一种排爆机器人控制方法及系统与流程
本技术涉及智能控制,具体涉及一种排爆机器人控制方法及系统。
背景技术:
1、排爆机器人是一种专门设计用于处理爆炸物的机器人。现有的排爆机器人在进行排爆工作时都是操作人员通过控制台内,通过无线或有线的通讯方式在安全距离内远程控制机器人,以降低直接处理爆炸物的风险。然而,这种控制方法在当排爆机器人距离控制台较远时控制信号会受到影响,进而导致排爆机器人的排爆工作受到干扰。因此,如何减少排爆机器人进行排爆工作时对于远程控制的依赖,提高排爆机器人的自主性和适应性成为亟需解决的技术问题。
2、因此,亟需一种排爆机器人控制方法及系统来解决当前技术存在的问题。
技术实现思路
1、本技术提供了一种排爆机器人控制方法及系统,可以有效减少排爆机器人进行排爆工作时对于远程控制的依赖,提高排爆机器人的自主性和适应性。
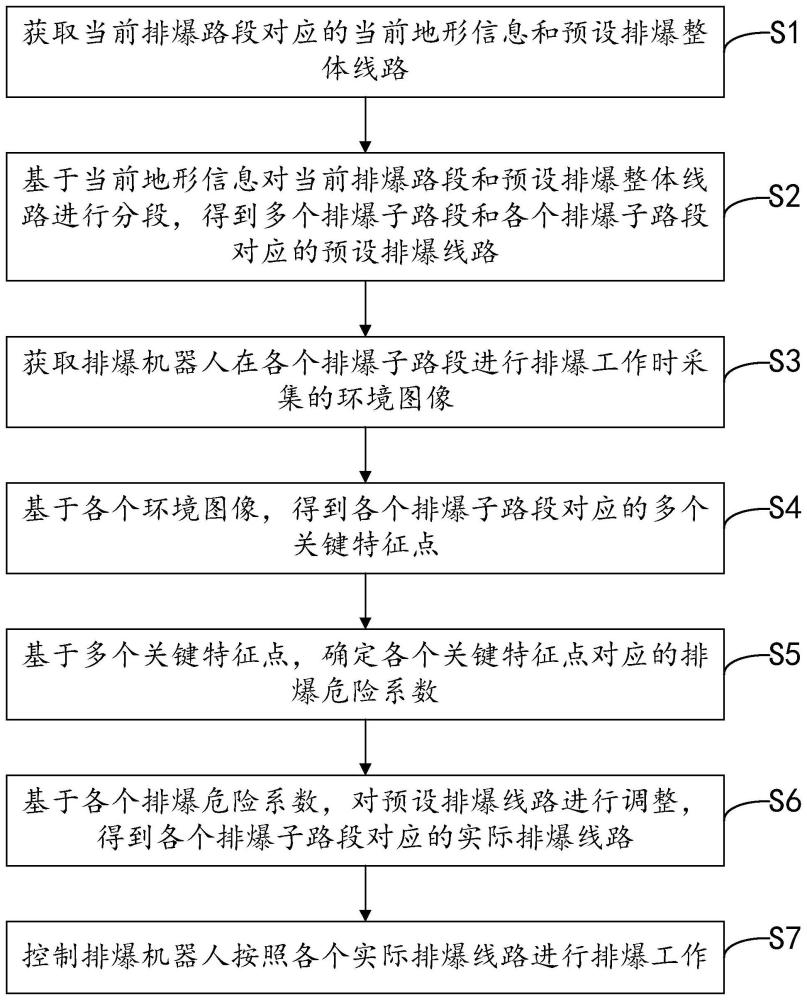
2、第一方面,本技术提供了一种排爆机器人控制方法,所述方法包括:获取当前排爆路段对应的当前地形信息和预设排爆整体线路;基于所述当前地形信息对所述当前排爆路段和所述预设排爆整体线路进行分段,得到多个排爆子路段和各个所述排爆子路段对应的预设排爆线路;获取排爆机器人在各个所述排爆子路段进行排爆工作时采集的环境图像;基于各个所述环境图像,得到各个所述排爆子路段对应的多个关键特征点;基于多个所述关键特征点,确定各个所述关键特征点对应的排爆危险系数;基于各个所述排爆危险系数,对所述预设排爆线路进行调整,得到各个所述排爆子路段对应的实际排爆线路;控制排爆机器人按照各个所述实际排爆线路进行排爆工作。
3、通过采用上述技术方案,通过获取当前排爆路段对应的当前地形信息和预设排爆整体线路,从而能够为排爆任务提供必要的环境背景和初始数据,并通过基于当前地形信息对当前排爆路段和预设排爆整体线路进行分段,从而能够更有效地管理和规划排爆任务;通过获取排爆机器人在各个排爆子路段进行排爆工作时采集的环境图像,并通过基于各个环境图像,得到各个排爆子路段对应的多个关键特征点,从而能够识别出潜在的风险和障碍,进而可以实时对地形信息进行风险评估,增强排爆计划的适应性和准确性;通过基于多个关键特征点,确定各个关键特征点对应的排爆危险系数,从而可以量化每个特征点的潜在风险;通过基于各个排爆危险系数,对预设排爆线路进行调整,得到各个排爆子路段对应的实际排爆线路,从而确保实际排爆线路是根据最新的风险评估和现场情况进行优化得到的,从而可以有效减少排爆机器人进行排爆工作时对于远程控制的依赖,提高排爆机器人的自主性和适应性。
4、可选的,所述基于所述当前地形信息对所述当前排爆路段和所述预设排爆整体线路进行分段,得到多个排爆子路段和各个所述排爆子路段对应的预设排爆线路,具体包括:将所述当前地形信息输入至地理信息系统进行分析,得到多个地形特征;基于多个所述地形特征和预设排爆任务需求,得到分段标准;基于所述分段标准对所述当前排爆路段进行分段,得到多个所述排爆子路段;基于所述当前排爆路段与所述预设排爆整体线路的对应关系,确定各个所述排爆子路段对应的预设排爆线路。
5、可选的,所述基于各个所述环境图像,得到各个所述排爆子路段对应的多个关键特征点,具体包括:对各个所述环境图像进行图像预处理,得到各个预处理环境图像;对各个所述预处理环境图像进行图像增强处理,得到各个检测图像;基于计算机视觉算法,从各个所述检测图像中提取多个环境特征;对多个所述环境特征进行识别,确定各个所述排爆子路段对应的多个关键特征;将多个所述关键特征在对应的所述排爆子路段进行精确标定,得到多个所述关键特征点。
6、可选的,所述基于多个所述关键特征点,确定各个所述关键特征点对应的排爆危险系数,具体包括:基于各个所述关键特征,确定各个所述关键特征点对应的特征点类型;对各个所述关键特征点进行轮廓识别,得到各个所述关键特征点对应的特征点面积;获取各个所述排爆子路段中已知危险区域对应的危险区域位置和各个所述关键特征点对应的特征点位置;基于各个所述特征点位置和所述危险区域位置,得到各个所述关键特征点对应的特征点相对位置;基于各个所述特征点类型、各个所述特征点面积以及各个所述特征点相对位置,计算得到各个所述关键特征点对应的排爆危险系数。
7、可选的,所述基于各个所述特征点类型、各个所述特征点面积以及各个所述特征点相对位置,计算得到各个所述关键特征点对应的排爆危险系数,具体包括:基于各个所述特征点类型,确定各个所述关键特征点对应的类型评分;基于各个所述特征点相对位置,确定各个所述关键特征点对应的相对位置评分;基于各个所述类型评分、各个所述特征点面积以及各个所述相对位置评分,计算得到各个所述关键特征点对应的排爆危险系数;通过以下公式计算得到所述排爆危险系数:c=αx+βln(y)+γz;其中,c为所述排爆危险系数,x为所述类型评分,y为所述特征点面积,z为所述相对位置评分,α为类型影响权重,β为面积影响权重,γ为相对位置影响权重。
8、通过采用上述技术方案,由于特征点面积可能跨越很大的范围,直接使用面积可能导致计算结果的极端差异或不平衡。因此,在计算时通过特征点面积取对数对特征点面积进行缩放,以便更有效地处理在不同数量级上的数据,从而可以减少大数据值的相对影响,同时增强小数据值的可见性。
9、可选的,所述基于各个所述排爆危险系数,对所述预设排爆线路进行调整,得到各个所述排爆子路段对应的实际排爆线路,具体包括:基于各个所述排爆危险系数,从多个所述关键特征点中筛选出多个潜在危险点;所述潜在危险点对应的排爆危险系数大于预设的危险系数阈值;判断全部所述潜在危险点是否均在所述预设排爆线路上;若存在至少一个所述潜在危险点不在所述预设排爆线路上时,获取各个所述潜在危险点对应的潜在危险点位置;基于各个所述潜在危险点对应的所述潜在危险点位置和所述排爆危险系数,得到各个所述潜在危险点对应的排爆优先级;基于各个所述排爆优先级和路径规划算法,生成所述实际排爆线路。
10、可选的,所述基于各个所述潜在危险点对应的所述潜在危险点位置和所述排爆危险系数,得到各个所述潜在危险点对应的排爆优先级,具体包括:获取排爆机器人的当前位置;基于所述当前位置和各个所述潜在危险点位置,确定各个所述潜在危险点与排爆机器人的间隔距离;基于各个所述排爆危险系数和各个所述间隔距离,计算得到各个所述潜在危险点对应的所述排爆优先级;通过以下公式计算得到各个所述潜在危险点对应的所述排爆优先级:
11、
12、其中,pi为第i个所述潜在危险点对应的所述排爆优先级,ci为第i个所述潜在危险点对应的所述排爆危险系数,max(c)为全部所述潜在危险点对应的排爆危险系数的最大值,min(c)为全部所述潜在危险点对应的排爆危险系数的最小值,di为第i个所述潜在危险点对应的所述间隔距离,max(d)为全部所述潜在危险点对应的间隔距离的最大值,min(d)为全部所述潜在危险点对应的间隔距离的最小值,w1为危险因素权重,w2为距离因素权重。
13、通过采用上述技术方案,通过筛选出危险系数高于预设阈值的关键特征点,从而能够集中资源和注意力在最可能存在风险的区域,减少不必要的排爆工作,提高整体操作的效率。通过判断是否所有潜在危险点都包含在预设排爆线路上,从而能够确保排爆计划的全面性和覆盖面,减少遗漏潜在危险区域的风险。在发现有潜在危险点不在预设排爆线路上时,通过获取这些点的具体位置,从而能够对排爆计划进行必要的调整,确保所有关键区域都得到适当处理。基于每个潜在危险点的位置和危险系数,计算排爆优先级,从而能够确定处理各个潜在危险点的顺序;并且在计算排爆优先级时通过排爆危险系数减去最小危险系数并除以最大和最小危险系数之差,将危险系数标准化到0和1之间,使得不同特征点间的危险系数可相互比较;并通过考虑特征点与排爆机器人当前位置或其他参考点之间的物理距离,并使用最大距离减去实际距离,并标准化,使得距离近的潜在危险点可以得到更高的分数,从而可以体现距离因素在排爆优先级中的相对重要性。最终基于排爆优先级和路径规划算法生成实际的排爆线路,从而确保排爆机器人进行排爆工作时可按照最优路径执行。
14、在本技术的第二方面提供了一种排爆机器人控制系统,所述系统包括获取模块、处理模块以及控制模块;所述获取模块,用于获取当前排爆路段对应的当前地形信息和预设排爆整体线路;所述处理模块,用于基于所述当前地形信息对所述当前排爆路段和所述预设排爆整体线路进行分段,得到多个排爆子路段和各个所述排爆子路段对应的预设排爆线路;所述获取模块,还用于获取排爆机器人在各个所述排爆子路段进行排爆工作时采集的环境图像;所述处理模块,还用于基于各个所述环境图像,得到各个所述排爆子路段对应的多个关键特征点;所述处理模块,还用于基于多个所述关键特征点,确定各个所述关键特征点对应的排爆危险系数;所述处理模块,还用于基于各个所述排爆危险系数,对所述预设排爆线路进行调整,得到各个所述排爆子路段对应的实际排爆线路;所述控制模块,用于控制排爆机器人按照各个所述实际排爆线路进行排爆工作。
15、在本技术的第三方面提供了一种电子设备,包括处理器、存储器、用户接口及网络接口,所述存储器用于存储指令,所述用户接口和网络接口用于给其它设备通信,所述处理器用于执行所述存储器中存储的指令,以使所述电子设备执行如本技术第一方面任意一项所述的方法。
16、在本技术的第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质存储有能够被处理器加载并执行如本技术第一方面任意一项所述的方法的计算机程序。
17、综上所述,本技术实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
18、1、通过获取当前排爆路段对应的当前地形信息和预设排爆整体线路,从而能够为排爆任务提供必要的环境背景和初始数据,并通过基于当前地形信息对当前排爆路段和预设排爆整体线路进行分段,从而能够更有效地管理和规划排爆任务;通过获取排爆机器人在各个排爆子路段进行排爆工作时采集的环境图像,并通过基于各个环境图像,得到各个排爆子路段对应的多个关键特征点,从而能够识别出潜在的风险和障碍,进而可以实时对地形信息进行风险评估,增强排爆计划的适应性和准确性;通过基于多个关键特征点,确定各个关键特征点对应的排爆危险系数,从而可以量化每个特征点的潜在风险;通过基于各个排爆危险系数,对预设排爆线路进行调整,得到各个排爆子路段对应的实际排爆线路,从而确保实际排爆线路是根据最新的风险评估和现场情况进行优化得到的,从而可以有效减少排爆机器人进行排爆工作时对于远程控制的依赖,提高排爆机器人的自主性和适应性。
19、2、由于特征点面积可能跨越很大的范围,直接使用面积可能导致计算结果的极端差异或不平衡。因此,在计算时通过特征点面积取对数对特征点面积进行缩放,以便更有效地处理在不同数量级上的数据,从而可以减少大数据值的相对影响,同时增强小数据值的可见性。
20、3、通过筛选出危险系数高于预设阈值的关键特征点,从而能够集中资源和注意力在最可能存在风险的区域,减少不必要的排爆工作,提高整体操作的效率。通过判断是否所有潜在危险点都包含在预设排爆线路上,从而能够确保排爆计划的全面性和覆盖面,减少遗漏潜在危险区域的风险。在发现有潜在危险点不在预设排爆线路上时,通过获取这些点的具体位置,从而能够对排爆计划进行必要的调整,确保所有关键区域都得到适当处理。基于每个潜在危险点的位置和危险系数,计算排爆优先级,从而能够确定处理各个潜在危险点的顺序;并且在计算排爆优先级时通过排爆危险系数减去最小危险系数并除以最大和最小危险系数之差,将危险系数标准化到0和1之间,使得不同特征点间的危险系数可相互比较;并通过考虑特征点与排爆机器人当前位置或其他参考点之间的物理距离,并使用最大距离减去实际距离,并标准化,使得距离近的潜在危险点可以得到更高的分数,从而可以体现距离因素在排爆优先级中的相对重要性。最终基于排爆优先级和路径规划算法生成实际的排爆线路,从而确保排爆机器人进行排爆工作时可按照最优路径执行。
- 还没有人留言评论。精彩留言会获得点赞!