机器人标定方法、系统及机器人与流程
本发明涉及机器人标定,具体而言,涉及一种机器人标定方法、系统及机器人。
背景技术:
1、机器人标定技术是提高机器人末端绝对定位精度的重要方法。以并联六轴机器人hexapod为例,其机械结构由上下平台及六根驱动连杆构成,其下平台为固定平台,上平台为运动平台,通过改变六根驱动连杆的长度,实现上平台抵达不同的空间位姿。
2、然而实际生产的机器人,由于各种原因,其实际机械结构会存在不同程度的误差,若机器人控制仅依据理论模型进行控制,则会产生不同程度的误差,无法达到实际的控制效果。
3、传统标定方案,其构建完机器人模型后,辨识出误差参数,并代入测量点位进入迭代,以此寻求迭代出最优解。但传统模型算法迭代出的数据往往呈现出一定的发散特性,或陷入局部震荡,迭代效果往往无法达到目标预期。
技术实现思路
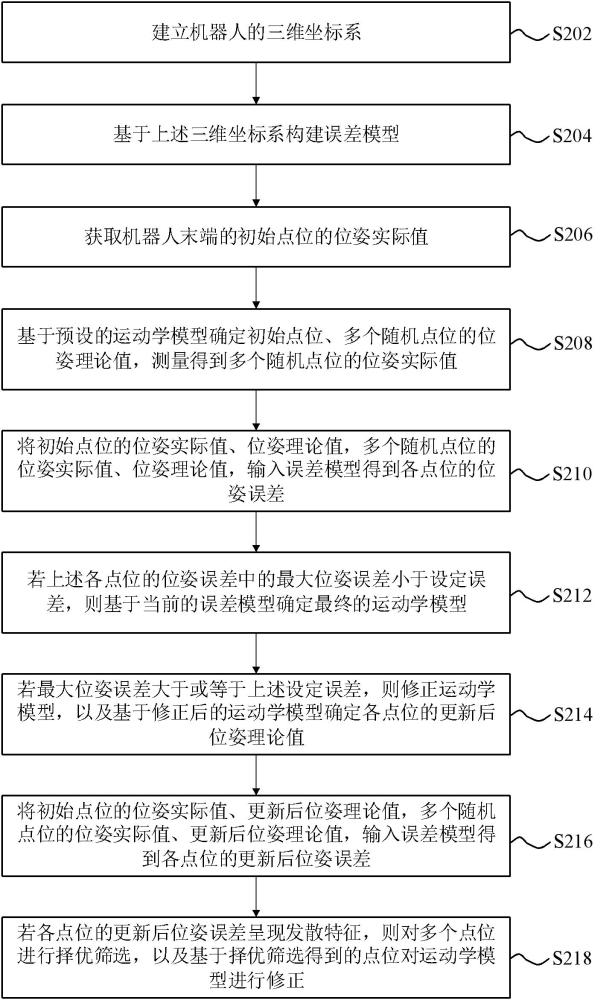
1、本发明的目的在于提供一种机器人标定方法,所述方法包括:建立机器人的三维坐标系;基于所述三维坐标系构建误差模型;获取机器人末端的初始点位的位姿实际值;基于预设的运动学模型确定所述初始点位、多个随机点位的位姿理论值,测量得到所述多个随机点位的位姿实际值;将所述初始点位的位姿实际值、位姿理论值,所述多个随机点位的位姿实际值、位姿理论值,输入所述误差模型得到各所述点位的位姿误差;若各所述点位的位姿误差中的最大位姿误差小于设定误差,则基于当前的误差模型确定最终的运动学模型;若所述最大位姿误差大于或等于所述设定误差,则修正所述运动学模型,以及基于修正后的运动学模型确定各所述点位的更新后位姿理论值;将所述初始点位的位姿实际值、更新后位姿理论值,所述多个随机点位的位姿实际值、更新后位姿理论值,输入所述误差模型得到各所述点位的更新后位姿误差;若各所述点位的更新后位姿误差呈现发散特征,则对多个所述点位进行择优筛选,以及基于择优筛选得到的点位对所述运动学模型进行修正。
2、可选地,所述若各所述点位的更新后位姿误差呈现发散特征,则对多个所述点位进行择优筛选,包括:若各所述点位的更新后位姿误差中的最大位姿误差大于上一阶段最大位姿误差,则确定为更新后位姿误差呈现发散特征;根据各所述点位的更新后位姿误差是否小于同一点位的所述上一阶段对应的位姿误差进行择优筛选;若所述点位的更新后位姿误差小于所述上一阶段对应的位姿误差,则保留对应的所述点位。
3、可选地,所述基于择优筛选得到的点位对所述运动学模型进行修正,包括:基于保留的所述点位对所述误差模型的误差矩阵元素进行更新,对未保留的所述点位则保留所述上一阶段对应的误差矩阵元素;基于更新后的所述误差模型对所述运动学模型进行修正。
4、可选地,所述方法还包括:若所述误差模型的误差矩阵元素在多次迭代后无变化,则基于当前的误差模型确定最终的运动学模型。
5、可选地,所述方法还包括:根据各所述点位的位姿误差确定对应的误差矩阵元素。
6、可选地,所述机器人为hexapod并联机器人,所述hexapod并联机器人包括6根驱动连杆,所述误差模型包括所述6根驱动连杆的12个铰点的三维坐标误差。
7、可选地,所述三维坐标系取所述hexapod并联机器人的运动平台的中心点为坐标原点,z轴竖直向上,x轴指向第一轴的连接点。
8、本发明实施例提供一种机器人标定系统,包括控制器,所述控制器用于执行上述方法。
9、本发明实施例提供一种机器人,包括控制器、运动平台及支撑臂;所述控制器包括上述机器人标定系统。
10、本发明实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器读取并运行时,实现上述任一项所述的方法。
11、与现有技术相比,本发明的有益效果在于:
12、本发明实施例提供的机器人标定方法、系统及机器人,将初始点位加入误差模型,从而减小系统误差,提高收敛准确度;当计算误差不再趋于收敛时,择优点位,从而提高收敛精度,实现提高模型收敛稳定性。
技术特征:
1.一种机器人标定方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述若各所述点位的更新后位姿误差呈现发散特征,则对多个所述点位进行择优筛选,包括:
3.根据权利要求2所述的方法,其特征在于,所述基于择优筛选得到的点位对所述运动学模型进行修正,包括:
4.根据权利要求3所述的方法,其特征在于,所述方法还包括:
5.根据权利要求3所述的方法,其特征在于,所述方法还包括:
6.根据权利要求1所述的方法,其特征在于,所述机器人为hexapod并联机器人,所述hexapod并联机器人包括6根驱动连杆,所述误差模型包括所述6根驱动连杆的12个铰点的三维坐标误差。
7.根据权利要求6所述的方法,其特征在于,所述三维坐标系取所述hexapod并联机器人的运动平台的中心点为坐标原点,z轴竖直向上,x轴指向第一轴的连接点。
8.一种机器人标定系统,其特征在于,包括控制器,所述控制器用于执行权利要求1-7任一项所述的方法。
9.一种机器人,其特征在于,包括控制器、运动平台及支撑臂;所述控制器包括权利要求8所述的机器人标定系统。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器读取并运行时,实现权利要求1-7任一项所述的方法。
技术总结
本发明涉及机器人标定技术领域,具体而言,涉及一种机器人标定方法、系统及机器人,该方法包括:若基于误差模型计算的最大位姿误差大于或等于设定误差,则修正运动学模型,以及基于修正后的运动学模型确定各点位的更新后位姿理论值;将点位的位姿实际值、更新后位姿理论值,输入误差模型得到各点位的更新后位姿误差;若各点位的更新后位姿误差呈现发散特征,则对多个点位进行择优筛选,以及基于择优筛选得到的点位对运动学模型进行修正。本发明实施例将初始点位加入误差模型,从而减小系统误差,提高收敛准确度;当计算误差不再趋于收敛时,择优点位,从而提高收敛精度,实现提高模型收敛稳定性。
技术研发人员:胡向明,王科,张新生,郝佳佳,徐凯
受保护的技术使用者:深圳市大寰机器人科技有限公司
技术研发日:
技术公布日:2024/4/8
- 还没有人留言评论。精彩留言会获得点赞!