一种机器人关节密封模组及其湿度控制方法与流程
本申请涉及机器人设备,特别涉及一种机器人关节密封模组。
背景技术:
1、机器人已经广泛应用在多个场景中,在一些特定的场景,如机床上下料中,由于机床内有切削液及油雾,对机器人的防护性及密封性提出了很高的要求。在没有足够密封性和防护性保护的机器人中,机床内的切削液、油雾等气液会进入机器人的内部,污染编码器、腐蚀电机及减速器,导致机器人的寿命缩短并带来产线停产。目前提高机器人的防护性和密封性,通常的方法是涂胶密封,这种方法质量难以控制,而且对后面的维护维修拆装困难。在医疗、半导体行业或者无尘车间等有洁净度要求的特定环境应用场合,还要求机器人自身不能对外部环境造成污染。市面上的机器人关节密封模组包括有谐波减速机,谐波减速机自身密封性不能完全保证内部润滑的物质不泄露,这种泄露现象时有发生,对机器人的应用场合造成破坏,影响机器人的使用安全及应用安全。
技术实现思路
1、本申请旨在至少解决现有技术中存在的技术问题之一。为此,本申请提出一种具有良好密封性能,能够对密封性进行检测的机器人关节密封模组。
2、本申请还提出了一种机器人关节密封模组的湿度控制方法。
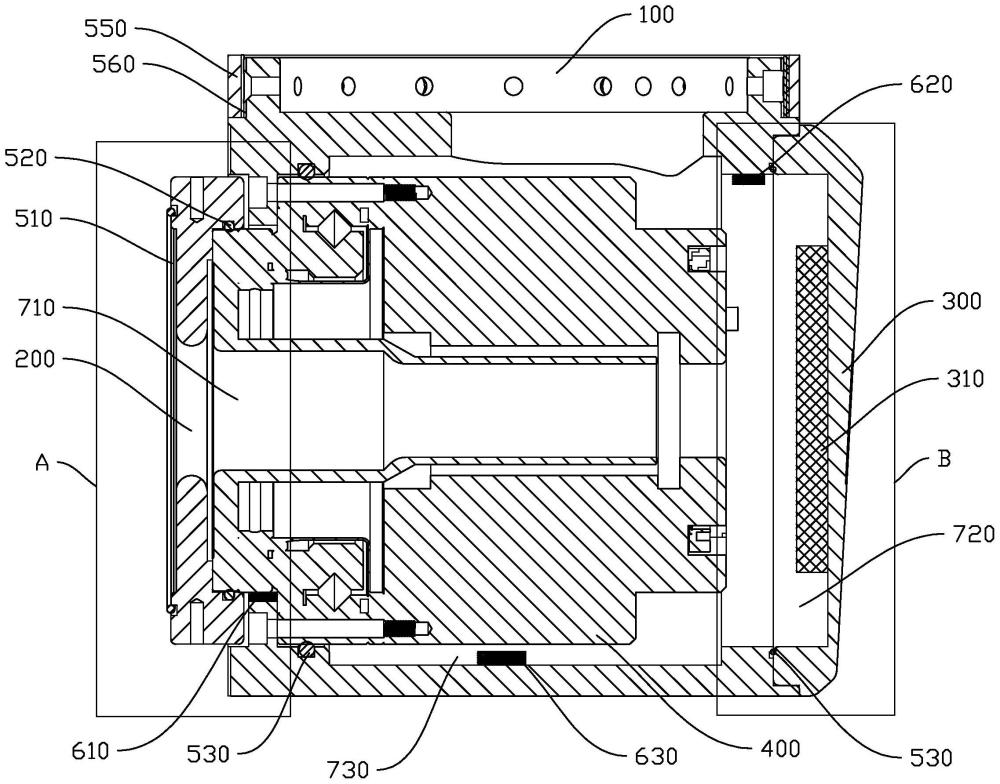
3、根据本申请的第一方面实施例的一种机器人关节密封模组,包括:
4、壳体,所述壳体内设置有电机,所述电机设置有加热升温模块;
5、法兰盘,所述法兰盘设置在所述壳体的一侧,所述法兰盘与所述电机配合形成第一腔室,所述第一腔室内设置有第一湿度传感器,所述法兰盘外侧设置有第一密封构件,所述法兰盘与所述电机之间设置有第二密封构件;
6、端盖,所述端盖设置在所述壳体的一侧,所述端盖与所述壳体配合形成第二腔室,所述端盖与所述壳体之间设置有第三密封构件,所述第二腔室内设置有第二湿度传感器,所述端盖内侧设置有吸湿材料;
7、其中,所述壳体内形成第三腔室,所述第三腔室内设置有第三湿度传感器和设置在所述电机与所述壳体之间的第四密封构件。
8、根据本申请第一方面实施例的一种机器人关节密封模组,至少具有如下有益效果:本申请的一种机器人关节密封模组,包括壳体、法兰盘和端盖,壳体内设置有电机,法兰盘与电机配合形成第一腔室,法兰盘外侧设置有第一密封构件,法兰盘与电机之间设置有第二密封构件,端盖与壳体之间设置有第三密封构件,壳体内形成第三腔室,第三腔室内设置有第四密封构件,第一密封构件、第二密封构件、第三密封构件和第四密封构件能够提高密封性能。第一腔室内设置有第一湿度传感器,第二腔室内设置有第二湿度传感器,电机设置有加热升温模块,端盖内侧设置有吸湿材料,第三腔室内设置有第三湿度传感器,第一湿度传感器、第二湿度传感器和第三湿度传感器能够对壳体内的密封性能进行检测,吸湿材料和加热升温模块能够降低壳体内的湿度,对机器人关节密封模组进行保护。
9、根据本申请的一些实施例,所述法兰盘的内侧设置有凹槽,所述第二密封构件设置在所述凹槽内。
10、根据本申请的一些实施例,所述壳体与所述电机的连接处设置有凹槽,所述第四密封构件设置在所述凹槽内。
11、根据本申请的一些实施例,所述壳体的端面设置有支撑护圈。
12、根据本申请的一些实施例,所述壳体外侧还设置有用于固定所述支撑护圈的第五密封构件。
13、根据本申请的一些实施例,所述端盖可拆卸安装在所述壳体上。
14、根据本申请的一些实施例,所述电机包括外壳和谐波减速机,所述谐波减速机安装在所述外壳内,所述谐波减速机设置有双重油封。
15、根据本申请的第一方面实施例的机器人关节密封模组的湿度控制方法,包括上述的一种机器人关节密封模组,还包括:
16、所述第一湿度传感器对所述第一腔室的湿度进行监控,得到第一腔室湿度值;
17、所述第二湿度传感器对所述第二腔室的湿度进行监控,得到第二腔室湿度值;
18、所述第三湿度传感器对所述第三腔室的湿度进行监控,得到第三腔室湿度值;
19、将所述第一腔室湿度值、所述第二腔室湿度值、所述第三腔室湿度值与额定湿度值进行比较;
20、当所述第一腔室湿度值、所述第二腔室湿度值和所述第三腔室湿度值均小于所述额定湿度值时,所述机器人关节密封模组正常进行工作;
21、当所述第一腔室湿度值大于等于所述额定湿度值和/或所述第二腔室湿度值大于等于所述额定湿度值且第三腔室湿度值小于所述额定湿度值时,所述机器人关节密封模组继续工作,开启所述电机的所述加热升温模块;
22、当所述第三腔室湿度值大于等于所述额定湿度值时,所述机器人关节密封模组停止工作,所述机器人关节密封模组调整姿态并离开作业环境。
23、根据本申请的一些实施例,还包括报警模块,所述报警模块包括用于显示所述第一腔室湿度值、所述第二腔室湿度值、所述第三腔室湿度值的显示部件。
24、根据本申请的一些实施例,所述额定湿度值为80%。
25、本申请的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实践了解到。
技术特征:
1.一种机器人关节密封模组,其特征在于,包括:
2.根据权利要求1所述的一种机器人关节密封模组,其特征在于,所述法兰盘的内侧设置有凹槽,所述第二密封构件设置在所述凹槽内。
3.根据权利要求1所述的一种机器人关节密封模组,其特征在于,所述壳体与所述电机的连接处设置有凹槽,所述第四密封构件设置在所述凹槽内。
4.根据权利要求1所述的一种机器人关节密封模组,其特征在于,所述壳体的端面设置有支撑护圈。
5.根据权利要求4所述的一种机器人关节密封模组,其特征在于,所述壳体外侧还设置有用于固定所述支撑护圈的第五密封构件。
6.根据权利要求1所述的一种机器人关节密封模组,其特征在于,所述端盖可拆卸安装在所述壳体上。
7.根据权利要求1所述的一种机器人关节密封模组,其特征在于,所述电机包括外壳和谐波减速机,所述谐波减速机安装在所述外壳内,所述谐波减速机设置有双重油封。
8.机器人关节密封模组的湿度控制方法,包括权利要求1至7任一所述的一种机器人关节密封模组,其特征在于,还包括:
9.根据权利要求8所述的机器人关节密封模组的湿度控制方法,其特征在于,还包括:
10.根据权利要求8所述的机器人关节密封模组的湿度控制方法,其特征在于,所述额定湿度值为80%。
技术总结
本申请公开了一种机器人关节密封模组及其湿度控制方法,包括壳体、法兰盘和端盖,壳体内设置有电机,法兰盘与电机配合形成第一腔室,法兰盘外侧设置有第一密封构件,法兰盘与壳体之间设置有第二密封构件,端盖与壳体之间设置有第三密封构件,壳体内形成第三腔室,第三腔室内设置有第四密封构件,第一密封构件、第二密封构件、第三密封构件和第四密封构件能够提高密封性能。电机设置有加热升温模块,端盖内侧设置有吸湿材料,第一湿度传感器、第二湿度传感器和第三湿度传感器能够对壳体内的密封性能进行检测,吸湿材料和加热升温模块能够降低壳体内的湿度,对机器人关节密封模组进行保护。
技术研发人员:李卫铳,王怀建,李卫燊
受保护的技术使用者:广州里工实业有限公司
技术研发日:
技术公布日:2024/4/22
- 还没有人留言评论。精彩留言会获得点赞!