一种可侧摆的欠驱动灵巧手
本发明涉及机器人,具体是一种可侧摆的欠驱动灵巧手。
背景技术:
1、随着机器人技术在建筑、医疗、航天、工厂制造行业的大力发展,作为机器人末端执行器之一的仿人灵巧手受到的关注越来越多,特别是在医疗康复和义肢领域,应用价值极大。近年来,对仿人灵巧手进行了很多研究,提出了各种不同控制和驱动方式的产品,但该领域仍然存在不少未解决的问题。
2、按驱动方式分,可将机器人灵巧手分为欠驱动灵巧手和全驱动灵巧手两种类型,全驱动灵巧手具有每个关节独立驱动的优势,能够实现高度的灵活性和精确控制,但是它的结构和控制相对复杂,制造成本较高,且一般体积较大、重量重,难以实现小型化设计。相较于全驱动灵巧手,欠驱动灵巧手具有结构更为简单、体积与质量小、节省成本和控制也更加容易实现的优点。
3、现有的欠驱动灵巧手很多不具有侧摆自由度,仅能使手指进行简单的伸展和屈曲动作,包络抓取效果差;且大多成本高昂,控制系统繁杂。现有的欠驱动灵巧手的驱动装置要么集成在手掌中,不符合人体手部尺寸大小;要么集成在手臂中,限制手臂内部空间。
4、因此,亟需一种可侧摆的欠驱动灵巧手来解决上述问题。
技术实现思路
1、本发明实施例的目的在于提供一种可侧摆的欠驱动灵巧手,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
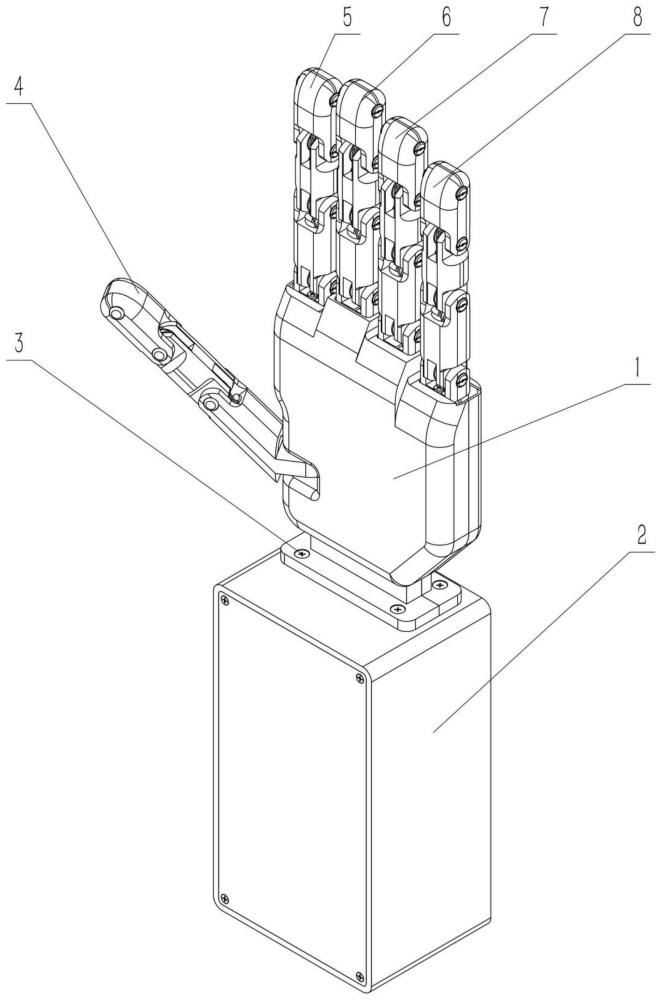
3、一种可侧摆的欠驱动灵巧手,包括手掌、驱动集成箱和五根手指,所述手掌底部与驱动集成箱顶部连接,所述五根手指设于手掌上,所述五根手指包括:拇指、食指、中指、无名指和小指,其中,所述食指与所述小指结构一致,所述中指与所述无名指结构一致;
4、所述手掌内设有:一组第一侧摆机构和两组第二侧摆机构,所述第一侧摆机构一端与手掌连接,另一端与拇指连接,用于带动拇指在一定角度内发生侧摆,两组所述第二侧摆机构一端与手掌连接,另一端分别与食指和小指连接,用于带动食指和小指在一定角度内发生侧摆;
5、所述驱动集成箱内部设有五组结构相同的屈伸机构,五组所述屈伸机构包括:拇指屈伸机构、食指屈伸机构、中指屈伸机构、无名指屈伸机构和小指屈伸机构,五组所述屈伸机构一端均与驱动集成箱连接,另一端分别与拇指、食指、中指、无名指和小指连接,分别用于带动拇指、食指、中指、无名指和小指进行屈伸。
6、作为本发明进一步的方案:所述手掌包括:前手掌盖板、手掌支架和后手掌盖板,所述手掌支架设于前手掌盖板与后手掌盖板之间,且前手掌盖板、手掌支架和后手掌盖板三者固定连接在一起。
7、作为本发明进一步的方案:所述拇指包括:拇指远指节、拇指近指节、拇指基指节、两组滑轮以及两组复位扭簧;所述侧摆拇指近指节顶端通过子母销一与拇指远指节转动连接,所述子母销一上套设有复位扭簧,该所述复位扭簧两端分别与拇指近指节、拇指远指节抵接;所述拇指近指节底端通过子母销一与拇指基指节转动连接,所述子母销一上套设有复位扭簧,该所述复位扭簧两端分别与拇指近指节、拇指基指节抵接;所述拇指基指节通过键与第一侧摆机构连接;所述拇指远指节顶部转动设有子母销一,该所述子母销一与拇指屈伸机构连接。
8、作为本发明进一步的方案:所述食指和所述小指均包括:远指节、中指节、近指节、侧摆基指节、三组滑轮以及三组复位扭簧;所述中指和所述无名指均包括:远指节、中指节、近指节、固定基指节、三组滑轮以及三组复位扭簧;
9、所述远指节底端与中指节一端通过子母销一转动连接,所述子母销一上套设有复位扭簧,该所述复位扭簧两端分别与远指节、中指节抵接;所述中指节另一端与近指节一端通过子母销一转动连接,所述子母销一上套设有复位扭簧,该所述复位扭簧两端分别与中指节、近指节抵接;
10、所述食指和小指上近指节另一端与侧摆基指节一端通过子母销一转动连接,所述子母销一上套设有复位扭簧,该所述复位扭簧两端分别与近指节、侧摆基指节抵接;所述中指和无名指上近指节另一端与固定基指节一端通过子母销一转动连接,所述所述子母销一上套设有复位扭簧,该所述复位扭簧两端分别与近指节、固定基指节抵接;四组所述远指节顶端均转动设有子母销一,该所述子母销一分别与一组所述屈伸机构连接;
11、所述侧摆基指节底端与子母销二固定连接,所述子母销二一端与手掌支架转动连接,另一端与前手掌盖板转动连接,所述子母销二与所述第二侧摆机构连接;所述固定基指节底端与手掌支架固定连接。
12、作为本发明进一步的方案:所述驱动集成箱包括:驱动集成箱前盖板、驱动集成箱后盖板和驱动集成箱箱体,所述驱动集成箱箱体设于驱动集成箱前盖板和驱动集成箱后盖板之间,且三者间固定连接,所述屈伸机构设于驱动集成箱箱体内部。
13、作为本发明进一步的方案:所述第一侧摆机构包括:侧摆直流电机和拇指转轴,所述侧摆直流电机与手掌支架连接,所述拇指转轴与侧摆直流电机输出端连接,所述拇指转轴与拇指基指节连接。
14、作为本发明进一步的方案:所述第二侧摆机构包括:侧摆直流电机、蜗杆和蜗轮,所述侧摆直流电机与手掌支架连接,所述侧摆直流电机输出端与蜗杆连接,所述蜗杆与蜗轮啮合,所述蜗轮与子母销二连接。
15、作为本发明进一步的方案:所述屈伸机构包括:腱绳、绳轮、滑轮和舵机,所述舵机通过螺丝二与驱动集成箱箱体连接,所述舵机输出端与绳轮连接,所述绳轮与腱绳一端连接,所述腱绳另一端与最高处所述子母销一连接,所述滑轮与子母销一连接。
16、与现有技术相比,本发明的有益效果是:
17、1、该灵巧手采用欠驱动方式,结构简单,质量较轻,价格便宜;采用相似于人手的尺寸设计;拇指、食指和小指设置了侧摆机构,增大了灵巧手的抓取范围,使得可抓取的物体形状更加丰富;
18、2、该灵巧手采用模块化思想,即将手掌、拇指和其余四指分别作为单独的模块进行设计和装配,极大程度上简化了装配流程,提高了零件的可替换性,延长该灵巧手的使用寿命;
19、3、手掌通过手掌盖板和手掌支架进行分层,使布线更为合理,防止腱绳打结,使手掌布局清晰,空间利用率有效提高;
20、4、将驱动装置分别布置在手掌内部以及驱动集成箱中,减小了手掌的尺寸大小,使该灵巧手尺寸类似于人手的尺寸;同时也使驱动集成箱保持在一个合适的尺寸大小。
技术特征:
1.一种可侧摆的欠驱动灵巧手,包括手掌、驱动集成箱和五根手指,所述手掌底部与驱动集成箱顶部连接,所述五根手指设于手掌上,其特征在于,
2.根据权利要求1所述的一种可侧摆的欠驱动灵巧手,其特征在于,所述手掌包括:前手掌盖板、手掌支架和后手掌盖板,所述手掌支架设于前手掌盖板与后手掌盖板之间,且前手掌盖板、手掌支架和后手掌盖板三者固定连接在一起。
3.根据权利要求2所述的一种可侧摆的欠驱动灵巧手,其特征在于,所述拇指包括:拇指远指节、拇指近指节、拇指基指节、两组滑轮以及两组复位扭簧;所述侧摆拇指近指节顶端通过子母销一与拇指远指节转动连接,所述子母销一上套设有复位扭簧,该所述复位扭簧两端分别与拇指近指节、拇指远指节抵接;所述拇指近指节底端通过子母销一与拇指基指节转动连接,所述子母销一上套设有复位扭簧,该所述复位扭簧两端分别与拇指近指节、拇指基指节抵接;所述拇指基指节通过键与第一侧摆机构连接;所述拇指远指节顶部转动设有子母销一,该所述子母销一与拇指屈伸机构连接。
4.根据权利要求3所述的一种可侧摆的欠驱动灵巧手,其特征在于,所述食指和所述小指均包括:远指节、中指节、近指节、侧摆基指节、三组滑轮以及三组复位扭簧;所述中指和所述无名指均包括:远指节、中指节、近指节、固定基指节、三组滑轮以及三组复位扭簧;
5.根据权利要求4所述的一种可侧摆的欠驱动灵巧手,其特征在于,所述驱动集成箱包括:驱动集成箱前盖板、驱动集成箱后盖板和驱动集成箱箱体,所述驱动集成箱箱体设于驱动集成箱前盖板和驱动集成箱后盖板之间,且三者间固定连接,所述屈伸机构设于驱动集成箱箱体内部。
6.根据权利要求2所述的一种可侧摆的欠驱动灵巧手,其特征在于,所述第一侧摆机构包括:侧摆直流电机和拇指转轴,所述侧摆直流电机与手掌支架连接,所述拇指转轴与侧摆直流电机输出端连接,所述拇指转轴与拇指基指节连接。
7.根据权利要求2所述的一种可侧摆的欠驱动灵巧手,其特征在于,所述第二侧摆机构包括:侧摆直流电机、蜗杆和蜗轮,所述侧摆直流电机与手掌支架连接,所述侧摆直流电机输出端与蜗杆连接,所述蜗杆与蜗轮啮合,所述蜗轮与子母销二连接。
8.根据权利要求5所述的一种可侧摆的欠驱动灵巧手,其特征在于,所述屈伸机构包括:腱绳、绳轮、滑轮和舵机,所述舵机通过螺丝二与驱动集成箱箱体连接,所述舵机输出端与绳轮连接,所述绳轮与腱绳一端连接,所述腱绳另一端与最高处所述子母销一连接,所述滑轮与子母销一连接。
技术总结
本发明公开了一种可侧摆的欠驱动灵巧手,涉及机器人技术领域,包括手掌、驱动集成箱和五根手指,手掌底部与驱动集成箱顶部连接,五根手指设于手掌上,五根手指包括:拇指、食指、中指、无名指和小指,其中,所述食指与所述小指结构一致,所述中指与所述无名指结构一致;手掌内设有:一组第一侧摆机构和两组第二侧摆机构;驱动集成箱内部设有五组结构相同的屈伸机构。本发明中对拇指、食指和小指都设置了侧摆机构,增大了灵巧手的抓取范围,使得可抓取的物体形状更加丰富,将驱动装置分别布置在手掌内部以及驱动集成箱中,减小了手掌的尺寸大小,使该灵巧手尺寸类似于人手的尺寸,同时也使驱动集成箱保持在一个合适的尺寸大小。
技术研发人员:李宪华,蔡钰,邱洵,杜鹏飞
受保护的技术使用者:安徽理工大学
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!