机械臂控制方法及主从控制系统与流程
本公开属于机械臂,更具体地说,是涉及一种机械臂控制方法及主从控制系统。
背景技术:
1、机械臂在企业生产过程中已得到了广泛应用。在机械臂使用之前,需要采用手操器或触摸屏等操控终端,对机械臂的工作轨迹逐轴点动完成示教、编程,形成运行程序下载到机械臂控制器。这个工作对操控者本身技能要求较高,缺乏技术人员的生产企业难以进行操作及维护,而且示教用时较长,控制效果难以保证。
技术实现思路
1、本公开的目的在于提供一种机械臂控制方法及主从控制系统,不仅提高了机械臂控制的便利性,而且提高了控制效果。
2、本公开实施例的第一方面,提供了一种机械臂控制方法,包括:
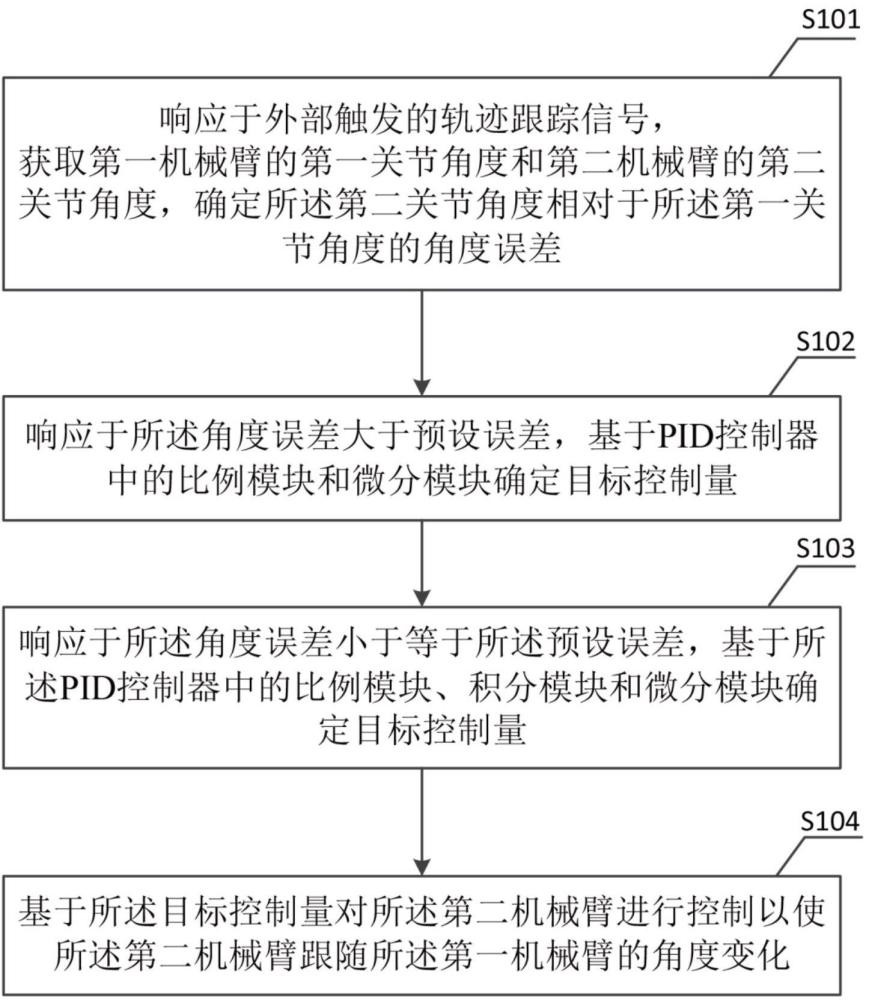
3、响应于外部触发的轨迹跟踪信号, 获取第一机械臂的第一关节角度和第二机械臂的第二关节角度,确定所述第二关节角度相对于所述第一关节角度的角度误差;
4、响应于所述角度误差大于预设误差,基于pid控制器中的比例模块和微分模块确定目标控制量;
5、响应于所述角度误差小于等于所述预设误差,基于所述pid控制器中的比例模块、积分模块和微分模块确定目标控制量;
6、基于所述目标控制量对所述第二机械臂进行控制以使所述第二机械臂跟随所述第一机械臂的角度变化。
7、本公开实施例的第二方面,提供了一种机械臂控制装置,包括:
8、数据获取单元,用于响应于外部触发的轨迹跟踪信号, 获取第一机械臂的第一关节角度和第二机械臂的第二关节角度,确定所述第二关节角度相对于所述第一关节角度的角度误差;
9、第一计算单元,用于响应于所述角度误差大于预设误差,基于pid控制器中的比例模块和微分模块确定目标控制量;
10、第二计算单元,用于响应于所述角度误差小于等于所述预设误差,基于所述pid控制器中的比例模块、积分模块和微分模块确定目标控制量;
11、跟踪控制单元,用于基于所述目标控制量对所述第二机械臂进行控制以使所述第二机械臂跟随所述第一机械臂的角度变化。
12、本公开实施例的第三方面,提供了一种主从控制系统,包括:
13、运动控制器以及多组机械臂;
14、每组机械臂都包含第一机械臂和第二机械臂;
15、所述运动控制器中存储有计算机程序,所述运动控制器执行所述计算机程序时实现上述的机械臂控制方法的步骤。
16、本公开实施例的第四方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述的机械臂控制方法的步骤。
17、本公开实施例提供的机械臂控制方法及主从控制系统的有益效果在于:
18、本公开实施例中,第一机械臂和第二机械臂的结构相同,且均由多个关节组成。第一机械臂可以由人工操控,当人工拖动第一机械臂运动时,首先检测第一机械臂的每个关节的关节角度,也即第一关节角度,然后基于pid控制器控制第二机械臂的对应关节运动,以使第二关节角度跟踪对应第一关节角度的变化。多个第一关节角度的变化数据也可以保存起来,后续根据第一关节角度的变化数据控制第二机械臂运行即可,这样,无需人工编程,通过人工拖动第一机械臂即可实现第二机械臂的控制,提高了机械臂控制的便利性。
19、同时,为了提高第二机械臂的动态性能,防止跟踪过程中的过冲,本公开实施例在第二关节角度和第一关节角度之间的角度误差大于预设误差时,仅基于比例模块和微分模块进行pid控制,反之,当第二关节角度和第一关节角度之间的角度误差小于等于预设误差时,加入积分模块。这样的控制方法既能保证跟踪的快速性,又能消除静态误差,保证系统的稳定性,从而提高了机械臂的控制效果。
技术特征:
1.一种机械臂控制方法,其特征在于,包括:
2.如权利要求1所述的机械臂控制方法,其特征在于,还包括:
3.如权利要求2所述的机械臂控制方法,其特征在于,还包括:
4.如权利要求1至3任一项所述的机械臂控制方法,其特征在于,还包括:
5.如权利要求2所述的机械臂控制方法,其特征在于,还包括:
6.如权利要求5所述的机械臂控制方法,其特征在于,还包括:
7.如权利要求5所述的机械臂控制方法,其特征在于,还包括:
8.一种主从控制系统,其特征在于,包括:
技术总结
本公开提供了一种机械臂控制方法及主从控制系统,该方法包括:响应于外部触发的轨迹跟踪信号,获取第一机械臂的第一关节角度和第二机械臂的第二关节角度,确定所述第二关节角度相对于所述第一关节角度的角度误差;响应于所述角度误差大于预设误差,基于PID控制器中的比例模块和微分模块确定目标控制量;响应于所述角度误差小于等于所述预设误差,基于所述PID控制器中的比例模块、积分模块和微分模块确定目标控制量;基于所述目标控制量对所述第二机械臂进行控制以使所述第二机械臂跟随所述第一机械臂的角度变化。本公开提供的机械臂控制方法及主从控制系统不仅提高了机械臂控制的便利性,而且提高了控制效果。
技术研发人员:陈宁,王连贤,丁洪旗,王东,部东双,许兴,杨雪松,张勇
受保护的技术使用者:唐山先坤工业机器人有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!