一种机械抓手的运行方法与流程
本发明涉及机械制造,具体涉及一种机械抓手的运行方法。
背景技术:
1、机械抓手主要用于将目标物从一个地方转移到另一个地方。目前,传统机械抓手中抓取部位的机械动作是需要驱动器驱动的。驱动器驱动方式可分为气、液或电驱动,气、液驱动装置需要气泵、阀体及管路等,电驱动装置则需要电动机、传动机构及线路等。当抓取部位在抓取和放置目标物时,驱动器驱动抓取部位做收紧或放松或顶杆上下等机械动作,驱动器不仅使整个机械抓手结构复杂,而且还大大提高了成本。
2、当今世界能源的利用率已经成为主题之一。因此,如何能在实现功能的情况下提高能源的利用率,已经成为提高产品竞争力的主要手段之一。目前传统机械抓手,无论驱动器采用气、液或电驱动中的哪一种驱动方式来实现抓取和放置物体的目的,均会增加整体仪器的能源损耗。
3、在工业智能制造的趋势下,机械抓手用于实现目标物的转移,普遍应用于多个领域,如医疗器械领域,石油化工领域及汽车制造领域等等。
4、如医疗器械领域,化学发光免疫分析是利用化学发光剂直接标记抗原或抗体的免疫分析的方法,是将具有高灵敏度的化学发光测定技术与高特异性的免疫反应相结合,用于各种抗原、半抗原、抗体、激素、酶、脂肪酸、维生素和药物等的检测分析技术。化学发光免疫在分析检测项目时试剂数量较多(往往为3个及以上)且为多个机械抓手同时协调工作,这就要求它在工作时尽量缩短抓取和放置反应杯剂杯的时间,并且其机械结构简单可靠。
5、现有技术条件下,机械抓手的专利有很多,以下列举几种不同形式的物体抓取装置。
6、cn108098811a《一种机械抓手》提出了一种气驱动机械抓手;该发明利用支撑架顶部的气缸来驱使活塞杆做活塞运动,通过与活塞杆连接的拉杆和支撑架两侧的导向槽来带动移动臂的移动,从而实现夹板的开与合。
7、cn207155823u《一种机械抓手》提出一种电驱动机械抓手;该发明利用驱动电机驱使旋转轴转动来带动开合杆前后移动,使机械臂张开或闭合。
8、cn207480627u《一种机械抓手》提出一种液压驱动机械抓手;该发明利用安装在机械臂侧面的两个翻转油缸和几根轴的运动来带动卡板的夹紧或者放松。
9、现有技术方案的机械抓手中抓取部分的机械动作都需要一个驱动器来驱动机构的开与合,实现抓取和放置目标物的目的,但驱动器会增加机械抓手的成本。
技术实现思路
1、本发明所要解决的技术问题是克服背景技术的技术缺陷,提供一种机械抓手。本发明机械抓手能够在省去抓取部位驱动器的情况下实现自动抓取和放置物体;本发明在降低机械抓手成本、减小故障点及简化结构等前提下,能提高机械抓手整体的运行速度。
2、本发明解决上述技术问题所采用的技术方案如下:
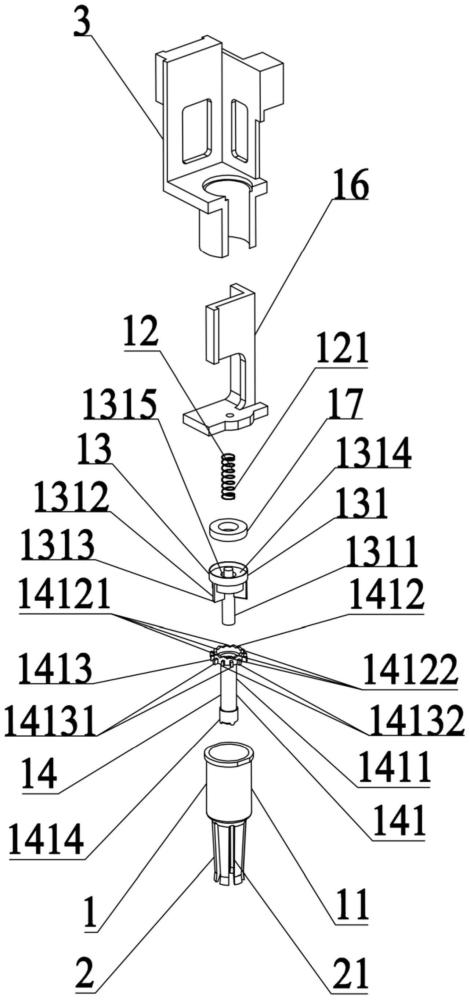
3、一种机械抓手,所述机械抓手包括抓手本体、以及与所述抓手本体连接的抓头;所述抓手本体包括壳体、设置于所述壳体内部并且沿所述壳体的轴向自上而下顺次连接的弹性装置、转动卡接装置和传动导向装置、以及设置于所述壳体内表面的导向卡接装置。
4、进一步地,所述机械抓手通过所述抓头抓取物体;所述物体通过与所述传动导向装置的接触将作用力由所述传动导向装置传导至所述弹性装置并逐渐累积弹性势能;由所述转动卡接装置与所述导向卡接装置的卡接作用使得所述弹性装置产生的弹性势能得到保留;所述机械抓手向下放置所述物体时所述物体再次通过与所述传动导向装置的接触将作用力由所述传动导向装置传导至所述弹性装置;在所述弹性装置内部的弹性势能的驱动下,所述转动卡接装置通过所述传动导向装置将作用力反向传导至所述物体,使得所述物体脱离所述抓头,所述机械抓手完成放置物体过程。
5、进一步地,所述转动卡接装置包括转子;所述转子包括支撑柱、以及周向间隔设置于所述支撑柱外表面的若干个转动卡接板。
6、进一步地,所述转子包括设置于所述转动卡接板底部的倾斜的啮合面;所述转动卡接板周向均匀间隔设置于所述支撑柱外表面。
7、进一步地,所述传动导向装置包括推杆;所述推杆包括中部中空的与所述支撑柱匹配套接的套接杆、周向设置于所述套接杆顶部的导向齿、以及周向间隔设置于所述导向齿外表面的若干个导向柱。
8、进一步地,所述导向齿呈均匀分布的锯齿形;所述导向齿的齿尖与所述啮合面不完全啮合;所述导向柱包括第一导向柱和第二导向柱;所述第一导向柱和所述第二导向柱周向均匀间隔设置于所述导向齿外表面;沿所述壳体的径向,所述第一导向柱的长度长于所述第二导向柱;沿所述壳体的轴向,所述第一导向柱的外侧面与所述转动卡接板的外侧面同轴。
9、进一步地,所述导向卡接装置包括周向间隔设置于所述壳体内表面并且由所述壳体的内表面外凸形成的导向凸台、设置于相邻所述导向凸台之间的导向槽、设置于所述导向凸台上表面的导向面、以及设置于所述导向凸台上部的卡接槽;所述导向槽容纳所述导向柱以及所述转动卡接板。
10、进一步地,所述导向凸台包括沿所述壳体的周向顺次连接的第一导向凸台、第二导向凸台和第三导向凸台;所述导向凸台周向均匀间隔设置于所述壳体内表面;所述第一导向凸台和所述第三导向凸台的形状相同;所述第一导向凸台和所述第三导向凸台沿所述壳体的轴向的长度长于所述第二导向凸台;所述导向槽包括第一导向槽和第二导向槽;相邻的所述第一导向凸台的外侧面、所述第三导向凸台的外侧面和所述壳体的内表面形成所述第一导向槽;所述第一导向凸台的外侧面、所述第三导向凸台的外侧面和所述第二导向凸台的外侧面形成所述第二导向槽;所述第一导向槽的深度深于所述第二导向槽;所述第一导向槽容纳所述第一导向柱和所述转动卡接板;所述第二导向槽容纳所述第二导向柱;所述导向面包括第一导向面和第二导向面;所述第一导向凸台和所述第二导向凸台的上表面连接形成倾斜的所述第一导向面;所述第三导向凸台的上表面形成倾斜的所述第二导向面;所述第一导向面和所述第二导向面的倾角分别与所述啮合面的倾角相同;所述第二导向凸台的上表面、所述第三导向凸台的外侧面和所述壳体的内表面形成所述卡接槽。
11、进一步地,所述抓手本体包括与所述壳体的顶部连接的抓手盖板。
12、进一步地,所述抓手本体包括磁环。
13、进一步地,所述弹性装置包括弹簧。
14、一种机械抓手的运行方法,包括如下步骤:
15、(1)抓取被抓物体时,机械抓手对被抓物体施加作用力,同时,所述被抓物体对所述机械抓手施加反作用力,所述机械抓手借由所述反作用力在内部累积弹性势能;
16、(2)放置被抓物体时,所述机械抓手对被抓物体施加作用力,同时,所述被抓物体对所述机械抓手施加反作用力,所述机械抓手借由所述反作用力释放内部累积的弹性势能,实现放置被抓物体。
17、进一步地,所述步骤(1)中,所述机械抓手向下运动与位于所述机械抓手外部的被抓物体接触,所述机械抓手对所述被抓物体产生向下的作用力,相应地,所述被抓物体对所述机械抓手产生向上的反作用力,所述机械抓手借由所述反作用力在内部累积弹性势能。
18、进一步地,所述步骤(2)中,所述机械抓手向下运动与位于所述机械抓手内部的被抓物体接触,所述机械抓手对所述被抓物体产生向下的作用力,相应地,所述被抓物体对所述机械抓手产生向上的反作用力,所述机械抓手借由所述反作用力释放内部累积的弹性势能,实现放置被抓物体。
19、上述技术方案中,所述若干个为≥1个。
20、与现有技术相比,本发明的有益效果是:
21、本发明机械抓手能够在省去抓取部位驱动器的情况下实现自动抓取和放置物体;本发明在降低机械抓手成本、减小故障点及简化结构等前提下,能提高机械抓手整体的运行速度。
- 还没有人留言评论。精彩留言会获得点赞!