一种轨道式消防巡检机器人的制作方法
本发明涉及巡检机器人,具体涉及一种轨道式消防巡检机器人。
背景技术:
1、随着城市基础设施建设的快速发展,国内许多城市相继采用地下综合管廊来缓解地面架设与建筑空间之间的矛盾,城市综合管廊即在地下设置一个将燃气,供热,通讯,电力、给排水等各种工程管线于一体的综合空间,并设有专用检修口、吊装口以及监控系统。由于综合管廊电缆数量多、敷设密集动力电缆在运行状态下处于发热状态,考虑管廊结构特点,当一条电缆发生故障后,会造成周围其他电缆产生火灾事故,基础设施稳定安全的运行将直接影响城市发展,所以对管廊的巡检至关重要,而管廊内空间复杂、设施设备众多,传统的人工巡检方式存在漏巡、漏发现的可能性,对巡视人员的人身安全也有一定的威胁。
2、专利公开号为:cn105397795a的专利文件公开了一种轨道式巡检机器人,包括机器人本体、主控单元、能源模块、检测组件以及无线通讯模块。机器人能实时检测轨道附近的设备及环境,并将信息传输到远程操控中心,工作人员能实时地了解检测到的信息,并可向机器人发送控制指令。本发明的机器人检测结果稳定,无需人员到现场检测,节省了人工;机器人能在发生火灾、危险气体泄漏时快速到达现场,获得现场数据和信息。
3、由于综合管廊位于地下,地下环境比较潮湿,通风相对较差,而现有的巡检机器人一般都为沿着固定的轨道运动,且巡检机器人会携带多个功能模块,例如摄像头和灭火模块,这就导致现有的巡检机器人的长度和体积都会增加,为了便于巡检机器人沿着轨道运动时能够轻松转向,目前的巡检机器人一般都由多个机器人本体组成,相邻的机器人本体之间采用活动连接,从而缩短巡检机器人的转向半径,多个功能模块分散至不同的机器人本体上,而连接不同机器人本体的线缆往往直接暴露在机器人本体的外部,线缆的接头处长时间处在潮湿环境下易发生短路事故或其他故障,影响机器人在极端环境下的正常使用,上述技术方案并没有针对这个问题进行解决,有待改进。
技术实现思路
1、为了克服上述的技术问题,本发明的目的在于提供一种轨道式消防巡检机器人,其解决了当前的巡检机器人未在多个分体之间设置防潮的连接组件,进而影响巡检机器人长久使用的问题。
2、本发明的目的可以通过以下技术方案实现:
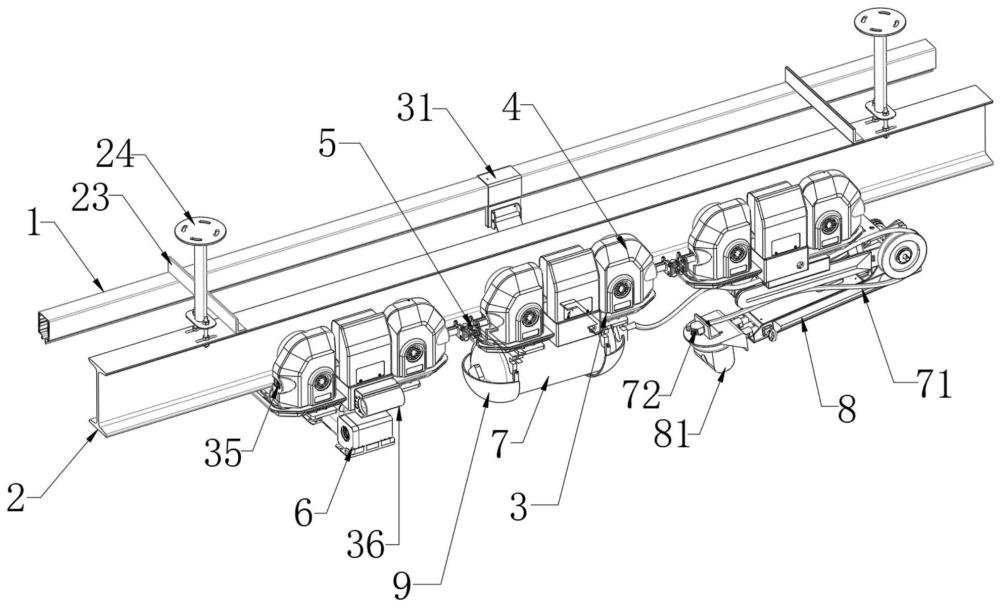
3、一种轨道式消防巡检机器人,至少包括三个沿滑轨运动的机器人本体,三个所述机器人本体上分别安装有用于观察外部环境的双目云台,用于储存灭火介质的灭火罐以及可多自由度移动的机械臂,所述机械臂上安装有喷头和光电摄像头,所述光电摄像头用于精准定位火源并引导机械臂的运动轨迹,所述喷头通过连通管与所述灭火罐连通后将灭火介质喷淋至火源处实现灭火;
4、机器人本体包括底座以及设置于所述底座上方的驱动组件,所述驱动组件与所述滑轨相互配合带动机器人本体向前或向后运动,相邻的机器人本体之间通过密封连接组件活动连接,而从相邻机器人本体内穿出的线缆穿设于所述密封连接组件内部进行接头,密封连接组件用于实现相邻机器人本体之间的同步运动并对外露的线缆进行密封防护。
5、进一步在于,所述密封连接组件包括分别设置于相邻两个所述机器人本体上的连接管,两个所述连接管的相对面均设置有对接板,在两个所述对接板之间镜像对称设置有两个波纹橡胶套和两个弹性组件,两个所述波纹橡胶套之间以及两个所述弹性组件之间均为可拆卸连接;
6、连接管呈两端开口的中空筒状结构,波纹橡胶套位于连接管的开口处,线缆放置于连接管内部,线缆的接头处被两个波纹橡胶套封闭于二者所组成的密闭腔体内部。
7、进一步在于,所述波纹橡胶套呈两端开口的锥筒结构,波纹橡胶套直径较小的一端与所述对接板固连,波纹橡胶套直径较大的一端设置有磁吸组件,镜像对称设置的两个波纹橡胶套之间通过磁吸组件密闭对接在一起。
8、进一步在于,所述弹性组件包括相对靠近所述对接板的连接板一和相对远离对接板的连接板二,所述连接板一和所述连接板二之间通过至少一根压力弹簧弹性连接,镜像对称设置的两个连接板二之间通过限位壳和转动件可拆卸连接在一起。
9、进一步在于,所述连接管表面开设有一处与其内部连通的安装口,所述安装口的内壁沿连接管的轴向开设有活动槽;
10、安装口内可拆卸连接有封板,所述封板的尺寸与安装口相匹配,封板的表面设置有与所述活动槽活动连接的固定杆;
11、封板的底面以及朝向所述波纹橡胶套一端的端面分别设置有磁吸块一和磁吸块二,波纹橡胶套直径较窄的一端的端面设置有磁吸块三;
12、当封板未密封安装口时,封板能够通过所述磁吸块一和所述磁吸块三的磁吸固定使封板与连接管之间处于垂直状态,当封板密封安装口时,封板能够通过所述磁吸块二和磁吸块三的磁吸固定使封板与波纹橡胶套之间密闭对接。
13、进一步在于,还包括平行设置于所述滑轨邻近处的滑触线轨道,所述滑触线轨道内安装有导电线,至少一个所述机器人本体通过接触器与所述导电线电性连接,当机器人本体沿着滑轨运动时,所述接触器同步运动,为机器人本体内的电源模块提供持续的电力供给。
14、进一步在于,所述底座上安装有定位模块、控制模块、距离传感器以及甲烷激光传感器;
15、所述定位模块用于实时定位机器人本体的精确位置;
16、所述控制模块用于与远程控制中心进行数据交互并控制该轨道机器人执行相应的巡检和灭火指令;
17、所述距离传感器用于对该轨道机器人行进路线上的障碍进行检测;
18、所述甲烷激光传感器用于检测综合管廊内的甲烷浓度。
19、进一步在于,所述滑轨为工字形槽钢,滑轨包括上、下两部分水平设置的翼缘以及连接两个所述翼缘的腹板;
20、所述驱动组件包括相对设置的两个侧板,两个所述侧板之间设置有连接件和轴承座,所述轴承座的两端分别与两个侧板转动连接,所述连接件用于将两个侧板连接为整体,该整体结构通过位于轴承座中间位置的转动轴承与所述底座转动连接;
21、在两个侧板之间形成有供所述腹板和下部翼缘穿过的空隙,侧板与腹板之间转动设置有胶轮,所述胶轮通过与其同轴安装的电机输入扭矩,胶轮的转动方向与滑轨的长度延伸方向一致,两个侧板之间对应下部翼缘的下方位置转动设置有导向轮,胶轮和所述导向轮均能与滑轨的表面紧密接触;
22、驱动组件上还安装有用于检测胶轮胎厚的胎厚检测组件。
23、进一步在于,所述胶轮和所述导向轮之间倾斜设置,所述电机通过安装座一安装至所述侧板的表面,导向轮的端部通过安装座二安装至侧板的表面,侧板对应所述安装座一和所述安装座二之间开设有滑槽,所述滑槽内设置有用于弹性连接安装座一和安装座二的拉伸弹簧,安装座一和安装座二能够关于滑槽往复移动;
24、胎厚检测组件包括压力传感器和检测拨杆,侧板的表面通过扭转弹簧转动连接有所述检测拨杆的一端,所述检测拨杆的另一端穿过侧板并通过万向滚珠与胶轮的表面接触,所述扭转弹簧持续驱动检测拨杆朝向胶轮转动,侧板对应检测拨杆穿过的位置贯穿开设有弧形槽,检测拨杆能够在所述弧形槽内往复移动;
25、所述压力传感器连接有两个压力接收件,其中,压力接收件一位于弧形槽靠近胶轮的一端,压力接收件二延伸至安装座一和安装座二之间,当胶轮的胎厚减少,所述压力接收件一和所述压力接收件二均受到挤压,此时压力传感器报警,需更换胶轮。
26、进一步在于,所述灭火罐通过安装组件与所述机器人本体可拆卸连接,所述安装组件包括设置于机器人本体底部的安装板,所述安装板的两端均向下延伸有开口套环,所述开口套环的两端通过轴销转动连接有安装套;
27、所述安装套内壁铺设有弹性材料,灭火罐的两端分别放置在两个安装套内,其中,至少有一个安装套转动连接有限位杆,所述限位杆的端部开设有卡槽,另一个安装套上设置有卡块,转动限位杆并使所述卡槽与所述卡块卡接固定,通过约束两个安装套之间的间距对位于二者之间的灭火罐进行限位固定。
28、本发明的有益效果:
29、1、相较于传统方法,本技术方案不仅能够实现对综合管廊的巡检以及火势感知功能,而且通过与远程控制中心进行交互,还可以控制可多自由度移动的机械臂引导喷头位置,配合灭火罐对火源的中心点进行有效灭火,机械手端部设有光电摄像头,可实现无死角的火源探测,精准定位异常位置,进行及时灭火和降温操作,实际应用效果更好;
30、2、本技术方案中的密封连接组件在实现多个机器人本体同步运动的前提下,还能对相邻机器人本体之间线缆的接头进行密封防护,当机器人本体高速运动时,密封连接组件中的波纹橡胶套和压力弹簧处于张紧状态,波纹橡胶套以及压力弹簧的长度基于自身结构特性实现一定的延长,而当机器人本体低速运动或静止时,波纹橡胶套和压力弹簧处于松弛状态,二者的长度复原,且波纹橡胶套和压力弹簧不需要人工参与,能够自适应地配合机器人本体运动速度进行变化,在此过程中,波纹橡胶套始终将线缆接头包覆在内部,有效避免外部环境中的液体或湿润气体接触到线缆接头,保证该轨道机器人在地下综合管廊环境中的长期稳定运行。
- 还没有人留言评论。精彩留言会获得点赞!