一种电力系统的轨道式智能巡检机器人的制作方法
本发明涉及轨道巡检机器人,特别是涉及一种电力系统的轨道式智能巡检机器人。
背景技术:
1、目前,轨道巡检机器人通常应用于配电站房、机房、工厂等室内设备场所。轨道巡检机器人通过搭载高清摄像机及红外热成像仪,实现综合管廊实时监控与红外热成像智能诊断,并根据检测结果对被测设备状态进行诊断、预警和报警,从而替代作业人员完成多种巡视、检测和监测等工作,使工作人员可以实时掌控管廊内部的环境信息,进而改善人工巡检工作量较大、危险性较高的问题。在配电站房中,现有的轨道巡检机器人一般包括机器人本体、导轨、旋转模块、升降模块和摄像模块,但是这类型的轨道巡检机器人在配电站房或电力系统的电设备出现异常时,易出现盲角,需要旋转调节摄像模块转向出现异常的位置才可以对异常情况进行摄像监控,摄像模块在三维空间上的角度、方向和位置的调节过渡时间过长,达不到对异常情况快速预警的效果,影响工作人员对配电站房等环境快速排查和抢修。
技术实现思路
1、本发明的目的是克服了现有技术的问题,提供了一种电力系统的轨道式智能巡检机器人。
2、为了达到上述目的,本发明采用以下方案:
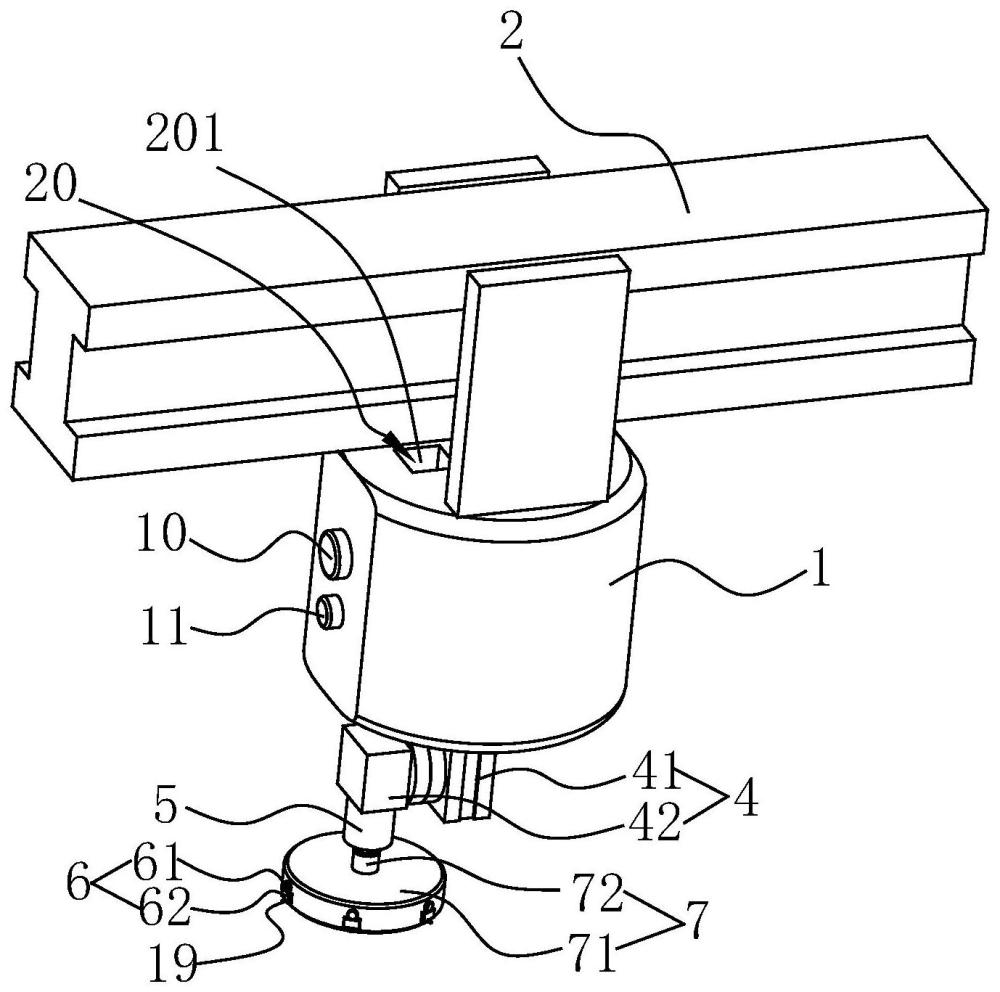
3、一种电力系统的轨道式智能巡检机器人,包括机器人本体和导轨,所述机器人本体相适配挂装在所述导轨上并沿所述导轨运动;所述电力系统的轨道式智能巡检机器人还包括:
4、360°旋转单元,其设于所述机器人本体的下端上;
5、角度摆动机构,其与所述360°旋转单元连接;
6、多节伸缩单元,其与所述角度摆动机构连接且通过所述角度摆动机构驱动可相对所述机器人本的上下方向摆动;
7、巡检摄像单元,若干个所述巡检摄像单元连接在所述多节伸缩单元的下端上且绕所述多节伸缩单元周向均匀布设。
8、进一步地,所述角度摆动机构包括旋转气缸和摆动基座;所述旋转气缸与所述360°旋转单元连接;所述摆动基座连接在所述旋转气缸上;所述摆动基座与所述多节伸缩单元连接。
9、进一步地,若干个所述巡检摄像单元与所述多节伸缩单元的下端之间通过安装支架连接;所述安装支架包括安装转盘体和连接在所述多节伸缩单元的下端与所述安装转盘体之间的连接轴;若干个所述巡检摄像单元绕所述多节伸缩单元周向均匀布设。
10、进一步地,所述巡检摄像单元的数量具有6个;相邻的两个所述巡检摄像单元所成的夹角为60°。
11、进一步地,所述巡检摄像单元包括并排连接的红外摄像模块和可见光摄像模块。
12、进一步地,所述电力系统的轨道式智能巡检机器人还包括巡检控制单元、无线通信模块、温湿度传感器、气体检测单元、声光检测单元、明火探测单元、烟雾报警单元、自动导航模块、双向通话单元、报警单元和指示灯;所述巡检控制单元分别与360°旋转单元、角度摆动机构、多节伸缩单元、巡检摄像单元、温湿度传感器、气体检测单元、声光检测单元、明火探测单元、烟雾报警单元、自动导航模块、双向通话单元、报警单元和指示灯电连接;
13、所述巡检控制单元与所述无线通信模块通信连接;巡检控制单元、无线通信模块、温湿度传感器、气体检测单元、声光检测单元、明火探测单元、烟雾报警单元、自动导航模块、双向通话单元、报警单元和指示灯均设在所述机器人本体上。
14、进一步地,还包括与所述巡检控制单元电连接的红外测温单元;所述红外测温单元安装在所述安装支架上。
15、进一步地,所述无线通信模块为蓝牙模块、wifi模块、4g/5g模块和gprs模块中的一种或多种。
16、进一步地,所述机器人本体内设有散热通道;所述散热通道包括第一散热道和第二散热道;所述第一散热道安装在所述机器人本体的上端;两条第二散热道分别于所述第一散热道相连通且沿所述机器人本体的下端方向朝下开设;两条所述第二散热道的下端开口位于所述360°旋转单元的两侧;所述第一散热道的上端开口处设有排气扇;所述第二散热道的下端开口处设有导流板。
17、进一步地,所述机器人本体的表面上涂覆防腐蚀涂层;所述导轨采用铝合金型材制成;所述导轨的表面具有阳极氧化处理层。
18、与现有的技术相比,本发明具有如下优点:
19、本发明在机器人本体和导轨的基础上,增设了360°旋转单元、角度摆动机构、多节伸缩单元和巡检摄像单元,在360°旋转单元、角度摆动机构、多节伸缩单元的作用下,快速调节巡检摄像单元在三维空间上的任意角度、方向和位置,再结合多个巡检摄像单元同时在周向无死角摄像监控,精确定位,更为接近异常地方,高效且清晰精确地巡检摄像监测,节省巡检摄像单元在三维空间上的角度、方向和位置的调节过渡时间,对异常情况快速预警,以便于工作人员对配电站房等环境快速排查和抢修,节省人力、物力和时间,有效地提高巡检效率、降低人员风险以及改善电力系统的可靠性和安全性。
技术特征:
1.一种电力系统的轨道式智能巡检机器人,包括机器人本体和导轨,所述机器人本体相适配挂装在所述导轨上并沿所述导轨运动;其特征在于;所述电力系统的轨道式智能巡检机器人还包括:
2.根据权利要求1所述的电力系统的轨道式智能巡检机器人,其特征在于,所述角度摆动机构包括旋转气缸和摆动基座;所述旋转气缸与所述360°旋转单元连接;所述摆动基座连接在所述旋转气缸上;所述摆动基座与所述多节伸缩单元连接。
3.根据权利要求1或2所述的电力系统的轨道式智能巡检机器人,其特征在于,若干个所述巡检摄像单元与所述多节伸缩单元的下端之间通过安装支架连接;所述安装支架包括安装转盘体和连接在所述多节伸缩单元的下端与所述安装转盘体之间的连接轴;若干个所述巡检摄像单元绕所述多节伸缩单元周向均匀布设。
4.根据权利要求1或2所述的电力系统的轨道式智能巡检机器人,其特征在于,所述巡检摄像单元的数量具有6个;相邻的两个所述巡检摄像单元所成的夹角为60°。
5.根据权利要求3所述的电力系统的轨道式智能巡检机器人,其特征在于,所述巡检摄像单元包括并排连接的红外摄像模块和可见光摄像模块。
6.根据权利要求3所述的电力系统的轨道式智能巡检机器人,其特征在于,所述电力系统的轨道式智能巡检机器人还包括巡检控制单元、无线通信模块、温湿度传感器、气体检测单元、声光检测单元、明火探测单元、烟雾报警单元、自动导航模块、双向通话单元、报警单元和指示灯;所述巡检控制单元分别与360°旋转单元、角度摆动机构、多节伸缩单元、巡检摄像单元、温湿度传感器、气体检测单元、声光检测单元、明火探测单元、烟雾报警单元、自动导航模块、双向通话单元、报警单元和指示灯电连接;
7.根据权利要求6所述的电力系统的轨道式智能巡检机器人,其特征在于,还包括与所述巡检控制单元电连接的红外测温单元;所述红外测温单元安装在所述安装支架上。
8.根据权利要求6所述的电力系统的轨道式智能巡检机器人,其特征在于,所述无线通信模块为蓝牙模块、wifi模块、4g/5g模块和gprs模块中的一种或多种。
9.根据权利要求6所述的电力系统的轨道式智能巡检机器人,其特征在于,所述机器人本体内设有散热通道;所述散热通道包括第一散热道和第二散热道;所述第一散热道安装在所述机器人本体的上端;两条第二散热道分别于所述第一散热道相连通且沿所述机器人本体的下端方向朝下开设;两条所述第二散热道的下端开口位于所述360°旋转单元的两侧。
10.根据权利要求9所述的电力系统的轨道式智能巡检机器人,其特征在于,所述第一散热道的上端开口处设有排气扇;所述第二散热道的下端开口处设有导流板。
技术总结
本发明涉及轨道巡检机器人技术领域,公开了一种电力系统的轨道式智能巡检机器人,包括机器人本体、导轨、360°旋转单元、角度摆动机构、多节伸缩单元和巡检摄像单元。若干个巡检摄像单元连接在多节伸缩单元的下端上且绕多节伸缩单元周向均匀布设。本发明提供的电力系统的轨道式智能巡检机器人可以快速调节巡检摄像单元在三维空间上的任意角度、方向和位置,再结合多个巡检摄像单元同时在周向无死角摄像监控,精确定位,更为接近异常地方,高效且清晰精确地巡检摄像监测,节省巡检摄像单元在三维空间上的角度、方向和位置的调节过渡时间,对异常情况快速预警,有效地提高巡检效率、降低人员风险以及改善电力系统的可靠性和安全性。
技术研发人员:黄程章
受保护的技术使用者:广东景呈电力设备有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!