物体抓取系统的制作方法
所属的技术人员能够理解,本发明的各个方面可以实现为系统、方法或程序产品。因此,本发明的各个方面可以具体实现为以下形式,即:完全的硬件实施方式、完全的软件实施方式(包括固件、微代码等),或硬件和软件方面结合的实施方式,这里可以统称为“电路”、“模块”或“平台”。图12是本发明实施例中物体抓取姿态识别设备的结构示意图。下面参照图12来描述根据本发明中这种实施方式的电子设备600。图12显示的电子设备600仅仅是一个示例,不应对本发明实施例的功能和使用范围带来任何限制。如图12所示,电子设备600以通用计算设备的形式表现。电子设备600的组件可以包括但不限于:至少一个处理单元610、至少一个存储单元620、连接不同平台组件(包括存储单元620和处理单元610)的总线630、显示单元640等。其中,存储单元存储有程序代码,程序代码可以被处理单元610执行,使得处理单元610执行本说明书上述物体抓取系统部分中描述的根据本发明各种示例性实施方式的步骤。例如,处理单元610可以执行如图11中所示的步骤。存储单元620可以包括易失性存储单元形式的可读介质,例如随机存取存储单元(ram)6201和/或高速缓存存储单元6202,还可以进一步包括只读存储单元(rom)6203。存储单元620还可以包括具有一组(至少一个)程序模块6205的程序/实用工具6204,这样的程序模块6205包括但不限于:操作系统、一个或者多个应用程序、其它程序模块以及程序数据,这些示例中的每一个或某种组合中可能包括网络环境的实现。总线630可以为表示几类总线结构中的一种或多种,包括存储单元总线或者存储单元控制器、外围总线、图形加速端口、处理单元或者使用多种总线结构中的任意总线结构的局域总线。电子设备600也可以与一个或多个外部设备700(例如键盘、指向设备、蓝牙设备、相机、深度相机等)通信,还可与一个或者多个使得用户能与该电子设备600交互的设备通信,和/或与使得该电子设备600能与一个或多个其它计算设备进行通信的任何设备(例如路由器、调制解调器等等)通信。这种通信可以通过输入/输出(i/o)接口650进行。并且,电子设备600还可以通过网络适配器660与一个或者多个网络(例如局域网(lan),广域网(wan)和/或公共网络,例如因特网)通信。网络适配器660可以通过总线630与电子设备600的其它模块通信。应当明白,尽管图12中未示出,可以结合电子设备600使用其它硬件和/或软件模块,包括但不限于:微代码、设备驱动器、冗余处理单元、外部磁盘驱动阵列、raid系统、磁带驱动器以及数据备份存储平台等。本发明实施例中还提供一种计算机可读存储介质,用于存储程序,程序被执行时实现的物体抓取系统的步骤。在一些可能的实施方式中,本发明的各个方面还可以实现为一种程序产品的形式,其包括程序代码,当程序产品在终端设备上运行时,程序代码用于使终端设备执行本说明书上述物体抓取系统部分中描述的根据本发明各种示例性实施方式的步骤。如上所示,该实施例的计算机可读存储介质的程序在执行时,通过获取目标物体的2d图像,并在所述2d图像上确定roi区域以及相应的目标点云,确定所述roi区域的最长轴,根据所述roi区域的最长轴确定包围盒,根据所述包围盒以及根据点云确定抓取高度确定所述目标物体吸取点或抓取点,实现顶部出液嘴为长条形的物体如按压瓶的吸取或抓取。图13是本发明实施例中的计算机可读存储介质的结构示意图。参考图13所示,描述了根据本发明的实施方式的用于实现上述方法的程序产品800,其可以采用便携式紧凑盘只读存储器(cd-rom)并包括程序代码,并可以在终端设备,例如个人电脑上运行。然而,本发明的程序产品不限于此,在本文件中,可读存储介质可以是任何包含或存储程序的有形介质,该程序可以被指令执行系统、装置或者器件使用或者与其结合使用。程序产品可以采用一个或多个可读介质的任意组合。可读介质可以是可读信号介质或者可读存储介质。可读存储介质例如可以为但不限于电、磁、光、电磁、红外线、或半导体的系统、装置或器件,或者任意以上的组合。可读存储介质的更具体的例子(非穷举的列表)包括:具有一个或多个导线的电连接、便携式盘、硬盘、随机存取存储器(ram)、只读存储器(rom)、可擦式可编程只读存储器(eprom或闪存)、光纤、便携式紧凑盘只读存储器(cd-rom)、光存储器件、磁存储器件、或者上述的任意合适的组合。计算机可读存储介质可以包括在基带中或者作为载波一部分传播的数据信号,其中承载了可读程序代码。这种传播的数据信号可以采用多种形式,包括但不限于电磁信号、光信号或上述的任意合适的组合。可读存储介质还可以是可读存储介质以外的任何可读介质,该可读介质可以发送、传播或者传输用于由指令执行系统、装置或者器件使用或者与其结合使用的程序。可读存储介质上包含的程序代码可以用任何适当的介质传输,包括但不限于无线、有线、光缆、rf等等,或者上述的任意合适的组合。可以以一种或多种程序设计语言的任意组合来编写用于执行本发明操作的程序代码,程序设计语言包括面向对象的程序设计语言—诸如java、c++等,还包括常规的过程式程序设计语言—诸如“c”语言或类似的程序设计语言。程序代码可以完全地在用户计算设备上执行、部分地在用户设备上执行、作为一个独立的软件包执行、部分在用户计算设备上部分在远程计算设备上执行、或者完全在远程计算设备或服务器上执行。在涉及远程计算设备的情形中,远程计算设备可以通过任意种类的网络,包括局域网(lan)或广域网(wan),连接到用户计算设备,或者,可以连接到外部计算设备(例如利用因特网服务提供商来通过因特网连接)。本发明实施例中,通过获取目标物体的2d图像,并在所述2d图像上确定roi区域以及相应的目标点云,确定所述roi区域的最长轴,根据所述roi区域的最长轴确定包围盒,根据所述包围盒以及根据点云确定抓取高度确定所述目标物体吸取点或抓取点,实现顶部出液嘴为长条形的物体如按压瓶的吸取或抓取;通过主成分分析将roi区域的外轮廓线转换为一特征向量空间中的多个特征向量确roi区域的最长轴,进而对所述roi区域生成沿所述roi区域的最长轴对称的包围盒,以实现吸取点或抓取点的准确计算。本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变形或修改,这并不影响本发明的实质内容。
背景技术:
1、分拣机器人(sorting robot),是一种具备了传感器、物镜和电子光学系统的机器人,可以快速进行货物分拣。
2、现有的分拣机器人抓取瓶状物往往采用将瓶状物放倒,然后通过吸盘式夹具吸取的方式实现抓取。但实际场景中存在可能没有放倒空间的情况,如瓶状物紧密排列、瓶状物所处位置空间狭窄等情形。
3、此外,对于小口径瓶状物,由于小口径瓶状物的顶部抓取空间小,因此需要对小口径瓶状物的顶部抓取空间进行准确的识别,才能够实现小口径瓶状物的抓取或吸取,但是现有技术的尚没有能够小口径瓶状物准确识别的方法,因此对于重量较大的小口径瓶状物,无论是机械手还是吸盘往往都不具备相应的抓取能力。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种物体抓取系统。
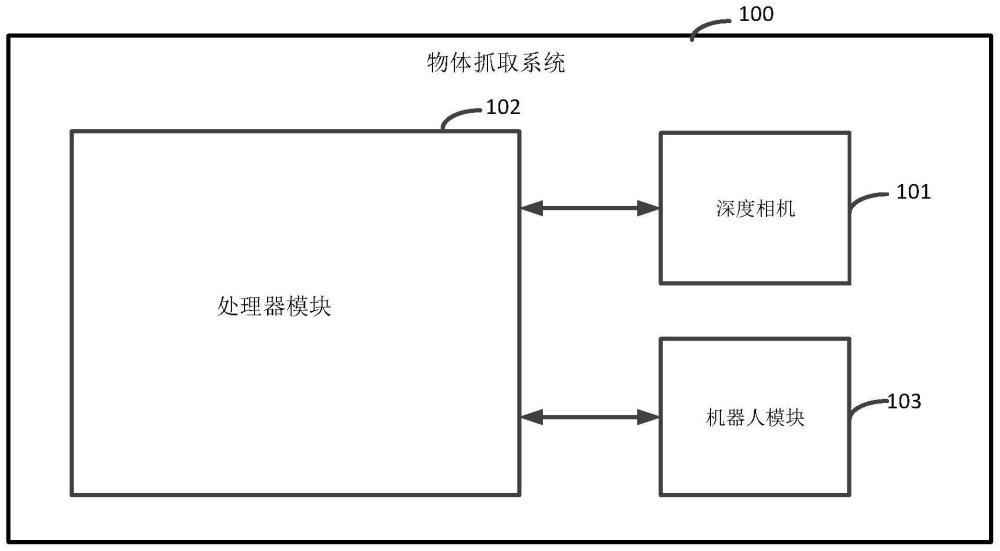
2、根据本发明提供的物体抓取系统,包括:
3、深度相机,包括投影机和光接收传感器,所述投影机用于向垂直放置的目标物体垂直投射结构光,所述光接收传感器用于接收所述目标物体反射后的所述结构光生成俯视所述目标物体方向的点云图;
4、处理器模块,用于获取目标物体的点云图,并在所述点云图上截取roi区域以确定第一目标点云,确定所述第一目标点云的最长轴,根据所述第一目标点云的最长轴确定所述第一目标点云在最长轴方向的对称,根据所述对称轴确定所述目标物体的吸取点或抓取点;
5、机器人模块,用于根据所述目标物体的吸取点或抓取点对所述目标物体的进行吸取或抓取。
6、优选地,所述处理器模块包括:
7、点云获取单元,用于获取目标物体的点云图,并在所述点云图上截取roi区域以确定第一目标点云;
8、最长轴确定单元,用于确定所述第一目标点云的最长轴;
9、点位确定单元,用于根据所述第一目标点云的最长轴确定所述第一目标点云在最长轴方向的对称,进而根据所述对称轴确定所述目标物体吸取点或抓取点。
10、优选地,所述点云获取单元包括如下部分:
11、点云获取部,用于获取所述第一目标点云;
12、主成分分析部,用于对所述第一目标点云进行主成分分析将第一目标点云转换为一特征向量空间中的多个特征向量;
13、轴向确定部,用于根据所述特征向量确定所述第一目标点云的最长轴和最短轴。
14、优选地,所述点位确定单元包括如下部分:
15、点云位置调整部,用于将所述第一目标点云的最长轴朝向所述特征向量空间的x轴,所述roi区域的最短轴朝向所述特征向量空间的z轴;
16、对称轴确定部,用于根据所述第一目标点云的最长轴确定所述第一目标点云在最长轴方向的对称轴;
17、点位确定部,用于根据所述对称轴确定所述目标物体吸取点或抓取点。
18、优选地,所述对称轴确定部包括如下部分:
19、镜面翻转分部,用于将所述第一目标点云沿xz平面镜面翻转生成第二目标点云,同时确定所述翻转时的翻转矩阵;
20、点云配准分部,用于将所述第一目标点云和所述第二目标点云进行配准,生成第三目标点云,同时确定所述第一目标点云在配准时的旋转矩阵;
21、法向量确定分部,用于根据所述第一目标点云和所述第三目标点云上相对应的两个点确定对称轴的法向量;
22、目标点确定分部,用于根据所述第一目标点云、所述翻转矩阵以及所述旋转矩阵确定对称轴上的目标点;
23、对称轴确定分部,用于根据所述对称轴的法向量和所述目标点确定所述对称轴的位置。
24、优选地,所述对称轴确定部包括如下部分:
25、镜面翻转分部,用于将所述第一目标点云沿xz平面镜面翻转生成第二目标点云;
26、点云配准分部,用于将所述第一目标点云和所述第二目标点云进行配准,生成沿所述特征向量空间的x轴对称的第三目标点云,同时确定所述第一目标点云在配准时的旋转矩阵;
27、对称轴确定分部,用于确定所述第三目标点云的对称轴,进而根据所述旋转矩阵确定所述第一目标点云的对称轴。
28、优选地,所述点云位置调整部用于控制所述第一目标点云的最长轴尽可能与所述特征向量空间的x轴朝向一致,将所述roi区域的最短轴尽可能与所述特征向量空间的z轴朝向一致。
29、优选地,所述投影机用于向垂直放置的按压瓶垂直投射结构光,所述光接收传感器用于接收所述按压瓶反射后的所述结构光生成俯视所述按压瓶方向的点云图;
30、所述roi区域为所述点云图中所述按压瓶上顶部出液嘴的区域。
31、优选地,在确定包括所述按压瓶上顶部出液嘴的roi区域时,通过rgb相机采集俯视所述按压瓶方向的rgb图像,所述rgb图像和所述点云图对齐;先通过深度学习模型在所述rgb图像识别出包括所述按压瓶上顶部出液嘴的roi区域,然后再在所述点云图上确定出包括所述按压瓶上顶部出液嘴的roi区域。
32、优选地,所述机器人模块包括末端执行器,通过所述末端执行器对所述目标物体的进行抓取;
33、所述末端执行器为气囊夹具,所述气囊夹具包括:
34、夹具座,开设有安装位;
35、气囊,设于所述安装位;且所述气囊的侧壁形成一夹持空间,充气状态下所述气囊的外侧壁受到所述夹具座施加的径向支撑力,所述气囊的内侧壁径向向内膨胀以夹持待夹持物;
36、所述夹具座上设有第一避让缺口,所述气囊上对应所述第一避让缺口的位置设有第二避让缺口;所述第一避让缺口和第二避让缺口用作所述出液嘴的移动通道以使所述出液嘴进入所述夹持空间。
37、与现有技术相比,本发明具有如下的有益效果:
38、本发明中通过获取目标物体的2d图像,并在所述2d图像上确定roi区域以及相应的目标点云,确定所述roi区域的最长轴,根据所述roi区域的最长轴确定包围盒,根据所述包围盒以及根据点云确定抓取高度确定所述目标物体吸取点或抓取点,实现顶部出液嘴为长条形的物体如按压瓶的吸取或抓取;
39、本发明中通过主成分分析将roi区域的外轮廓线转换为一特征向量空间中的多个特征向量确roi区域的最长轴,进而对所述roi区域生成沿所述roi区域的最长轴对称的包围盒,以实现吸取点或抓取点的准确计算。
- 还没有人留言评论。精彩留言会获得点赞!