一种绳驱敏捷机械臂多关节被动解耦机构
本发明属于机械臂领域,具体涉及一种绳驱敏捷机械臂多关节被动解耦机构。
背景技术:
1、应用于绳驱动的解耦机构是用于对驱动绳索解耦的机构。解耦机构主要分为主动解耦和被动解耦。为了完成更加精细的操作任务,被动解耦机构朝着高精度的方向发展,也造成被动解耦机构的结构越来越复杂、尺寸越来越大以及造价成本越来越高。目前被动解耦机构大多数为俯仰关节解耦,只能完成单关节绳索的解耦,难以满足敏捷机械臂的灵巧性要求。
技术实现思路
1、旨在至少解决现有技术中存在的技术问题之一,本发明提供一种绳驱敏捷机械臂多关节被动解耦机构,能够完成多关节绳索的结构,满足敏捷机械臂的灵巧性要求。
2、本发明的第一方面的实施例,一种绳驱敏捷机械臂多关节被动解耦机构,包括主轴、主动轮、随动轮、固定件、第一驱动绳索导线盘、第一解耦绳索导线盘、第二驱动绳索导线盘、第二解耦绳索导线盘、驱动绳索导向轮和解耦绳索导向轮;所述主动轮、所述随动轮、所述固定件、所述第一驱动绳索导线盘、所述第一解耦绳索导线盘、所述第二驱动绳索导线盘和所述第二解耦绳索导线盘分别连接于所述主轴,所述驱动绳索导向轮和所述解耦绳索导向轮设置于所述随动轮上;所述第一驱动绳索导线盘和所述第一解耦绳索导线盘通过第一连接件与所述主动轮连接,所述第二驱动绳索导线盘和所述第二解耦绳索导线盘通过第二连接件与所述固定件连接。
3、根据本发明的第一方面的某些实施例,所述主动轮由多条驱动线产生的力矩差所驱动。
4、根据本发明的第一方面的某些实施例,所述驱动线包括开阖线和收缩线,所述开阖线和所述收缩线分别位于所述主动轮的两边。
5、根据本发明的第一方面的某些实施例,所述开阖线和所述收缩线缠绕于驱动器,并且所述开阖线和所述收缩线在所述驱动器上的绕线方向相反。
6、根据本发明的第一方面的某些实施例,所述解耦机构还包括滑轮组,所述滑轮组包括用于导向驱动绳索的第一滑轮和用于导向解耦绳索的第二滑轮。
7、根据本发明的第一方面的某些实施例,所述驱动绳索依次穿设于所述第一驱动绳索导线盘、所述驱动绳索导向轮和所述第二驱动绳索导线盘。
8、根据本发明的第一方面的某些实施例,所述第一驱动绳索导线盘和所述第二驱动绳索导线盘均有多个,并且所述第一驱动绳索导线盘和所述第二驱动绳索导线盘的数量相同。
9、根据本发明的第一方面的某些实施例,所述驱动绳索导向轮包括导向轮轴和多个子导向轮,多个所述子导向轮安装于所述导向轮轴并且沿所述导向轮轴依次设置。
10、根据本发明的第一方面的某些实施例,所述解耦绳索依次穿设于所述第一解耦绳索导线盘、所述解耦绳索导向轮和所述第二解耦绳索导线盘。
11、本发明的第二方面的实施例,一种机械臂,设置有如上所述的绳驱敏捷机械臂多关节被动解耦机构。
12、本发明的有益效果包括:实现了回转关节解耦结构,简化了结构,进而能缩小解耦机构的尺寸以及造价成本,能够完成多关节绳索的结构,满足敏捷机械臂的灵巧性要求。
13、此外,本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
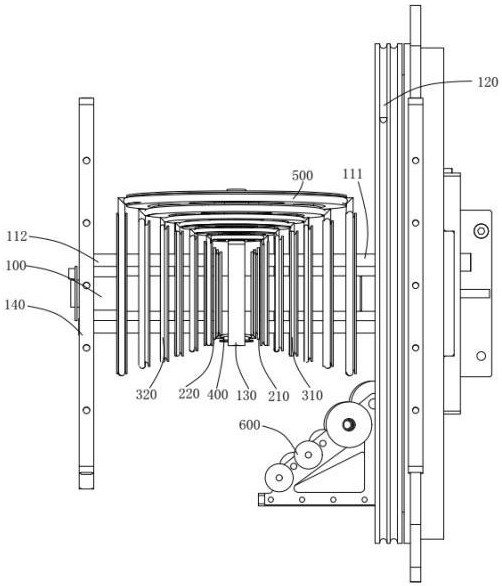
1.一种绳驱敏捷机械臂多关节被动解耦机构,其特征在于,包括主轴(100)、主动轮(120)、随动轮(130)、固定件(140)、第一驱动绳索导线盘(310)、第一解耦绳索导线盘(210)、第二驱动绳索导线盘(320)、第二解耦绳索导线盘(220)、驱动绳索导向轮(500)和解耦绳索导向轮(400);所述主动轮(120)、所述随动轮(130)、所述固定件(140)、所述第一驱动绳索导线盘(310)、所述第一解耦绳索导线盘(210)、所述第二驱动绳索导线盘(320)和所述第二解耦绳索导线盘(220)分别连接于所述主轴(100),所述驱动绳索导向轮(500)和所述解耦绳索导向轮(400)设置于所述随动轮(130)上;所述第一驱动绳索导线盘(310)和所述第一解耦绳索导线盘(210)通过第一连接件(111)与所述主动轮(120)连接,所述第二驱动绳索导线盘(320)和所述第二解耦绳索导线盘(220)通过第二连接件(112)与所述固定件(140)连接。
2.根据权利要求1所述的一种绳驱敏捷机械臂多关节被动解耦机构,其特征在于,所述主动轮(120)由多条驱动线产生的力矩差所驱动。
3.根据权利要求2所述的一种绳驱敏捷机械臂多关节被动解耦机构,其特征在于,所述驱动线包括开阖线和收缩线,所述开阖线和所述收缩线分别位于所述主动轮(120)的两边。
4.根据权利要求3所述的一种绳驱敏捷机械臂多关节被动解耦机构,其特征在于,所述开阖线和所述收缩线缠绕于驱动器,并且所述开阖线和所述收缩线在所述驱动器上的绕线方向相反。
5.根据权利要求1所述的一种绳驱敏捷机械臂多关节被动解耦机构,其特征在于,还包括滑轮组(600),所述滑轮组(600)包括用于导向驱动绳索(10)的第一滑轮和用于导向解耦绳索(20)的第二滑轮。
6.根据权利要求5所述的一种绳驱敏捷机械臂多关节被动解耦机构,其特征在于,所述驱动绳索(10)依次穿设于所述第一驱动绳索导线盘(310)、所述驱动绳索导向轮(500)和所述第二驱动绳索导线盘(320)。
7.根据权利要求6所述的一种绳驱敏捷机械臂多关节被动解耦机构,其特征在于,所述第一驱动绳索导线盘(310)和所述第二驱动绳索导线盘(320)均有多个,并且所述第一驱动绳索导线盘(310)和所述第二驱动绳索导线盘(320)的数量相同。
8.根据权利要求6所述的一种绳驱敏捷机械臂多关节被动解耦机构,其特征在于,所述驱动绳索导向轮(500)包括导向轮轴(520)和多个子导向轮(510),多个所述子导向轮(510)安装于所述导向轮轴(520)并且沿所述导向轮轴(520)依次设置。
9.根据权利要求5所述的一种绳驱敏捷机械臂多关节被动解耦机构,其特征在于,所述解耦绳索(20)依次穿设于所述第一解耦绳索导线盘(210)、所述解耦绳索导向轮(400)和所述第二解耦绳索导线盘(220)。
10.一种机械臂,其特征在于,所述机械臂设置有如权利要求1至9任一项所述的绳驱敏捷机械臂多关节被动解耦机构。
技术总结
本发明涉及一种绳驱敏捷机械臂多关节被动解耦机构,其中解耦机构包括主轴、主动轮、随动轮、固定件、第一驱动绳索导线盘、第一解耦绳索导线盘、第二驱动绳索导线盘、第二解耦绳索导线盘、驱动绳索导向轮和解耦绳索导向轮;主动轮、随动轮、固定件、第一驱动绳索导线盘、第一解耦绳索导线盘、第二驱动绳索导线盘和第二解耦绳索导线盘分别连接于主轴,驱动绳索导向轮和解耦绳索导向轮设置于随动轮上;第一驱动绳索导线盘和第一解耦绳索导线盘通过第一连接件与主动轮连接,第二驱动绳索导线盘和第二解耦绳索导线盘通过第二连接件与固定件连接;实现了回转关节解耦结构,简化了结构,并能完成多关节绳索的结构,满足敏捷机械臂的灵巧性要求。
技术研发人员:闫磊,李镇,梁斌,王学谦,徐文福
受保护的技术使用者:哈尔滨工业大学(深圳)(哈尔滨工业大学深圳科技创新研究院)
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!