发电机定子巡检不抽转子的蛇形检测爬行机及制备方法
本发明属于爬行蛇形检测爬行机,特别是发电机定子巡检不抽转子的蛇形检测爬行机及方法。
背景技术:
1、目前,工业生产和日常生活中经常需要对一些具有垂直或倾斜面的大型罐体、管壁或大型机械设备等进行检测或探伤。然而,这些检测工作通常需要在恶劣环境下进行,或者由于受到高度限制,无法进行直接的人工检测。为了解决这一问题,爬壁机器人应运而生。爬壁机器人是一类特殊的机器人,具备在倾斜、垂直壁面等恶劣环境下进行特种作业的能力,能够胜任危险、繁重及人力所不及的工作,例如油罐罐壁的检测清理、核设备的探伤、高层幕墙的清洗、焊接、除锈、喷涂等工作。在电力行业中,发电机作为电站的核心设备之一,长时间运行后可能会出现定子槽楔松动、绝缘损坏和铁心磨损等问题。这些问题的存在可能会危及发电机的安全运行,甚至导致电机运行事故。因此,对发电机定子膛内部的槽楔松紧状态、绝缘状态和铁心磨损情况进行定期检测对于保证电机的正常运行具有重要意义。
2、然而,传统的检测方法需要抽出发电机转子,并由工人携带检测设备进入发电机内部进行检测。这种方法不仅耗费大量的人力物力,而且检测周期长,还会导致停产损失较大。因此,亟需一种能够在不拆卸转子的情况下进行定子巡检的机器人,以提高工作效率和降低人力成本。
技术实现思路
1、为了解决传统巡检方法需要拆卸转子、耗时耗力的问题,从而实现在不拆卸转子的情况下对发电机内部进行高效、精确的检测,本发明提供了发电机定子巡检不抽转子的蛇形检测爬行机及方法,具备智能越障和爬壁功能,能够在发电机内部自主巡检,并实现对定子槽楔松紧状态、绝缘状态和铁心磨损情况的全方位检测。通过该蛇形检测爬行机的应用,能够大幅提高发电机定子巡检的效率,减少人工干预,降低安全风险,同时最大程度地保障电机的正常运行和生产效率。
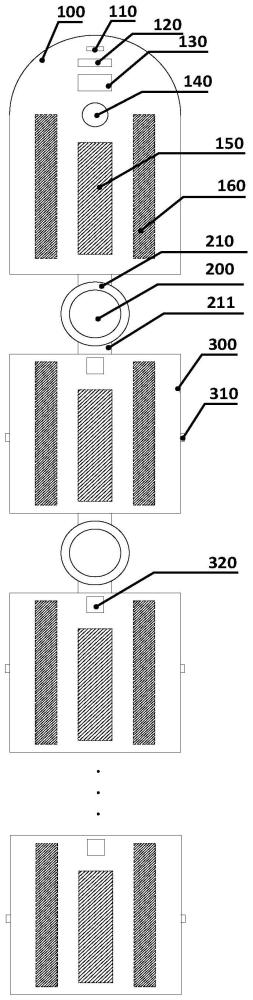
2、发电机定子巡检不抽转子的蛇形检测爬行机包括:
3、蛇头,其包括,
4、感知系统,其包括,
5、照明系统,其设于所述蛇头以在发电机内提供照明,
6、摄像系统,其设于所述蛇头以实时采集发电机内的图像数据;
7、超声波定位传感器,其设于所述蛇头以检测前方障碍物与蛇形检测爬行机的距离信息;
8、运动系统,其包括,
9、第一可变吸附力电磁铁,其设于所述蛇头以经由控制电磁铁的电流调节蛇形检测爬行机与发电机之间的吸附力大小,
10、第一传输履带,其设于所述蛇头的底部,
11、控制系统,其包括,
12、图像识别处理单元,其连接所述摄像系统以基于所述图像数据识别发电机的内部结构,所述图像数据包括发电机定子的内部结构的图像,所述内部结构包括挡风板、凸起部分和槽底绕组,所述图像识别处理单元基于深度学习神经网络实时分析采集到的图像数据以识别发电机定子的挡风板、凸起部分和槽底绕组,
13、路径规划单元,其连接所述超声波定位传感器和图像识别处理单元以基于距离信息和内部结构规划路径,路径规划单元基于所述距离信息和内部结构的图像,制定机器人的运动路径,
14、运动控制单元,其连接所述路径规划单元和运动系统以基于所述路径可控地在行进方向上运动,
15、至少一个连接轴,其连接于蛇头与蛇身之间,或连接于蛇身与另一个蛇身之间,所述连接轴设有控制其扭转角度的舵机,
16、至少一个蛇身,其经由连接轴可拆卸连接蛇头或另一个蛇身,所述蛇身包括,
17、压力传感器,其设于所述蛇身的侧壁以测量蛇身与障碍物的接触的压力数据,
18、第二可变吸附力电磁铁,其设于所述蛇身以经由控制电磁铁的电流调节蛇形检测爬行机与发电机之间的吸附力大小,
19、第二传输履带,其设于所述蛇身底部。
20、所述的发电机定子巡检不抽转子的蛇形检测爬行机中,当蛇形检测爬行机需要换向时,第一可变吸附力电磁铁和/或第二可变吸附力电磁铁的吸力逐渐减弱。
21、所述的发电机定子巡检不抽转子的蛇形检测爬行机中,所述的蛇形检测爬行机沿发电机定子槽定向移动。
22、所述的发电机定子巡检不抽转子的蛇形检测爬行机中,所述蛇身两侧附带有压力传感器。
23、所述的发电机定子巡检不抽转子的蛇形检测爬行机中,所述运动控制单元连接所述压力传感器连接、舵机、第二可变吸附力电磁铁和第二传输履带。
24、所述的发电机定子巡检不抽转子的蛇形检测爬行机中,所述图像识别处理单元采用深度学习算法识别定子表面的挡风板、凸起部分和槽底绕组。
25、所述的发电机定子巡检不抽转子的蛇形检测爬行机中,所述图像数据包括反映定子槽楔、绝缘状态和铁心磨损的图像。
26、所述的发电机定子巡检不抽转子的蛇形检测爬行机中,照明系统包括led灯。
27、所述的发电机定子巡检不抽转子的蛇形检测爬行机中,蛇形检测爬行机为蛇形结构。
28、所述的发电机定子巡检不抽转子的蛇形检测爬行机的检测方法包括,
29、蛇形检测爬行机沿发电机定子槽定向移动,照明系统在发电机内提供照明,摄像系统实时采集发电机内的图像数据并保存传输;
30、超声波定位传感器检测前方障碍物与蛇形检测爬行机的距离信息,路径规划单元基于距离信息和图像数据规划路径,运动控制单元基于所述路径可控地在行进方向上运动,当运动控制单元基于图像识别结合超声波传感器测距信号判断存在障碍物,路径规划单元重新规划路径进行避障;
31、经由所述图像数据检测发电机定子。
32、和现有技术相比,本发明具有以下优点:
33、发电机定子巡检不抽转子的蛇形检测爬行机具备智能越障和爬壁功能,能够在发电机内部自主巡检,并实现对定子槽楔松紧状态、绝缘状态和铁心磨损情况的全方位检测。通过该蛇形检测爬行机的应用,能够大幅提高发电机定子巡检的效率,减少人工干预,降低安全风险,同时最大程度地保障电机的正常运行和生产效率。发电机定子巡检不抽转子的蛇形检测爬行机实现智能越障爬壁蛇形检测爬行机的自动化控制与操作,大大提高了电动机巡检的效率和精度,实现定子膛内全面巡检,无需停机,大大提高了电动机巡检的效率和准确性,同时具备更广泛的适用性和应用价值。
技术特征:
1.一种发电机定子巡检不抽转子的蛇形检测爬行机,其特征在于,其包括:
2.根据权利要求1所述的发电机定子巡检不抽转子的蛇形检测爬行机,其特征在于,优选的,当蛇形检测爬行机需要换向时,第一可变吸附力电磁铁和/或第二可变吸附力电磁铁的吸力逐渐减弱。
3.根据权利要求1所述的发电机定子巡检不抽转子的蛇形检测爬行机,其特征在于,所述的蛇形检测爬行机沿发电机定子槽定向移动。
4.根据权利要求1所述的发电机定子巡检不抽转子的蛇形检测爬行机,其特征在于,所述蛇身两侧附带有压力传感器。
5.根据权利要求1所述的发电机定子巡检不抽转子的蛇形检测爬行机,其特征在于,所述运动控制单元连接所述压力传感器连接、舵机、第二可变吸附力电磁铁和第二传输履带。
6.根据权利要求1所述的发电机定子巡检不抽转子的蛇形检测爬行机,其特征在于,所述图像识别处理单元采用深度学习算法识别定子表面的挡风板、凸起部分和槽底绕组。
7.根据权利要求1所述的发电机定子巡检不抽转子的蛇形检测爬行机,其特征在于,所述图像数据包括反映定子槽楔、绝缘状态和铁心磨损的图像。
8.根据权利要求1所述的发电机定子巡检不抽转子的蛇形检测爬行机,其特征在于,照明系统包括led灯。
9.根据权利要求1所述的发电机定子巡检不抽转子的蛇形检测爬行机,其特征在于,蛇形检测爬行机为蛇形结构。
10.一种根据权利要求1-9中任一项所述的发电机定子巡检不抽转子的蛇形检测爬行机的检测方法,其特征在于,其包括,
技术总结
一种发电机定子巡检不抽转子的蛇形检测爬行机及方法,蛇形检测爬行机中,摄像系统设于蛇头以实时采集发电机内的图像数据;超声波定位传感器设于蛇头以检测前方障碍物与蛇形检测爬行机的距离信息;第一可变吸附力电磁铁设于蛇头以经由控制电磁铁的电流调节蛇形检测爬行机与发电机之间的吸附力大小,图像识别处理单元连接摄像系统以基于图像数据识别发电机的内部结构,路径规划单元连接超声波定位传感器和图像识别处理单元以基于距离信息和内部结构规划路径;至少一个连接轴连接于蛇头与蛇身之间,或连接于蛇身与另一个蛇身之间,连接轴设有控制其扭转角度的舵机,至少一个蛇身经由连接轴可拆卸连接蛇头或另一个蛇身。
技术研发人员:刘轩东,史万豪,张灵宝,孙瑛蔓,赵越
受保护的技术使用者:西安交通大学
技术研发日:
技术公布日:2024/4/8
- 还没有人留言评论。精彩留言会获得点赞!