一种基于STM32的自平衡桌面机器人系统
本发明涉及桌面级服务机器人,尤其涉及一种可在狭小空间使用且具有一定扩展性、基于stm32的自平衡桌面机器人系统。
背景技术:
1、桌面小机器人通常用于桌面或室内环境,具有各种功能,例如互动、娱乐、助手任务等,其核心组成主要有以下两部分:配备各种传感器,如摄像头、声音传感器、手势传感器和红外线传感器,以感知周围环境和与用户进行互动。这些传感器使机器人能够检测声音和声音方向,识别人脸或物体等。具备人机交互界面,桌面级小机器人需要与用户进行互动,通常通过语音识别、语音合成、表情、动作或led灯等方式与用户交流。这涉及到语言处理、语音识别技术,以及用户界面设计。
2、桌面小机器人通常可以执行语音识别和语音合成,回答用户的问题、提供信息和执行任务;在屏幕上显示文本、图片或视频,以提供信息、新闻、天气预报和其他实用信息。目前市面上有较多轮式机器人,然而在桌面环境下,机器人的移动性并不至关重要,自平衡机器人反而具有它特定的优势,更具有实用性。
技术实现思路
1、发明目的:本发明的目的是提供一种可在狭小空间使用且具有一定扩展性、基于stm32的自平衡桌面机器人系统。
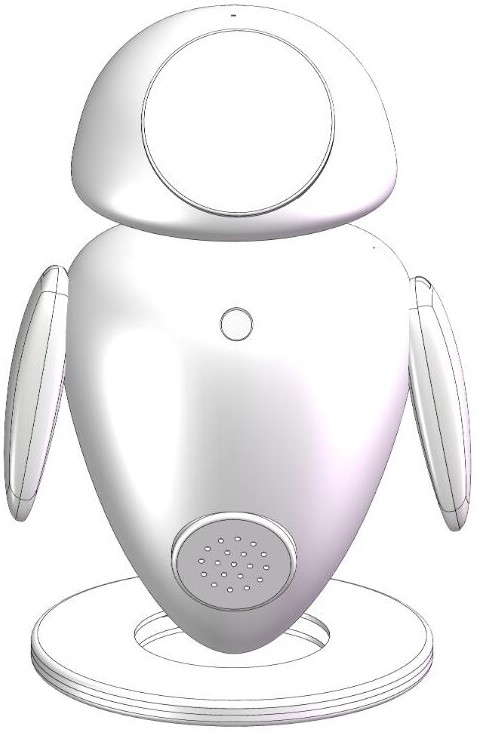
2、技术方案:本发明包括头部、身体和底部,所述头部由前到后依次为主控板和传感器板,环境光传感器设置于主控板和传感器板顶部,身体包括多个舵机分别控制头部、两处手臂的自由度,动量轮、平衡板、人体接近传感器和电池板,主控板驱动屏幕,控制舵机转动,通过wifi模块将姿态信号、语音信号无线传输给上位机,环境光传感器判断环境光线的强度,所述人体接近传感器设置于身体上部靠近传感器板,所述底部和身体内部各包括一组线圈,底部沿y轴方向具有一定厚度,沿x轴方向为弧度。
3、进一步地,所述主控板包括mcu stm32f405rgt6并采用了arm cortex-m4内核,音频编解码芯片wm8978和咪头。
4、进一步地,所述传感器板驱动人体接近传感器、环境光传感器以及惯性测量单元,还包括有音频功放芯片、音频编解码芯片以及与身体外部连接的喇叭。
5、进一步地,所述环境光传感器基于temt6000模拟人对环境光线的强度的判断,控制屏幕背光。
6、进一步地,所述人体接近传感器采用雷达模块ld016探测物体。
7、进一步地,所述平衡板包括esp32主控模块、加速度计和陀螺仪传感器模块,用于测量系统的状态参数,并将参数送回到esp32中进行计算和处理。
8、进一步地,所述舵机设置有位置反馈,通过wifi模块esp8266建立与上位机的无线通讯。
9、进一步地,所述动量轮垂直y轴方向使用。
10、进一步地,所述惯性测量单元采用mpu6050测量单元。
11、进一步地,所述电池板和平衡板中间夹有动量轮。
12、有益效果:本发明与现有技术相比,具有如下显著优点:具有稳定性与安全性;成本较低,自制机器人系统相较于其他机器人成本非常低;无线充电,无需绑定大电池或将机器人和电源进行有线连接;功能扩展性极强,wifi模块esp8266提供无线通信功能,舵机支持位置回传,具有极强的的可拓展性,通过wifi将上位机数据无线传输,并可以通过屏幕、喇叭、手臂等载体实现多种功能。
技术特征:
1.一种基于stm32的自平衡桌面机器人系统,其特征在于:包括头部、身体和底部,所述头部由前到后依次为主控板(1)和传感器板(2),环境光传感器(3)设置于主控板(1)和传感器板(2)顶部,身体包括多个舵机(10)分别控制头部、两处手臂的自由度,动量轮(6)、平衡板(7)、人体接近传感器(4)和电池板(8),主控板(1)驱动屏幕,控制舵机(10)转动,通过wifi模块将姿态信号、语音信号无线传输给上位机,环境光传感器(3)判断环境光线的强度,所述人体接近传感器(4)设置于身体上部靠近传感器板(2),所述底部和身体内部各包括一组线圈(11),底部沿y轴方向具有一定厚度,沿x轴方向为弧度。
2.根据权利要求1所述的基于stm32的自平衡桌面机器人系统,其特征在于:所述主控板(1)包括mcu stm32f405rgt6并采用了arm cortex-m4内核,音频编解码芯片wm8978和咪头(5)。
3.根据权利要求1所述的基于stm32的自平衡桌面机器人系统,其特征在于:所述传感器板(2)驱动人体接近传感器(4)、环境光传感器(3)以及惯性测量单元,还包括有音频功放芯片、音频编解码芯片以及与身体外部连接的喇叭(9)。
4.根据权利要求1所述的基于stm32的自平衡桌面机器人系统,其特征在于:所述环境光传感器(3)基于temt6000模拟人对环境光线的强度的判断,控制屏幕背光。
5.根据权利要求1所述的基于stm32的自平衡桌面机器人系统,其特征在于:所述人体接近传感器(4)采用雷达模块ld016探测物体。
6.根据权利要求1所述的基于stm32的自平衡桌面机器人系统,其特征在于:所述平衡板(7)包括esp32主控模块、加速度计和陀螺仪传感器模块,用于测量系统的状态参数,并将参数送回到esp32中进行计算和处理。
7.根据权利要求1所述的基于stm32的自平衡桌面机器人系统,其特征在于:所述舵机(10)设置有位置反馈,通过wifi模块esp8266建立与上位机的无线通讯。
8.根据权利要求1所述的基于stm32的自平衡桌面机器人系统,其特征在于:所述动量轮(6)垂直y轴方向使用。
9.根据权利要求1所述的基于stm32的自平衡桌面机器人系统,其特征在于:所述惯性测量单元采用mpu6050测量单元。
10.根据权利要求1所述的基于stm32的自平衡桌面机器人系统,其特征在于:所述电池板(8)和平衡板(7)中间夹有动量轮(6)。
技术总结
本发明公开了一种基于STM32的自平衡桌面机器人系统,包括头部、身体和底部,所述头部由前到后依次为主控板和传感器板,环境光传感器设置于主控板和传感器板顶部,身体包括多个舵机分别控制头部、两处手臂的自由度,动量轮、平衡板、人体接近传感器和电池板,主控板驱动屏幕,控制舵机转动,通过WIFI模块将姿态信号、语音信号无线传输给上位机,环境光传感器判断环境光线的强度,所述底部和身体内部各包括一组线圈,底部沿y轴方向具有一定厚度,沿x轴方向为弧度。本发明安全稳定,成本较低,无需绑定大电池或将机器人和电源进行有线连接;WIFI模块ESP8266提供无线通信功能,舵机支持位置回传,具有极强的的可拓展性。
技术研发人员:吕灿,郭颖
受保护的技术使用者:南京信息工程大学
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!