一种机器人定位的方法、装置及系统与流程
本技术涉及机器人,特别涉及一种机器人定位的方法、装置及系统。
背景技术:
1、随着光伏发电的普及,越来越多的人开始关注光伏面板的清洁问题。光伏清扫机器人是一种能够清洁光伏组件的机器人,它们可以快速、有效地清理光伏组件上的灰尘、污垢和其他杂质。在需要清扫的光伏组件中,一般都设有间隙(例如两光伏面板之间)。为了降低清扫机器人的数量投入、节约成本,通常采用桥架连接光伏组件串的方法,为机器人创造通行条件,从而可以使一台机器人完成清扫一排光伏面板的任务。
2、现有技术中,光伏清扫机器人针对自身位置的识别多采用信号或图像检测的方式,在定位时往往使用传感器。此种方法要求对传感器的布置、稳定性、模型训练都有较严格的需求,故在光伏清扫机器人复杂和恶劣的运行环境中的适应性不足。因此,如何简单、准确、高适应性地定位光伏清扫机器人,成为了一个亟需解决的问题。
技术实现思路
1、基于上述问题,本技术提供了一种机器人定位的方法、装置及系统,以简单、准确、高适应性地定位光伏清扫机器人。
2、本技术公开了一种机器人定位的方法,所述机器人配置有无线信号收发装置,所述方法包括:
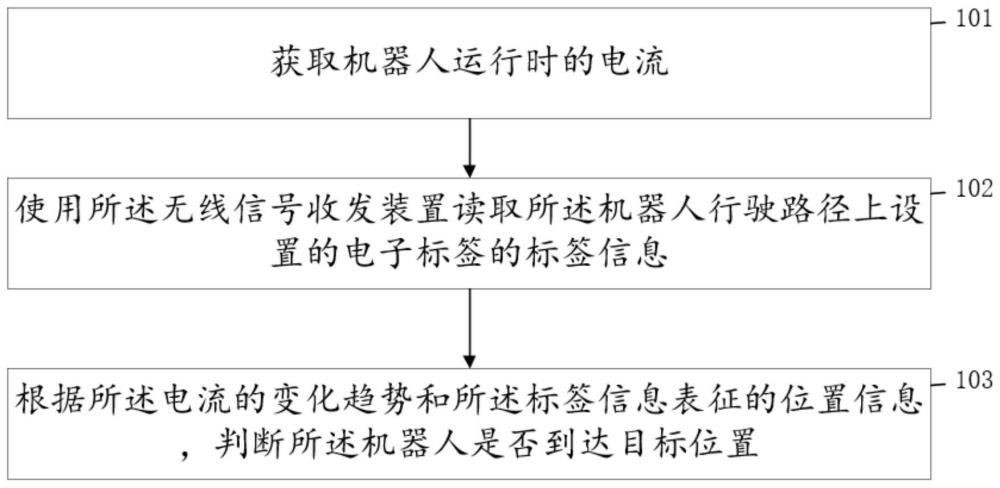
3、获取机器人运行时的电流;
4、使用所述无线信号收发装置读取所述机器人行驶路径上设置的电子标签的标签信息;
5、根据所述电流的变化趋势和所述标签信息表征的位置信息,判断所述机器人是否到达目标位置。
6、可选的,在获取机器人运行时的电流前,所述方法还包括:
7、获取所述机器人经过所述目标位置时的第一电流,记录所述第一电流的变化趋势为预设趋势;
8、将所述预设趋势与所述目标位置关联。
9、可选的,所述根据所述电流的变化趋势和所述标签信息表征的位置信息,判断所述机器人是否到达目标位置,包括:
10、判断所述电流的变化趋势是否为所述预设趋势,且所述位置信息中的特殊位置信息是否为所述预设信息;
11、若判断结果均为是,则判断所述机器人到达所述目标位置;
12、若判断结果存在否,则判断所述机器人未到达所述目标位置或定位存在误差。
13、可选的,所述判断所述机器人未到达所述目标位置或定位存在误差,包括:
14、当所述特殊位置信息为所述预设信息,所述电流的变化趋势不为所述预设趋势时,判断所述电流的变化趋势是否在所述预设趋势的误差范围内;
15、若是,则判断定位存在误差,所述机器人到达所述目标位置;
16、若否,则判断所述机器人未到达所述目标位置。
17、可选的,所述判断所述机器人未到达所述目标位置或定位存在误差,包括:
18、当所述电流的变化趋势为所述预设趋势,所述特殊位置信息不为所述预设信息时,判断所述特殊位置信息不为所述预设信息的次数是否为1;
19、若是,则判断定位存在误差,所述机器人到达所述目标位置,并将所述特殊位置信息修改为所述预设信息;
20、若否,则判断所述机器人未到达所述目标位置。
21、可选的,在使用所述无线信号收发装置读取所述机器人行驶路径上设置的电子标签的标签信息后,所述方法还包括:
22、当预设时间内读取不到所述标签信息时,判断所述电子标签的信息缺失;
23、当所述电流的变化趋势为预设趋势时,判断所述机器人到达目标位置。
24、可选的,一个所述目标位置仅设置一个所述电子标签。
25、可选的,所述目标位置包括:
26、停机位连接过渡桥架、停机位停机位置、简易换向位、组串中的旋转桥架和组串间的不断开活动桥架。
27、基于上述一种机器人定位的方法,本技术还公开了一种机器人定位的装置,所述机器人配置有无线信号收发装置,所述装置包括:电流获取单元、信息读取单元和判断单元;
28、所述电流获取单元,用于持续获取机器人运行时的电流;
29、所述信息读取单元,用于使用所述无线信号收发装置读取所述机器人行驶路径上设置的电子标签的标签信息;
30、所述判断单元,用于根据所述电流的变化趋势和所述标签信息表征的位置信息,判断所述机器人是否到达目标位置。
31、可选的,所述装置还包括:
32、趋势记录单元,用于获取所述机器人经过所述目标位置时的第一电流,记录所述第一电流的变化趋势为预设趋势;
33、关联单元,用于将所述预设趋势与所述目标位置关联。
34、可选的,所述判断单元,包括:
35、预设趋势判断子单元,用于判断所述电流的变化趋势是否为所述预设趋势,且所述位置信息中的特殊位置信息是否为所述预设信息;
36、第一位置到达子单元,用于若判断结果均为是,则判断所述机器人到达所述目标位置;
37、异常判断子单元,用于若判断结果存在否,则判断所述机器人未到达所述目标位置或定位存在误差。
38、可选的,所述异常判断子单元,包括:
39、误差范围判断子单元,用于当所述特殊位置信息为所述预设信息,所述电流的变化趋势不为所述预设趋势时,判断所述电流的变化趋势是否在所述预设趋势的误差范围内;
40、误差判断子单元,用于判断定位存在误差,所述机器人到达所述目标位置;
41、第一位置未到达子单元,用于判断所述机器人未到达所述目标位置。
42、可选的,所述异常判断子单元,包括:
43、信息判断子单元,用于当所述电流的变化趋势为所述预设趋势,所述特殊位置信息不为所述预设信息时,判断所述特殊位置信息不为所述预设信息的次数是否为1;
44、修改子单元,用于判断定位存在误差,所述机器人到达所述目标位置,并将所述特殊位置信息修改为所述预设信息;
45、第二位置未到达子单元,用于判断所述机器人未到达所述目标位置。
46、可选的,所述装置还包括:
47、缺失判断单元,用于当预设时间内读取不到所述标签信息时,判断所述电子标签的信息缺失;
48、第二位置到达单元,用于当所述电流的变化趋势为预设趋势时,判断所述机器人到达目标位置。
49、可选的,一个所述目标位置仅设置一个所述电子标签。
50、可选的,所述目标位置包括:
51、停机位连接过渡桥架、停机位停机位置、简易换向位、组串中的旋转桥架和组串间的不断开活动桥架。
52、基于上述一种机器人定位的方法,本技术还公开了一种机器人定位的系统,包括:配置有无线信号收发装置的机器人、电子标签和电流获取装置;
53、所述无线信号收发装置,用于获取所述电子标签中的标签信息;
54、所述电子标签,设置于光伏电站中,用于将所述光伏电站中的特殊位置信息记录在所述标签信息中;
55、所述电流获取装置,用于获取所述机器人的电流;
56、所述电流与所述标签信息结合用于定位所述机器人。
57、本技术公开了一种机器人定位的方法、装置及系统。机器人配置有无线信号收发装置,获取机器人运行时的电流,并使用无线信号收发装置读取电子标签信息。根据电流的变化趋势和标签信息表征的位置信息,判断机器人是否到达目标位置。通过结合机器人读取到的标签信息和机器人的实时电机电流的方法,仅需布置电子标签,即可精准识别不同的清扫场景,获得机器人的准确位置。方法简单、成本低,提高了机器人的适应性,有助于机器人稳定运行。
- 还没有人留言评论。精彩留言会获得点赞!