一种把手式智能门锁的制作方法
本发明涉及锁体,具体涉及一种把手式智能门锁。
背景技术:
1、随着人口数量的不断增加,房屋的数量也在不断增加,门锁是控制房屋打开与关闭的重要结构之一。
2、现有的把手式智能门锁主要通过指纹、密码以及感应卡这几种类型进行解锁操作,在内部芯片处理完毕后,控制电机带动从动件从而实现解锁动作,但是在目前的使用过程中,由于用于控制解锁的电机主要通过齿轮来进行传动,使得电机与传动齿轮的之间具有较大的阻力,在通过把手驱动开锁时,需要克服电机自身阻力才能完成开锁动作,使得操作开锁的力较大,影响客户的使用体验。
技术实现思路
1、因此,本发明所要解决的技术问题在于现有技术中的把手式智能门锁主要通过指纹、密码以及感应卡这几种类型进行解锁操作,在内部芯片处理完毕后,控制电机带动从动件从而实现解锁动作,但是在目前的使用过程中,由于用于控制解锁的电机主要通过齿轮来进行传动,使得电机与传动齿轮的之间具有较大的阻力,在通过把手驱动开锁时,需要克服电机自身阻力才能完成开锁动作,使得操作开锁的力较大,影响客户的使用体验。
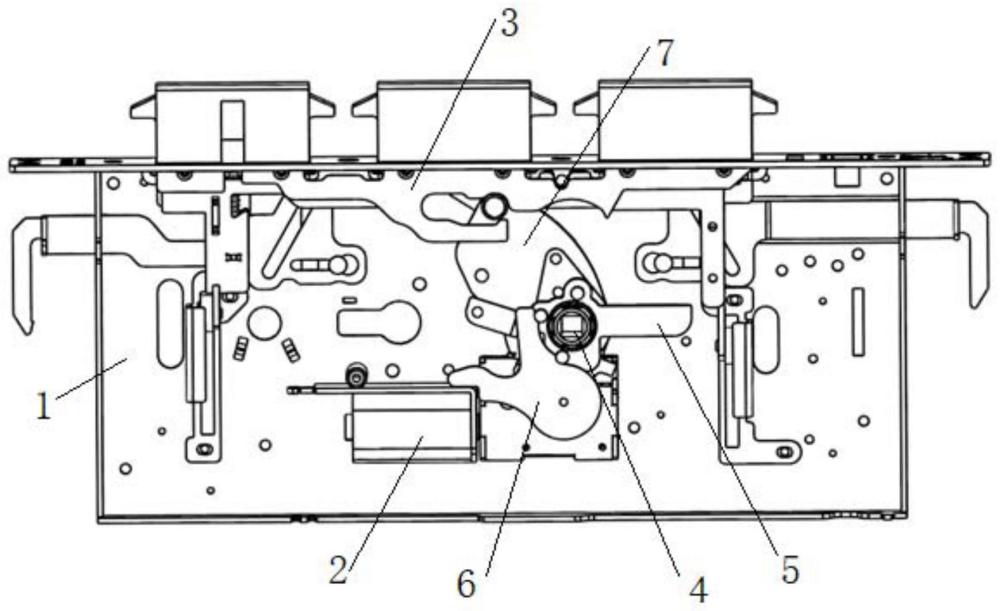
2、为此,本发明提供一种把手式智能门锁,包括壳体、驱动电机、锁舌与方钢连接座,所述驱动电机适于通过齿轮组驱动所述锁舌伸缩;方钢连接座上适于连接把手以控制所述锁舌伸缩,还包括:
3、第一电机拨片,套设在所述方钢连接座上且与所述方钢连接座同步运动,所述第一电机拨片上设有拨块;
4、第二电机拨片,与所述壳体活动连接且设于所述驱动电机一侧,所述第二电机拨片包括第一拨脚和第二拨脚,所述第一拨脚与拨块抵接,所述第二拨脚与所述驱动电机抵接;
5、其中,所述方钢连接座被配置为在把手带动下沿开锁方向或上锁方向转动,以带动所述第一电机拨片同向转动,且通过所述拨块推动所述第一拨脚带动所述第二拨脚相对壳体转动,以推动所述驱动电机运动直至与所述齿轮组分离。
6、可选地,所述拨块包括第一拨块和第二拨块;
7、所述方钢连接座被配置为在把手带动下沿开锁方向转动时,所述第一拨块推动所述第一拨脚带动所述第二拨脚相对壳体转动;
8、所述方钢连接座被配置为在把手带动下沿上锁方向转动时,所述第二拨块推动所述第一拨脚带动所述第二拨脚相对壳体转动。
9、可选地,所述第一拨脚与所述第一拨块、第二拨块接触一侧呈弧面,所述第一拨块、第二拨块在所述弧面上滑动,以推动所述第二电机拨片相对所述壳体转动。
10、可选地,在所述方钢连接座沿上锁方向转动时,所述第一电机拨片随所述方钢连接座同步转动,以推动所述锁舌伸出所述壳体。
11、可选地,还包括锁舌拨片,其套设在所述方钢连接座上,所述锁舌拨片上设有适于滑动设置在锁舌凹槽内的第三拨块;
12、其中,在所述方钢连接座沿开锁方向转动时,所述锁舌拨片受所述方钢连接座驱动而带动所述第三拨块向壳体内侧运动,以带动所述锁舌缩入所述壳体。
13、可选地,还包括:
14、拉手拨片,套设在所述方钢连接座上且与所述方钢连接座同步运动;
15、翘杆,与所述壳体铰接,所述翘杆一端与所述拉手拨片抵接,所述翘杆另一端与所述锁舌拨片上第四拨块抵接;
16、其中,在所述方钢连接座沿开锁方向转动时,所述拉手拨片受所述方钢连接座带动以推动所述翘杆转动,而经所述第四拨块、所述锁舌拨片驱动所述第三拨块向壳体内侧运动,以带动所述锁舌缩入所述壳体。
17、可选地,在所述方钢连接座沿上锁方向转动以推动所述锁舌伸出所述壳体时,所述锁舌拨片受所述舌头带动以复位,且所述锁舌拨片经所述第四拨块带动所述翘杆、所述拉手拨片复位。
18、可选地,所述翘杆与拉手拨片相抵接处均呈折弯状,以相互扣合。
19、可选地,所述第三拨块、第四拨块设于所述锁舌拨片相对两侧,且所述第三拨块、第四拨块可相对锁舌拨片本体转动。
20、可选地,所述锁舌拨片与所述方钢连接座套设处设有圆形通孔,以使所述锁舌拨片可独立转动;
21、所述拉手拨片、所述第一电机拨片与所述方钢连接座套设处设有方形通孔,以使所述拉手拨片、所述第一电机拨片与所述方钢连接座头同步运动。
22、本发明提供的一种把手式智能门锁,具有如下优点:
23、1.本发明提供一种把手式智能门锁,包括壳体、驱动电机、锁舌与方钢连接座,所述驱动电机适于通过齿轮组驱动所述锁舌伸缩;方钢连接座上适于连接把手以控制所述锁舌伸缩;还包括第一电机拨片和第二电机拨片,第一电机拨片套设在所述方钢连接座上且与所述方钢连接座同步运动,所述第一电机拨片上设有拨块;第二电机拨片与所述壳体活动连接且设于所述驱动电机一侧,所述第二电机拨片包括第一拨脚和第二拨脚,所述第一拨脚与拨块抵接,所述第二拨脚与所述驱动电机抵接;其中,所述方钢连接座被配置为在把手带动下沿开锁方向或上锁方向转动,且通过所述拨块推动所述第一拨脚带动所述第二拨脚相对壳体转动,以推动所述驱动电机运动直至与所述齿轮组分离。
24、此结构的把手式智能门锁,通过设置第一电机拨片、第二电机拨片,在方钢连接座在把手带动下沿开锁方向或上锁方向转动时,由于第一电机拨片与所述方钢连接座同步运动,通过第一电机拨片上拨块推动所述第一拨脚带动所述第二拨脚相对壳体转动,由于第二拨脚与所述驱动电机抵接,进而可通过第二拨脚推动所述驱动电机运动直至与所述齿轮组分离。避免在通过把手驱动开锁时,需要克服电机自身阻力才能完成开锁动作,使得操作开锁的力较大,影响客户的使用体验。
25、2.本发明提供一种把手式智能门锁,拉手拨片套设在方钢连接座上且与方钢连接座同步运动,翘杆与壳体铰接,翘杆左端与拉手拨片抵接,翘杆另一端与锁舌拨片上第四拨块抵接。在方钢连接座沿开锁方向转动时,拉手拨片受方钢连接座带动以推动翘杆顺时针转动,拉手拨片右端会向下推动第四拨块,进而通过第四拨块推动锁舌拨片相对方钢连接座顺时针转动,第三拨块在锁舌拨片带动下沿逆时针方向转动,使得第三拨块下移以通过锁舌下方的凹槽带动锁舌下移进入锁体内部,实现开锁。
26、3.本发明提供一种把手式智能门锁,方钢连接座被配置为在把手带动下沿上锁方向转动,以带动第一电机拨片同向转动,进而通过第一电机拨片右端抵接在锁舌下侧以推动锁舌上移直至伸出壳体,完成上锁。同时,在锁舌上移过程中,锁舌通过其下侧的凹槽带动第三拨块、锁舌拨片上移直至恢复原位,且锁舌拨片经第四拨块带动翘杆、拉手拨片复位。
27、4.本发明提供一种把手式智能门锁,翘杆与拉手拨片相抵接处均呈折弯状,以相互扣合。
技术特征:
1.一种把手式智能门锁,包括壳体、驱动电机、锁舌与方钢连接座,所述驱动电机适于通过齿轮组驱动所述锁舌伸缩;方钢连接座上适于连接把手以控制所述锁舌伸缩,其特征在于,还包括:
2.根据权利要求1所述的把手式智能门锁,其特征在于,所述拨块包括第一拨块和第二拨块;
3.根据权利要求2所述的把手式智能门锁,其特征在于,所述第一拨脚与所述第一拨块、第二拨块接触一侧呈弧面,所述第一拨块、第二拨块在所述弧面上滑动,以推动所述第二电机拨片相对所述壳体转动。
4.根据权利要求1-3中任一项所述的把手式智能门锁,其特征在于,在所述方钢连接座沿上锁方向转动时,所述第一电机拨片随所述方钢连接座同步转动,以推动所述锁舌伸出所述壳体。
5.根据权利要求1-3中任一项所述的把手式智能门锁,其特征在于,还包括锁舌拨片,其套设在所述方钢连接座上,所述锁舌拨片上设有适于滑动设置在锁舌凹槽内的第三拨块;
6.根据权利要求5所述的把手式智能门锁,其特征在于,还包括:
7.根据权利要求6所述的把手式智能门锁,其特征在于,在所述方钢连接座沿上锁方向转动以推动所述锁舌伸出所述壳体时,所述锁舌拨片受所述锁舌带动以复位,且所述锁舌拨片经所述第四拨块带动所述翘杆、所述拉手拨片复位。
8.根据权利要求6所述的把手式智能门锁,其特征在于,所述翘杆与拉手拨片相抵接处均呈折弯状,以相互扣合。
9.根据权利要求6所述的把手式智能门锁,其特征在于,所述第三拨块、第四拨块设于所述锁舌拨片相对两侧,且所述第三拨块、第四拨块可相对锁舌拨片本体转动。
10.根据权利要求6所述的把手式智能门锁,其特征在于,所述锁舌拨片与所述方钢连接座套设处设有圆形通孔,以使所述锁舌拨片可独立转动;
技术总结
本发明提供一种把手式智能门锁,包括壳体、驱动电机、锁舌、方钢连接座、第一电机拨片、第二电机拨、锁舌拨片、拉手拨片和翘杆,通过设置第一电机拨片、第二电机拨片,在方钢连接座在把手带动下沿开锁方向或上锁方向转动时,由于第一电机拨片与所述方钢连接座同步运动,通过第一电机拨片上拨块推动所述第一拨脚带动所述第二拨脚相对壳体转动,由于第二拨脚与所述驱动电机抵接,进而可通过第二拨脚推动所述驱动电机运动直至与所述齿轮组分离。避免在通过把手驱动开锁时,需要克服电机自身阻力才能完成开锁动作,使得操作开锁的力较大,影响客户的使用体验。
技术研发人员:吕一鸣,龚纯全,傅一喆
受保护的技术使用者:王力安防科技股份有限公司
技术研发日:
技术公布日:2024/4/8
- 还没有人留言评论。精彩留言会获得点赞!