一种机械臂抓取位置的预测方法、装置、设备及存储介质与流程
本申请涉及人工智能,尤其涉及一种机械臂抓取位置的预测方法、装置、设备及存储介质。
背景技术:
1、机械臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都得到了广泛的应用。
2、目前主流的机械臂方案采用视觉技术预测抓取位置。如何提高机械臂抓取位置的预测准确率是本申请所要解决的技术问题。
技术实现思路
1、本申请目的是提供一种机械臂抓取位置的预测方法、装置、设备及存储介质,能够提高机械臂抓取位置的预测准确率。
2、为了实现上述目的,本申请实施例是这样实现的:
3、第一方面,提供一种机械臂抓取位置的预测方法,包括:
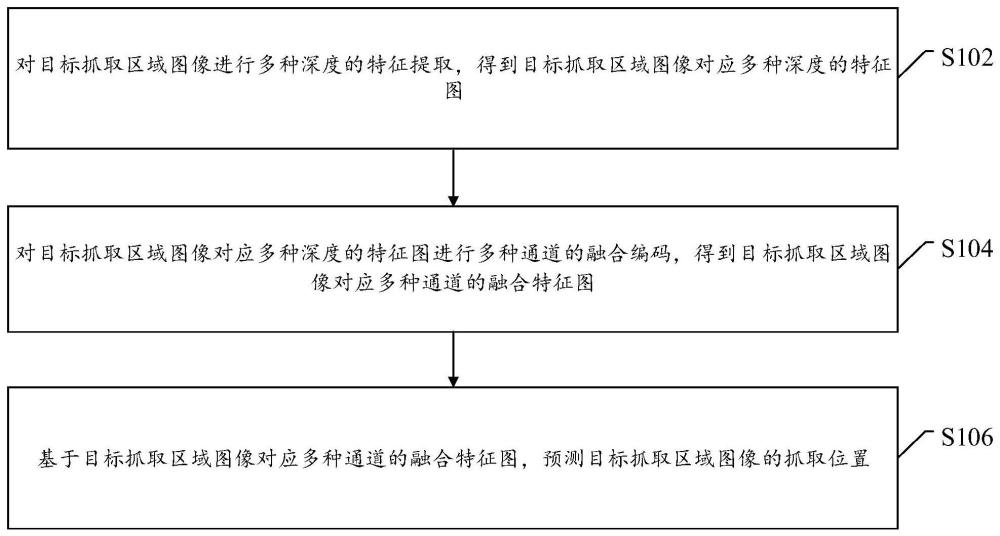
4、对目标抓取区域图像进行多种深度的特征提取,得到所述目标抓取区域图像对应所述多种深度的特征图;其中,不同深度的特征图表征有不同的特征信息;
5、对所述目标抓取区域图像对应所述多种深度的特征图进行多种通道的融合编码,得到所述目标抓取区域图像对应所述多种通道的融合特征图;其中,所述多个通道之间采用注意力机制,不同通道的融合特征图对应有不同的图像尺寸;
6、基于所述目标抓取区域图像对应所述多种通道的融合特征图,预测所述目标抓取区域图像的抓取位置。
7、第三方面,本申请实施例提供了一种电子设备,包括:处理器;以及,被配置为存储计算机可执行指令的存储器,所述计算机可执行指令在被执行时使所述处理器执行第一方面所述的方法。
8、第四方面,提供一种计算机可读存储介质,所述计算机可读存储介质用于存储计算机可执行指令,所述计算机可执行指令在被处理器执行时实现第一方面所述的方法。
9、本申请在预测机械臂的位置时,首先对机械臂当前的目标抓取区域图像进行多种深度的特征提取,不同深度的特征图表征有不同的特征信息。接下来,基于注意力机制的不同通道,对目标抓取区域图像对应所述多种深度的特征图进行多种通道的融合编码,每种通道的融合特征图对应有不同的图像尺寸,以基于注意力机制分析出各通道的融合特征图的重要性;最后,基于各通道的融合特征图和对应的重要性,以多种深度维度、多种视觉注意力来分析预测目标抓取区域图像的抓取位置,从而提高抓取位置的预测准确率。
技术特征:
1.一种机械臂抓取位置的预测方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,
3.根据权利要求1所述的方法,其特征在于,
4.根据权利要求3所述的方法,其特征在于,
5.根据权利要求4所述的方法,其特征在于,
6.根据权利要求1所述的方法,其特征在于,
7.根据权利要求6所述的方法,其特征在于,
8.一种机械臂抓取位置的预测装置,其特征在于,包括:
9.一种电子设备,包括:处理器;以及被安排成存储计算机可执行指令的存储器,其特征在于,所述可执行指令在被执行时使所述处理器执行以下操作:
10.一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如下步骤:
技术总结
本申请提供一种机械臂抓取位置的预测方法、装置、设备及存储介质。方法包括:对目标抓取区域图像进行多种深度的特征提取,得到所述目标抓取区域图像对应所述多种深度的特征图;其中,不同深度的特征图表征有不同的特征信息。对所述目标抓取区域图像对应所述多种深度的特征图进行多种通道的融合编码,得到所述目标抓取区域图像对应所述多种通道的融合特征图;其中,所述多个通道之间采用注意力机制,不同通道的融合特征图对应有不同的图像尺寸。基于所述目标抓取区域图像对应所述多种通道的融合特征图,预测所述目标抓取区域图像的抓取位置。本申请可以提高机械臂抓取位置的预测准确率。
技术研发人员:梅迪菲,曲若鹏,郝晓宁,田康,陈涛,刘瑜
受保护的技术使用者:中移雄安信息通信科技有限公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!