一种机器人运行监控方法、装置、系统和介质
本发明涉及机器人,具体是涉及一种机器人运行监控方法、装置、系统和介质。
背景技术:
1、现有的技术中,机器人的动作一般都是规定好了。当机器人的动作出问题的时候,一般都是通过其制作的产品出现问题来反馈查找到出问题的机器人。现有技术并没有对机器人的动作的监控,需要对动作的轨迹进行分析,这个分析则需要花费较长的时间。这样就会导致对于工作轨迹的响应速度不高。因此,如何提高工作机器人的监控的响应速度是行业内亟需解决的技术问题。
技术实现思路
1、本发明提供一种机器人运行监控方法、装置、系统和介质,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
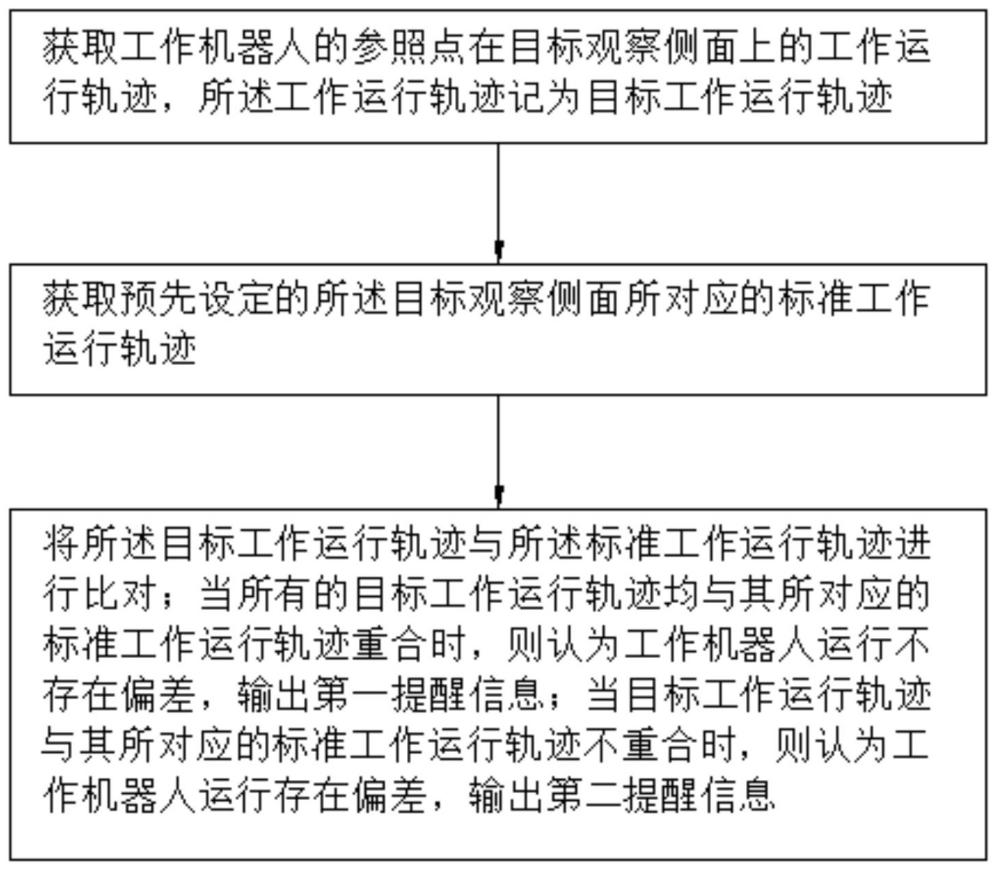
2、本发明提供一种机器人运行监控方法,包括:获取工作机器人的参照点在目标观察侧面上的工作运行轨迹,所述工作运行轨迹记为目标工作运行轨迹;获取预先设定的所述目标观察侧面所对应的标准工作运行轨迹;将所述目标工作运行轨迹与所述标准工作运行轨迹进行比对;当所有的目标工作运行轨迹均与其所对应的标准工作运行轨迹重合时,则认为工作机器人运行不存在偏差,输出第一提醒信息以告知管理人员;当目标工作运行轨迹与其所对应的标准工作运行轨迹不重合时,则认为工作机器人运行存在偏差,输出第二提醒信息以告知管理人员。
3、进一步,所述输出第一提醒信息以告知管理人员具体包括:访问注册服务器,从注册服务器中获取工作机器人的管理人员的联系方式,从预先设定的话语库中生成第一提醒信息,根据所述联系方式将所述第一提醒信息发送给管理人员。
4、进一步,所述输出第二提醒信息以告知管理人员具体包括:访问注册服务器,从注册服务器中获取工作机器人的管理人员的联系方式,从预先设定的话语库中生成第二提醒信息,根据所述联系方式将所述第二提醒信息发送给管理人员。
5、进一步,所述获取预先设定的所述目标观察侧面所对应的标准工作运行轨迹具体包括:获取工作机器人的身份信息和目标观察侧面的编号,根据所述身份信息和目标观察侧面的编号从本地设备中获取对应的标准工作运行轨迹。
6、进一步,目标观察侧面的数量有三个,分别为第一目标观察侧面、第二目标观察侧面和第三目标观察侧面,其中,第一目标观察侧面、第二目标观察侧面和第三目标观察侧面分别相互垂直。
7、进一步,所述第一目标观察侧面为主视面,所述第二目标观察侧面为侧视面,所述第三目标观察侧面为俯视面。
8、另一方面,提供了一种机器人运行监控装置,包括:处理器何存储器,所述存储器用于存储计算机可读程序;当所述计算机可读程序被所述处理器执行时,使得所述处理器实现如上述技术方案中任一项所述的机器人运行监控方法。
9、另一方面,提供了一种机器人运行监控系统,包括:第一获取模块、第二获取模块和判断模块;
10、所述第一获取模块用于获取工作机器人的参照点在目标观察侧面上的工作运行轨迹,所述工作运行轨迹记为目标工作运行轨迹;
11、所述第二获取模块用于获取预先设定的所述目标观察侧面所对应的标准工作运行轨迹;
12、所述判断模块用于将所述目标工作运行轨迹与所述标准工作运行轨迹进行比对;当所有的目标工作运行轨迹均与其所对应的标准工作运行轨迹重合时,则认为工作机器人运行不存在偏差,输出第一提醒信息以告知管理人员;当目标工作运行轨迹与其所对应的标准工作运行轨迹不重合时,则认为工作机器人运行存在偏差,输出第二提醒信息以告知管理人员。
13、进一步,目标观察侧面的数量有三个,分别为第一目标观察侧面、第二目标观察侧面和第三目标观察侧面,其中,第一目标观察侧面、第二目标观察侧面和第三目标观察侧面分别相互垂直。
14、另一方面,提供了一种计算机可读存储介质,其特征在于,其中存储有处理器可执行的程序,所述处理器可执行的程序被处理器执行时用于实现如上述技术方案中任意一项所述的机器人运行监控方法。
15、本发明至少具有以下有益效果:本发明的机器人运行监控通过将工作机器人的三维的工作运动轨迹压缩成二维的形式,从而提高了比对的效率,从而可以快速的发现工作机器人在工作过程中所存在问题。提高判断效率。本发明提供了装置、系统和介质的有益效果与机器人运行监控方法类似,这里就不重复描述了。本发明主要用于机器人技术领域。
技术特征:
1.一种机器人运行监控方法,其特征在于,包括:获取工作机器人的参照点在目标观察侧面上的工作运行轨迹,所述工作运行轨迹记为目标工作运行轨迹;获取预先设定的所述目标观察侧面所对应的标准工作运行轨迹;将所述目标工作运行轨迹与所述标准工作运行轨迹进行比对;当所有的目标工作运行轨迹均与其所对应的标准工作运行轨迹重合时,则认为工作机器人运行不存在偏差,输出第一提醒信息以告知管理人员;当目标工作运行轨迹与其所对应的标准工作运行轨迹不重合时,则认为工作机器人运行存在偏差,输出第二提醒信息以告知管理人员。
2.根据权利要求1所述的一种机器人运行监控方法,其特征在于,所述输出第一提醒信息以告知管理人员具体包括:访问注册服务器,从注册服务器中获取工作机器人的管理人员的联系方式,从预先设定的话语库中生成第一提醒信息,根据所述联系方式将所述第一提醒信息发送给管理人员。
3.根据权利要求1所述的一种机器人运行监控方法,其特征在于,所述输出第二提醒信息以告知管理人员具体包括:访问注册服务器,从注册服务器中获取工作机器人的管理人员的联系方式,从预先设定的话语库中生成第二提醒信息,根据所述联系方式将所述第二提醒信息发送给管理人员。
4.根据权利要求1所述的一种机器人运行监控方法,其特征在于,所述获取预先设定的所述目标观察侧面所对应的标准工作运行轨迹具体包括:获取工作机器人的身份信息和目标观察侧面的编号,根据所述身份信息和目标观察侧面的编号从本地设备中获取对应的标准工作运行轨迹。
5.根据权利要求1所述的一种机器人运行监控方法,其特征在于,目标观察侧面的数量有三个,分别为第一目标观察侧面、第二目标观察侧面和第三目标观察侧面,其中,第一目标观察侧面、第二目标观察侧面和第三目标观察侧面分别相互垂直。
6.根据权利要求5所述的一种机器人运行监控方法,其特征在于,所述第一目标观察侧面为主视面,所述第二目标观察侧面为侧视面,所述第三目标观察侧面为俯视面。
7.一种机器人运行监控装置,其特征在于,包括:
8.一种机器人运行监控系统,其特征在于,包括:第一获取模块、第二获取模块和判断模块;
9.根据权利要求8所述的一种机器人运行监控系统,其特征在于,目标观察侧面的数量有三个,分别为第一目标观察侧面、第二目标观察侧面和第三目标观察侧面,其中,第一目标观察侧面、第二目标观察侧面和第三目标观察侧面分别相互垂直。
10.一种计算机可读存储介质,其特征在于,其中存储有处理器可执行的程序,所述处理器可执行的程序被处理器执行时用于实现如权利要求1至6任意一项所述的机器人运行监控方法。
技术总结
本发明公开了一种机器人运行监控方法、装置、系统和介质,其中,方法包括:获取工作机器人的参照点在目标观察侧面上的目标工作运行轨迹;获取预先设定的所述目标观察侧面所对应的标准工作运行轨迹;将所述目标工作运行轨迹与所述标准工作运行轨迹进行比对;当所有的目标工作运行轨迹均与其所对应的标准工作运行轨迹重合时,则认为工作机器人运行不存在偏差;当目标工作运行轨迹与其所对应的标准工作运行轨迹不重合时,则认为工作机器人运行存在偏差。通过将工作机器人的三维的工作运动轨迹压缩成二维的形式,从而提高了比对的效率,从而可以快速的发现工作机器人在工作过程中所存在问题。提高判断效率。本发明主要用于机器人技术领域。
技术研发人员:武交峰,简志雄,张维威,原红玲,车海波,罗明
受保护的技术使用者:广东环境保护工程职业学院
技术研发日:
技术公布日:2024/4/8
- 还没有人留言评论。精彩留言会获得点赞!