一种基于欧拉角计算机器人工件坐标系的算法的制作方法
本发明属于工业机器人,具体是一种基于欧拉角计算机器人工件坐标系的算法。
背景技术:
1、机器人通常通过控制程序执行任务,在这些控制程序中,机器人需要了解工件的位置和方向,以便执行准确的操作,然而机器人通常在自身坐标系中运动,此时需要进行坐标系转换,以便在工件坐标系中进行任务,计算机器人工件坐标系通常依赖于传感器技术,如激光测距仪、视觉系统、编码器等,以测量工件上的特征点或参考点。
2、但现有的技术使用传感器测量工件上的参考点坐标时,这些传感器可能存在测量误差,受到环境条件、传感器质量和标定等因素的影响,导致工件坐标系的不准确性,机器人执行任务时可能出现定位偏差,影响生产效率,同时一些技术还需要操作员手动选择参考点和执行标定过程,而手动操作容易引入人为错误,还依赖于操作员的经验,这限制了机器人系统的自动化程度。
技术实现思路
1、针对现有技术的不足,为此,本发明提出了一种基于欧拉角计算机器人工件坐标系的算法,用于解决上述所提出的技术问题。
2、为实现上述目的,本发明通过以下内容予以实现:一种基于欧拉角计算机器人工件坐标系的算法,该方法具体包括以下步骤:
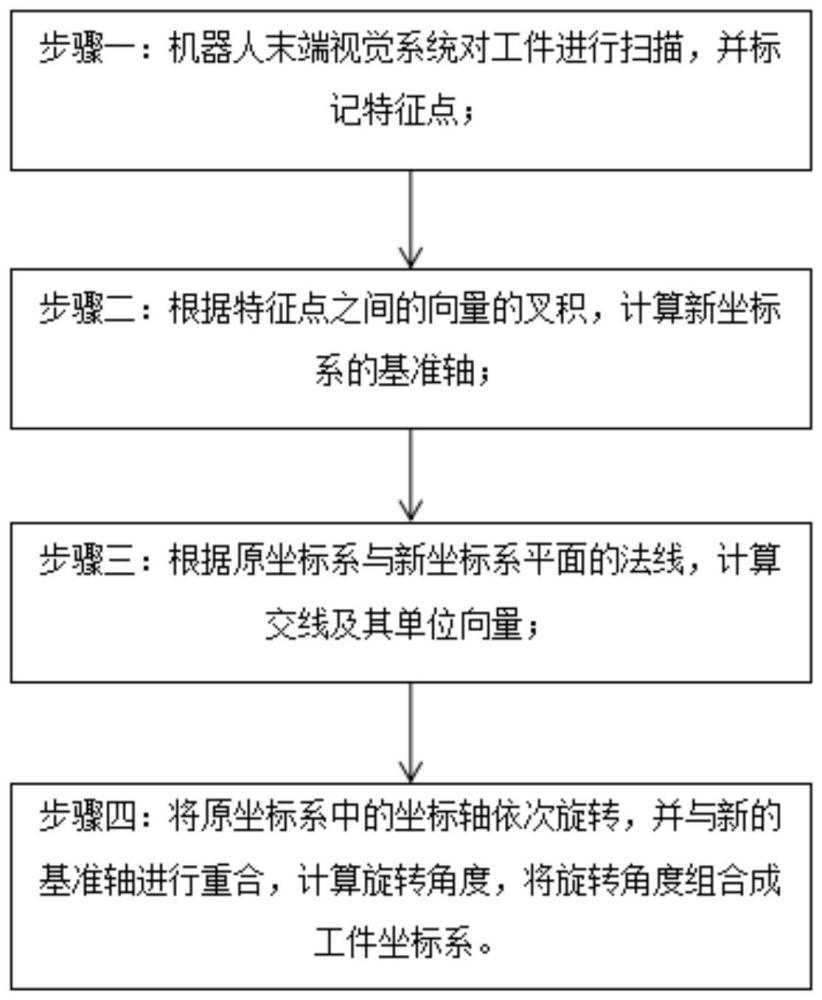
3、步骤一:基于机器人末端视觉系统对工件进行扫描,并标记特征点;
4、步骤二:基于特征点之间的向量关系,计算新坐标系的基准轴;
5、步骤三:基于原坐标系与新坐标系平面的法线,计算交线及其单位向量;
6、步骤四:将原坐标系中的坐标轴依次旋转,并与新的基准轴进行重合,计算旋转角度,将旋转角度组合成工件坐标系。
7、作为本发明的进一步方案,特征点的获取方法为:
8、获取到工件上的特征点的图像数据,并通过图像处理算法在视觉数据中识别和定位特征点,同时将特征点分别标记为p1(x1,y1,z1),p2(x2,y2,z2)和p3(x3,y3,z3)。
9、作为本发明的进一步方案,新坐标的基准轴的获取方法为:
10、选择特征点p1作为基准点,基于公式vector3 x=(x2-x1,y2-y1,z2-z1)和vector3 k=(x3-x1,y3-y1,z3-z1)分别得到p1到p2的向量vector3 x以及p1到p3的临时向量vector3 k;
11、将vector3 x与vector3 k进行叉积计算,得到新基准z轴的轴向量vector3 z;
12、将新基准z轴的轴向量vector3 z与轴向量vector3 x进行叉积计算,得到新基准y轴的轴向量vector3 y;
13、基于vector3 x、vector3 z以及vector3 y三个轴向量构建新坐标系,同时将新坐标系中的基准轴分别表示为x1,y1和z1。
14、作为本发明的进一步方案,新坐标系的原点位置与原坐标系的原点位置重合。
15、作为本发明的进一步方案,交线及其单位向量的具体计算方法为:
16、分别在原坐标系的xoy平面设置法线n1,在新坐标系的y1oz1平面设置法线n2,同时将n1与n2进行叉积计算,得到交线n(n1,n2,n3),并基于得到交线n的单位向量nd,其中
17、作为本发明的进一步方案,将原坐标系中的坐标轴依次进行旋转时,先判断原坐标系的xoy平面与新坐标系的y1oz1平面是否共面,当xoy平面与y1oz1平面不共面时,此时依次转动原坐标的z,y,x轴,并计算欧拉角,反之,当xoy平面与y1oz1平面共面时,依次转动原坐标的z,y轴,并计算欧拉角。
18、作为本发明的进一步方案,欧拉角的计算方法为:
19、s41:在原坐标系的y轴上设置单位向量dy=(0,1,0),转动原坐标系的z轴,使原坐标系的y轴与交线n重合,基于公式得到旋转角度a;
20、s42:在z轴上设置单位向量dz=(0,0,1),之后将y轴的单位向量dy与交线n的单位向量nd进行叉积计算,得到新的旋转轴的轴向量,并将新的旋转轴向量转换成单位向量l1;
21、s43:依据公式得到轴向角θ1,当轴向角θ1等于0时,表示新的旋转轴的轴向量与原旋转轴z同向,反之,当轴向角θ1不等于0时,表示新的旋转轴的轴向量与原旋转轴z反向,此时令新的旋转轴的轴向量lf1=-l1,并将坐标系中各个轴向量按照新的旋转轴的轴向量lf1进行更新;
22、s44:将原坐标中的y轴进行旋转,使原坐标中的x轴与新坐标系中的x1进行重合,之后按照上述步骤s41至s43中的方法进行处理,得到旋转角度b;
23、s45:将原坐标系中的x轴进行旋转,使原坐标系中的y轴与新坐标系中的y1进行重合,并将其按照上述步骤s41至s43的方法进行处理,得到旋转角度c;
24、s46:将得到的旋转角度(a,b,c)与原坐标进行组合,得到工件坐标系(x1,y1,z1,a,b,c)。
25、作为本发明的进一步方案,将工件坐标系传输至机器人控制端,当机器人控制端接收到工件坐标系后,对机器人的运动轨迹和姿态进行规划,并执行工作任务。
26、与现有技术相比,本发明的有益效果是:
27、本发明先通过机器人末端视觉系统对工件进行扫描,能够准确的扫描和识别工件上的特征点,从而提高工件坐标系在计算过程中的准确性,减少位置误差;
28、本发明通过采用欧拉角计算,将原坐标系转换成工件坐标系,使机器人能够准确的执行任务,减少工作人员的手工干预过程,进而提高机器人系统的自动化程度;
29、本发明使用工件坐标系来执行高精度的重复性作业,确保机器人能够准确定位和操作构件,同时在作业过程中实时监测工件特征点,以纠正任何可能的位置偏差或工件变化,维持高精度。
技术特征:
1.一种基于欧拉角计算机器人工件坐标系的算法,其特征在于,该方法具体包括以下步骤:
2.根据权利要求1所述的一种基于欧拉角计算机器人工件坐标系的算法,其特征在于,特征点的获取方法为:
3.根据权利要求2所述的一种基于欧拉角计算机器人工件坐标系的算法,其特征在于,新坐标的基准轴的获取方法为:
4.根据权利要求3所述的一种基于欧拉角计算机器人工件坐标系的算法,其特征在于,新坐标系的原点位置与原坐标系的原点位置重合。
5.根据权利要求1所述的一种基于欧拉角计算机器人工件坐标系的算法,其特征在于,交线及其单位向量的具体计算方法为:
6.根据权利要求1所述的一种基于欧拉角计算机器人工件坐标系的算法,其特征在于,将原坐标系中的坐标轴依次进行旋转时,先判断原坐标系的xoy平面与新坐标系的y1oz1平面是否共面,当xoy平面与y1oz1平面不共面时,此时依次转动原坐标的z,y,x轴,并计算欧拉角,反之,当xoy平面与y1oz1平面共面时,依次转动原坐标的z,y轴,并计算欧拉角。
7.根据权利要求6所述的一种基于欧拉角计算机器人工件坐标系的算法,其特征在于,欧拉角的计算方法为:
8.根据权利要求1所述的一种基于欧拉角计算机器人工件坐标系的算法,其特征在于,将工件坐标系传输至机器人控制端,当机器人控制端接收到工件坐标系后,对机器人的运动轨迹和姿态进行规划,并执行工作任务。
技术总结
本发明公开了一种基于欧拉角计算机器人工件坐标系的算法,涉及工业机器人技术领域,包括:步骤一:基于机器人末端视觉系统对工件进行扫描,并标记特征点;步骤二:基于特征点之间的向量关系,计算新坐标系的基准轴;步骤三:基于原坐标系与新坐标系平面的法线,计算交线及其单位向量;步骤四:将原坐标系中的坐标轴依次旋转,并与新的基准轴进行重合,计算旋转角度,将旋转角度组合成工件坐标系,通过采用欧拉角计算,将原坐标系转换成工件坐标系,使机器人能够准确的执行任务,减少工作人员的手工干预过程,进而提高机器人系统的自动化程度。
技术研发人员:王伟昌,郭家友,韦超凡,高鑫
受保护的技术使用者:安徽工布智造工业科技有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!