
本申请涉及仿生机器人,尤其涉及一种腕臂结构及机器人。
背景技术:
1、仿生机器人在医疗、制造等领域有越来越多的应用,可进行手术操作、机械制造等动作。
2、然而,现有仿生机器人的手腕结构仅能实现较为简单的上下摆动,灵活性较弱,已无法满足目前的生产应用需要。
技术实现思路
1、本申请提供了一种腕臂结构及机器人,以提升腕臂结构的灵活性。
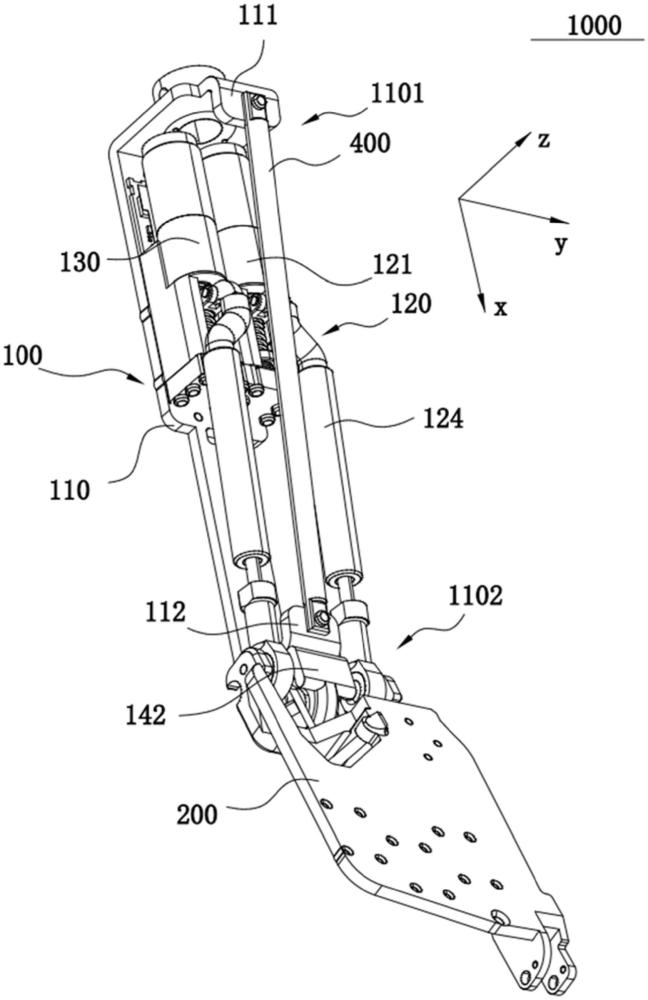
2、本申请提供了一种腕臂结构,包括:
3、小臂,包括安装架、第一伸缩机构和第二伸缩机构,所述安装架包括第一端和第二端,所述第一伸缩机构和所述第二伸缩机构并列安装于所述第一端并延伸至所述第二端;
4、承载板,包括依次并列设置的第一连接臂、第三连接臂和第二连接臂,所述第三连接臂万向枢接于所述第二端,所述第一连接臂与所述第一伸缩机构靠近所述第二端的一端万向枢接,所述第二连接臂与所述第二伸缩机构靠近所述第二端的一端万向枢接。
5、基于以上技术方案,将腕臂结构应用于机器人中时,安装架的第一端可连接于机器人的大臂,承载板可用于安装机器人的手掌。动作过程中,可通过调整第一伸缩机构和第二伸缩机构的伸缩长度,可带动承载板进行不同的动作。具体地,当第一伸缩机构和第二伸缩机构的伸缩长度不同时,可驱使承载板带动手掌进行左右摆动。当第一伸缩机构和第二伸缩机构同步动作,且伸缩长度一致时,可驱动承载板带动手掌进行上下摆动,即可模拟人体手掌的动作,更加具有灵活性。
6、在一些可能的实施方式中,所述第一伸缩机构包括传动连接的驱动件和传动杆组件,所述驱动件安装于所述第一端,所述传动杆组件延伸至所述第二端并与所述第一连接臂万向枢接。
7、在一些可能的实施方式中,所述驱动件为电机,所述第一伸缩机构还包括丝杆和转接座;
8、所述丝杆转动安装于所述安装架,并连接于所述驱动件的输出端;
9、所述转接座套设于所述丝杆上,并与所述丝杆螺纹配合连接,所述传动杆组件远离所述第一连接臂的一端铰接于所述转接座。
10、在一些可能的实施方式中,所述传动杆组件包括第一转接头、套筒、伸缩杆和第二转接头;
11、所述第一转接头的一端传动连接于所述驱动件的输出端,所述第一转接头远离所述驱动件的一端与所述套筒固定连接;
12、所述伸缩杆的一端浮动安装于所述套筒中,所述伸缩杆的另一端相对于套筒远离所述第一转接头的一端伸缩设置;
13、所述第二转接头连接于所述伸缩杆远离所述第一转接头的一端,所述第二转接头远离所述伸缩杆的一端与所述第一连接臂万向枢接。
14、在一些可能的实施方式中,所述伸缩杆靠近所述第一转接头的一端周侧凸出设置有第一凸缘,所述套筒远离所述第一转接头一端的内壁凸出设置有第二凸缘;
15、所述传动杆组件还包括第一弹性件和第二弹性件,所述第一弹性件抵接于所述第一转接头与所述第一凸缘之间,所述第二弹性件套设于所述伸缩杆上并抵接于所述第一凸缘和所述第二凸缘之间。
16、在一些可能的实施方式中,所述第一连接臂靠近所述第一伸缩机构的一端连接有第一连接轴,所述第一连接轴与所述第一伸缩机构之间通过第一关节轴承万向枢接。
17、在一些可能的实施方式中,所述第三连接臂包括两间隔相对的连接板,两所述连接板之间连接有第二连接轴;
18、所述第二端远离所述第一端的一侧还连接有转接套,所述转接套套设于所述第二连接轴,所述转接套与所述第二连接轴之间设置有第二关节轴承。
19、在一些可能的实施方式中,所述第二关节轴承与两所述连接板之间均夹设有垫片。
20、在一些可能的实施方式中,所述腕臂结构还包括支撑杆,所述支撑杆连接于所述第一端与所述第二端之间。
21、另外,本申请还提供了一种机器人,包括如上各实施方式中提供的所述腕臂结构。
技术特征:
1.一种腕臂结构,其特征在于,包括:
2.根据权利要求1所述的腕臂结构,其特征在于,所述第一伸缩机构包括传动连接的驱动件和传动杆组件,所述驱动件安装于所述第一端,所述传动杆组件延伸至所述第二端并与所述第一连接臂万向枢接。
3.根据权利要求2所述的腕臂结构,其特征在于,所述驱动件为电机,所述第一伸缩机构还包括丝杆和转接座;
4.根据权利要求2或3所述的腕臂结构,其特征在于,所述传动杆组件包括第一转接头、套筒、伸缩杆和第二转接头;
5.根据权利要求4所述的腕臂结构,其特征在于,所述伸缩杆靠近所述第一转接头的一端周侧凸出设置有第一凸缘,所述套筒远离所述第一转接头一端的内壁凸出设置有第二凸缘;
6.根据权利要求1所述的腕臂结构,其特征在于,所述第一连接臂靠近所述第一伸缩机构的一端连接有第一连接轴,所述第一连接轴与所述第一伸缩机构之间通过第一关节轴承万向枢接。
7.根据权利要求1或6所述的腕臂结构,其特征在于,所述第三连接臂包括两间隔相对的连接板,两所述连接板之间连接有第二连接轴;
8.根据权利要求7所述的腕臂结构,其特征在于,所述第二关节轴承与两所述连接板之间均夹设有垫片。
9.根据权利要求1所述的腕臂结构,其特征在于,所述腕臂结构还包括支撑杆,所述支撑杆连接于所述第一端与所述第二端之间。
10.一种机器人,其特征在于,包括如权利要求1至9任一项所述的腕臂结构。
技术总结
本申请公开了一种腕臂结构及机器人,涉及仿生机器人技术领域。腕臂结构包括小臂和承载板;小臂包括安装架、第一伸缩机构和第二伸缩机构,所述安装架包括第一端和第二端,所述第一伸缩机构和所述第二伸缩机构并列安装于所述第一端并延伸至所述第二端;承载板包括依次并列设置的第一连接臂、第三连接臂和第二连接臂,所述第三连接臂万向枢接于所述第二端,所述第一连接臂与所述第一伸缩机构靠近所述第二端的一端万向枢接,所述第二连接臂与所述第二伸缩机构靠近所述第二端的一端万向枢接。本申请提供的腕臂结构可提升机器人手掌动作的灵活性。
技术研发人员:钱光跃,刘乐锋,索文豪,房雄远,梁忠浩
受保护的技术使用者:深圳市优世界机器人有限公司
技术研发日:20230927
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!