用于在轨拆装不脱出紧固螺钉的机器人末端工具的制作方法
本发明涉及空间站舱外机器人,尤其涉及一种用于在轨拆装不脱出紧固螺钉的机器人末端工具。
背景技术:
1、为保证空间站长期在轨稳定运行,空间站需具备舱外更换设备的能力,舱外设备通过特殊的不脱出紧固螺钉安装至空间站舱壁上;目前已实现航天员着舱外服、使用舱外专用的工具进行螺钉拆装及设备的更换,但后续对于更多的舱外设备更换任务,应交由在轨作业机器人完成。
2、在轨作业机器人通过夹持各类末端工具来开展拧钉、插拔等舱内外作业活动,工具上配备有相同的末端适配器,机器人抓取适配器与工具的组合体后,即可实现工具的安装及动力输出;由于空间站所处的空间环境具有高真空、冷热交变、原子氧、空间辐射等多种因素,因此对所用工具提出严格的环境适应性要求。
3、当机器人抓取螺钉拆装工具后,需要对待拆卸螺钉位置进行定位,由于机器人本身存在一定的视觉误差和机构误差,导致机器人末端的螺钉拧紧工具无法准确定位螺钉;同时,不脱出紧固螺钉所处的舱外设备安装耳片尺寸较小,紧固螺钉距离设备侧板较近,并且设备高度不一,周围环境较复杂,导致不脱出紧固螺钉的拆装操作空间十分狭小,因此,结合以上情况,亟需有一种专用的在轨拆装不脱出紧固螺钉的机器人末端工具,满足复杂空间环境下,在狭小操作范围内能够实现末端位置误差补偿的要求。
技术实现思路
1、针对上述的缺陷,本发明的目的在于提供一种用于在轨拆装不脱出紧固螺钉的机器人末端工具,能够满足复杂空间环境下,在狭小操作范围内能够实现末端位置误差补偿的要求。
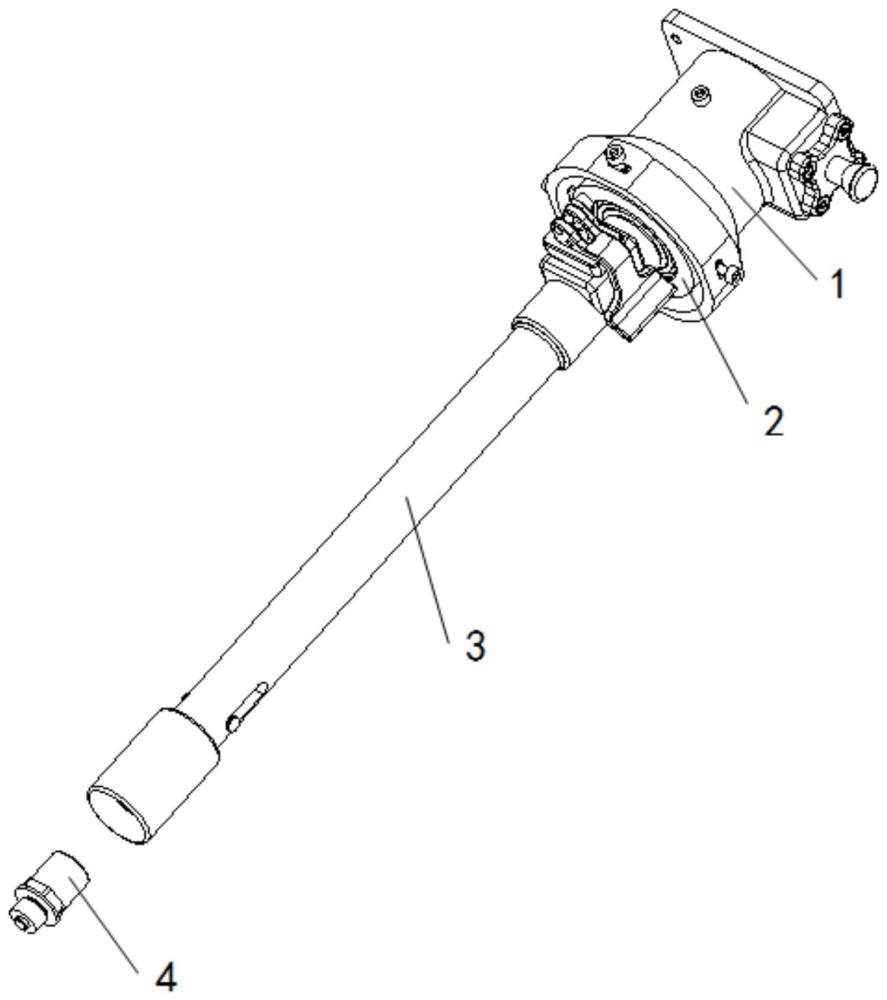
2、为了实现上述目的,本发明提供了一种用于在轨拆装不脱出紧固螺钉的机器人末端工具,包括有适配外壳、径向浮动块以及延长杆,所述适配外壳的一端与机器人末端适配器固定连接,所述径向浮动块安装于所述适配外壳内,且所述径向浮动块设有回位机构,所述回位机构与所述适配外壳上的限位结构组接以用于在所述径向浮动块产生径向移动时将所述径向浮动块弹性回位;所述延长杆与所述径向浮动块可拆卸式连接,所述延长杆的末端设为与所述不脱出紧固螺钉相适配的组接联动机构;其中,所述组接联动机构用于根据机器人的传输力矩与所述不脱出紧固螺钉进行连接与拆装,所述机器人与所述机器人末端适配器对接。
3、可选的,所述适配外壳上端设有安装界面,所述安装界面上设有至少一用于与所述机器人末端适配器连接的安装接口。
4、可选的,所述限位结构包括若干长条孔,所述若干长条孔对称分布于所述适配外壳的下端周向处;所述回位机构包括若干与所述长条孔对应的滑轴和第一弹簧,所述第一弹簧套设于所述滑轴上,且所述滑轴可滑动式限位在所述长条孔中。
5、可选的,所述径向浮动块还包括有在轨机器人末端匹配键槽、十字滑块和转动轴,所述在轨机器人末端匹配键槽内设有若干与所述机器人的输出轴连接的对称凹槽,所述在轨机器人末端匹配键槽通过第一轴承与所述适配外壳内侧的第一固定套连接,所述在轨机器人末端匹配键槽的下端设有两个第一卡块,且所述第一卡块与所述十字滑块上端的第一滑动轴连接,所述十字滑块的下端与所述转动轴上端的第二卡块通过第二滑动轴连接,所述十字滑块分别与所述第一卡块和所述第二卡块存在间隙,所述第一滑动轴和所述第二滑动轴之间为轴向正交分布;所述转动轴与所述延长杆可拆卸式传动连接。
6、可选的,所述回位机构还包括有第二固定套,所述第二固定套通过第二轴承与所述转动轴连接,所述第二固定套的外侧面上设有若干对称分布的螺纹孔,所述滑轴穿过所述长条孔与所述螺纹孔连接,所述第一弹簧处于所述适配外壳和所述第二固定套之间。
7、可选的,所述转动轴的下端为方形长轴,所述方形长轴的中部设有锁定通孔,所述锁定通孔用于与所述延长杆的锁定机构可拆卸式连接。
8、可选的,所述延长杆包括有延长套杆、扳拧头、第二弹簧和销轴,所述延长套杆上端设有方形长孔,所述方形长孔内设有所述锁定机构,所述延长套杆的下端面设为喇叭形导向开口和台阶内孔;所述扳拧头通过所述销轴安装于所述台阶内孔中,且所述第二弹簧设于所述延长套杆内孔中并竖直于所述扳拧头的上端。
9、可选的,所述延长套杆下端的侧边设有长条通孔,所述扳拧头上设有圆形通孔,所述扳拧头内置于所述台阶内孔中,且所述销轴穿过所述长条通孔连接于所述圆形通孔上。
10、可选的,所述方形长孔与所述方形长轴之间设有快拆结构。
11、可选的,所述第一滑动轴、所述第二滑动轴、所述扳拧头以及所述销轴的表面经固体润滑处理,所述固体润滑采用聚四氟乙烯固体润滑膜。
12、本发明所述的用于在轨拆装不脱出紧固螺钉的机器人末端工具,包括有适配外壳、径向浮动块以及延长杆,所述适配外壳的一端与机器人末端适配器固定连接,径向浮动块安装于所述适配外壳内,且径向浮动块设有回位机构,所述回位机构与适配外壳上的限位结构组接以用于在径向浮动块产生径向移动时将径向浮动块弹性回位;延长杆与径向浮动块可拆卸式连接,延长杆的末端设为与不脱出紧固螺钉相适配的组接联动机构;其中,组接联动机构用于根据机器人的传输力矩与不脱出紧固螺钉进行连接与拆装,所述机器人与机器人末端适配器对接。借此,本发明具有径向和轴向浮动的功能,适用于机器人末端位置误差补偿的情况,同时适用于狭小空间内的不脱出紧固螺钉拆装。
技术特征:
1.一种用于在轨拆装不脱出紧固螺钉的机器人末端工具,其特征在于,包括有适配外壳、径向浮动块以及延长杆,所述适配外壳的一端与机器人末端适配器固定连接,所述径向浮动块安装于所述适配外壳内,且所述径向浮动块设有回位机构,所述回位机构与所述适配外壳上的限位结构组接以用于在所述径向浮动块产生径向移动时将所述径向浮动块弹性回位;所述延长杆与所述径向浮动块可拆卸式连接,所述延长杆的末端设为与所述不脱出紧固螺钉相适配的组接联动机构;其中,所述组接联动机构用于根据机器人的传输力矩与所述不脱出紧固螺钉进行连接与拆装,所述机器人与所述机器人末端适配器对接。
2.根据权利要求1所述的用于在轨拆装不脱出紧固螺钉的机器人末端工具,其特征在于,所述适配外壳上端设有安装界面,所述安装界面上设有至少一用于与所述机器人末端适配器连接的安装接口。
3.根据权利要求1所述的用于在轨拆装不脱出紧固螺钉的机器人末端工具,其特征在于,所述限位结构包括若干长条孔,所述若干长条孔对称分布于所述适配外壳的下端周向处;所述回位机构包括若干与所述长条孔对应的滑轴和第一弹簧,所述第一弹簧套设于所述滑轴上,且所述滑轴可滑动式限位在所述长条孔中。
4.根据权利要求3所述的用于在轨拆装不脱出紧固螺钉的机器人末端工具,其特征在于,所述径向浮动块还包括有在轨机器人末端匹配键槽、十字滑块和转动轴,所述在轨机器人末端匹配键槽内设有若干与所述机器人的输出轴连接的对称凹槽,所述在轨机器人末端匹配键槽通过第一轴承与所述适配外壳内侧的第一固定套连接,所述在轨机器人末端匹配键槽的下端设有两个第一卡块,且所述第一卡块与所述十字滑块上端的第一滑动轴连接,所述十字滑块的下端与所述转动轴上端的第二卡块通过第二滑动轴连接,所述十字滑块分别与所述第一卡块和所述第二卡块存在间隙,所述第一滑动轴和所述第二滑动轴之间为轴向正交分布;所述转动轴与所述延长杆可拆卸式传动连接。
5.根据权利要求4所述的用于在轨拆装不脱出紧固螺钉的机器人末端工具,其特征在于,所述回位机构还包括有第二固定套,所述第二固定套通过第二轴承与所述转动轴连接,所述第二固定套的外侧面上设有若干对称分布的螺纹孔,所述滑轴穿过所述长条孔与所述螺纹孔连接,所述第一弹簧处于所述适配外壳和所述第二固定套之间。
6.根据权利要求4所述的用于在轨拆装不脱出紧固螺钉的机器人末端工具,其特征在于,所述转动轴的下端为方形长轴,所述方形长轴的中部设有锁定通孔,所述锁定通孔用于与所述延长杆的锁定机构可拆卸式连接。
7.根据权利要求6所述的用于在轨拆装不脱出紧固螺钉的机器人末端工具,其特征在于,所述延长杆包括有延长套杆、扳拧头、第二弹簧和销轴,所述延长套杆上端设有方形长孔,所述方形长孔内设有所述锁定机构,所述延长套杆的下端面设为喇叭形导向开口和台阶内孔;所述扳拧头通过所述销轴安装于所述台阶内孔中,且所述第二弹簧设于所述延长套杆内孔中并竖直于所述扳拧头的上端。
8.根据权利要求7所述的用于在轨拆装不脱出紧固螺钉的机器人末端工具,其特征在于,所述延长套杆下端的侧边设有长条通孔,所述扳拧头上设有圆形通孔,所述扳拧头内置于所述台阶内孔中,且所述销轴穿过所述长条通孔连接于所述圆形通孔上。
9.根据权利要求7所述的用于在轨拆装不脱出紧固螺钉的机器人末端工具,其特征在于,所述方形长孔与所述方形长轴之间设有快拆结构。
10.根据权利要求7所述的用于在轨拆装不脱出紧固螺钉的机器人末端工具,其特征在于,所述第一滑动轴、所述第二滑动轴、所述扳拧头以及所述销轴的表面经固体润滑处理,所述固体润滑采用聚四氟乙烯固体润滑膜。
技术总结
本发明提供了一种用于在轨拆装不脱出紧固螺钉的机器人末端工具,包括有适配外壳、径向浮动块以及延长杆,所述适配外壳的一端与机器人末端适配器固定连接,径向浮动块安装于所述适配外壳内,且径向浮动块设有回位机构,所述回位机构与适配外壳上的限位结构组接以用于在径向浮动块产生径向移动时将径向浮动块弹性回位;延长杆与径向浮动块可拆卸式连接,延长杆的末端设为与不脱出紧固螺钉相适配的组接联动机构;其中,组接联动机构用于根据机器人的传输力矩与不脱出紧固螺钉进行连接与拆装,所述机器人与机器人末端适配器对接。借此,本发明具有径向和轴向浮动的功能,适用于机器人末端位置误差补偿的情况,同时适用于狭小空间内的不脱出紧固螺钉拆装。
技术研发人员:武婷婷,刘俊良,郭涛,于洋,王哲,杨佳鑫,张一越,郝宏大
受保护的技术使用者:北京卫星环境工程研究所
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!