基于晶圆传送的多机械臂碰撞预警方法及系统与流程
本发明涉及半导体领域,更具体地说,本发明涉及基于晶圆传送的多机械臂碰撞预警方法及系统。
背景技术:
1、半导体行业是现代科技领域的重要支柱之一,半导体晶圆的制造是制造半导体芯片的关键步骤之一;在晶圆生产制造过程中,晶圆通常需要在各种设备之间传送,包括清洁设备、刻蚀设备、沉积设备等;然而,由于晶圆尺寸大小的不一致性以及机械臂运动因素(如移动路径和速度等)的时刻变化,晶圆在传送过程中难免会受到碰撞,一旦发生碰撞,可能会导致晶圆的损坏,或导致机械臂出现故障,这不仅影响生产效率,还会增加制造成本,严重还可能影响到半导体器件的性能和可靠性;因此,防碰撞成为半导体制造中的一项重要任务。
2、当前,传统的防碰撞方法通常依赖于设备操作员的经验和视觉监控,但这种方法容易受到人为因素和监控盲点的影响,无法提供及时和精确的预警;尽管存在一些智能化防碰撞的文献,例如授权公告号为cn111687829b的中国专利公开了一种基于深度视觉的防碰撞控制方法、装置、介质及终端,但对上述方法以及现有技术进行研究和实际应用发现,上述方法以及现有技术至少存在以下部分缺陷:
3、(1)难以应用于双臂机械手,无法预测每个机械臂上被传送晶圆的停留时间和停留坐标,进而无法为后续的晶圆碰撞判断提供条件和数据支撑;
4、(2)无法提供预测性和精确化的碰撞预警,进一步地,无法依据碰撞预警结果进行自动化控制,进而难以规避晶圆在传送中碰撞风险,难以保障半导体器件的性能和可靠性。
技术实现思路
1、为了克服现有技术的上述缺陷,本发明提供基于晶圆传送的多机械臂碰撞预警方法及系统。
2、为实现上述目的,本发明提供如下技术方案:
3、基于晶圆传送的多机械臂碰撞预警方法,所述方法应用于传送晶圆的双臂机械手,所述双臂机械手包括用于传送第一晶圆的机械臂a和用于传送第二晶圆的机械臂b,所述方法包括:
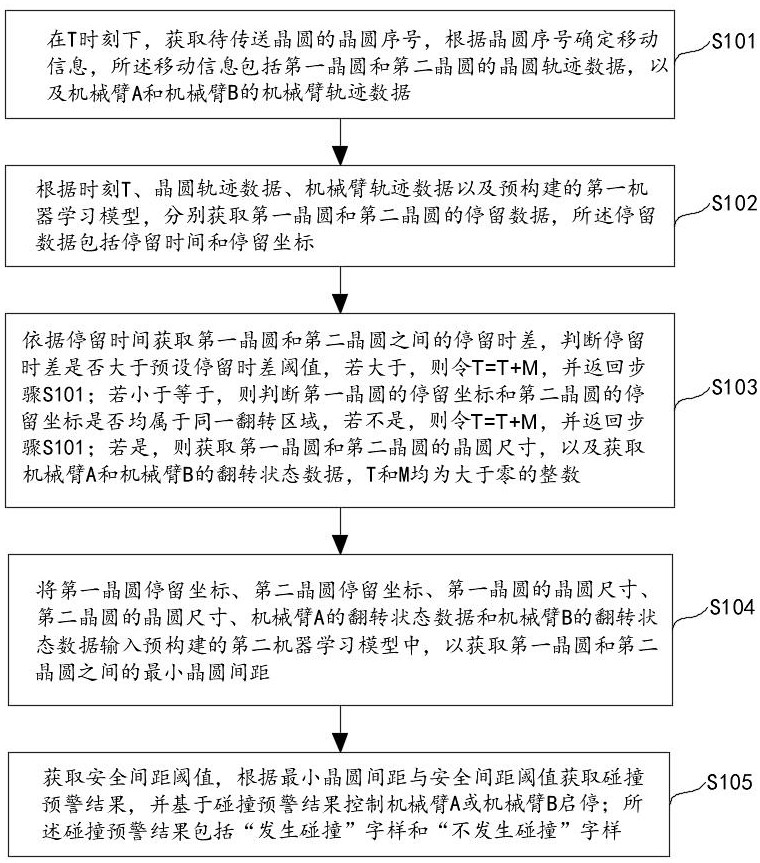
4、s101:在t时刻下,获取待传送晶圆的晶圆序号,根据晶圆序号确定移动信息,所述移动信息包括第一晶圆和第二晶圆的晶圆轨迹数据,以及机械臂a和机械臂b的机械臂轨迹数据;
5、s102:根据时刻t、晶圆轨迹数据、机械臂轨迹数据以及预构建的第一机器学习模型,分别获取第一晶圆和第二晶圆的停留数据,所述停留数据包括停留时间和停留坐标;
6、s103:依据停留时间获取第一晶圆和第二晶圆之间的停留时差,判断停留时差是否大于预设停留时差阈值,若大于,则令t=t+m,并返回步骤s101;若小于等于,则判断第一晶圆的停留坐标和第二晶圆的停留坐标是否均属于同一翻转区域,若不是,则令t=t+m,并返回步骤s101;若是,则获取第一晶圆和第二晶圆的晶圆尺寸,以及获取机械臂a和机械臂b的翻转状态数据,t和m均为大于零的整数;
7、s104:将第一晶圆停留坐标、第二晶圆停留坐标、第一晶圆的晶圆尺寸、第二晶圆的晶圆尺寸、机械臂a的翻转状态数据和机械臂b的翻转状态数据输入预构建的第二机器学习模型中,以获取第一晶圆和第二晶圆之间的最小晶圆间距;
8、s105:获取安全间距阈值,根据最小晶圆间距与安全间距阈值获取碰撞预警结果,并基于碰撞预警结果控制机械臂a或机械臂b启停;所述碰撞预警结果包括“发生碰撞”字样和“不发生碰撞”字样。
9、进一步地,所述晶圆轨迹数据包括晶圆移动起始位置和晶圆移动目标位置;所述机械臂轨迹数据包括移动方向和移动速度。
10、进一步地,根据晶圆序号确定移动信息,包括:
11、获取m条晶圆序号与移动信息的预设关系;所述移动信息中包括第一晶圆和第二晶圆的晶圆轨迹数据,以及机械臂a和机械臂b的机械臂轨迹数据;
12、依据晶圆序号,选出对应晶圆序号与移动信息的预设关系,根据对应晶圆序号与移动信息的预设关系,得到移动信息。
13、进一步地,所述第一晶圆的停留数据的获取逻辑如下:
14、提取t时刻下、第一晶圆的晶圆轨迹数据以及机械臂a的移动轨迹数据;
15、将时刻t、第一晶圆的晶圆轨迹数据以及机械臂a的移动轨迹数据输入预构建的第一机器学习模型中,得到第一晶圆的停留时间和停留坐标;
16、所述第二晶圆的停留数据的获取逻辑如下:
17、提取t时刻下、第二晶圆的晶圆轨迹数据以及机械臂b的移动轨迹数据;
18、将时刻t、第二晶圆的晶圆轨迹数据以及机械臂b的移动轨迹数据输入预构建的第一机器学习模型中,得到第二晶圆的停留时间和停留坐标。
19、进一步地,所述预构建的第一机器学习模型的生成逻辑如下:
20、获取晶圆停留历史数据,将晶圆停留历史数据划分为晶圆停留训练集和晶圆停留测试集;其中,所述晶圆停留特征数据及其对应的停留数据;所述晶圆停留特征数据包括时刻t、第一晶圆和/或第二晶圆的晶圆轨迹数据以及机械臂a和/或机械臂b的机械臂轨迹数据;
21、构建第一回归网络,将晶圆停留训练集中的晶圆停留特征数据作为第一回归网络的输入数据,将晶圆停留训练集中的停留数据作为第一回归网络的输出数据,对第一回归网络进行训练,得到初始第一回归网络;
22、利用晶圆停留测试集对初始第一回归网络进行模型验证,输出小于等于预设测试误差的初始第一回归网络作为预构建的第一机器学习模型。
23、进一步地,依据停留时间获取第一晶圆和第二晶圆之间的停留时差,包括:
24、将第一晶圆的停留时间标记为第一停留时间,以及将第二晶圆的停留时间标记为第二停留时间;
25、计算第一停留时间和第二停留时间之间的绝对差值,将第一停留时间和第二停留时间之间的绝对差值作为第一晶圆和第二晶圆之间的停留时差。
26、进一步地,判断第一晶圆的停留坐标和第二晶圆的停留坐标是否均属于同一翻转区域,包括:
27、获取k个翻转区域的坐标集合和区域序号,并将第一晶圆的停留坐标标记为第一停留坐标,以及将第二晶圆的停留坐标标记为第二停留坐标;
28、将每个翻转区域的坐标集合与第一停留坐标进行归属比较,以获取第一停留坐标所归属的翻转区域的区域序号;
29、将每个翻转区域的坐标集合与第二停留坐标进行归属比较,以获取第二停留坐标所归属的翻转区域的区域序号;
30、将第一停留坐标所归属的翻转区域的区域序号,与第二停留坐标所归属的翻转区域的区域序号进行比对,若区域序号相同,则判定第一晶圆的停留坐标和第二晶圆的停留坐标属于同一翻转区域;若区域序号不相同,则判定第一晶圆的停留坐标和第二晶圆的停留坐标不属于同一翻转区域。
31、进一步地,所述翻转状态数据包括翻转速度和机械臂高度;
32、所述预构建的第二机器学习模型的生成逻辑如下:
33、获取晶圆间距历史数据,将晶圆间距历史数据划分为晶圆间距训练集和晶圆间距测试集;其中,所述晶圆间距历史数据包括晶圆间距特征数据及其对应第一晶圆和第二晶圆之间的最小晶圆间距;所述晶圆间距特征数据包括第一晶圆停留坐标、第二晶圆停留坐标、第一晶圆的晶圆尺寸、第二晶圆的晶圆尺寸、机械臂a的翻转状态数据和机械臂b的翻转状态数据;
34、构建第二回归网络,将晶圆间距训练集中的晶圆间距特征数据作为第二回归网络的输入数据,将晶圆间距训练集中第一晶圆和第二晶圆之间的最小晶圆间距作为第二回归网络的输出数据,对第二回归网络进行训练,得到初始第二回归网络;
35、利用晶圆间距测试集对初始第二回归网络进行模型验证,输出小于等于预设测试误差的初始第二回归网络作为预构建的第二机器学习模型。
36、进一步地,根据最小晶圆间距与安全间距阈值获取碰撞预警结果,包括:
37、将最小晶圆间距与安全间距阈值进行比较;
38、若最小晶圆间距小于等于安全间距阈值,则生成“发生碰撞”字样,并将“发生碰撞”字样作为碰撞预警结果;
39、若最小晶圆间距大于安全间距阈值,则生成“不发生碰撞”字样,并将“不发生碰撞”字样作为碰撞预警结果。
40、基于晶圆传送的多机械臂碰撞预警系统,其用于实现上述任一所述基于晶圆传送的多机械臂碰撞预警方法,包括:
41、信息确定模块,用于在t时刻下,获取待传送晶圆的晶圆序号,根据晶圆序号确定移动信息,所述移动信息包括第一晶圆和第二晶圆的晶圆轨迹数据,以及机械臂a和机械臂b的机械臂轨迹数据;
42、数据获取模块,用于根据时刻t、晶圆轨迹数据、机械臂轨迹数据以及预构建的第一机器学习模型,分别获取第一晶圆和第二晶圆的停留数据,所述停留数据包括停留时间和停留坐标;
43、判断模块,用于依据停留时间获取第一晶圆和第二晶圆之间的停留时差,判断停留时差是否大于预设停留时差阈值,若大于,则令t=t+m,并触发信息确定模块;若小于等于,则判断第一晶圆的停留坐标和第二晶圆的停留坐标是否均属于同一翻转区域,若不是,则令t=t+m,并触发信息确定模块;若是,则获取第一晶圆和第二晶圆的晶圆尺寸,以及获取机械臂a和机械臂b的翻转状态数据,t和m均为大于零的整数;
44、间距确定模块,用于将第一晶圆停留坐标、第二晶圆停留坐标、第一晶圆的晶圆尺寸、第二晶圆的晶圆尺寸、机械臂a的翻转状态数据和机械臂b的翻转状态数据输入预构建的第二机器学习模型中,以获取第一晶圆和第二晶圆之间的最小晶圆间距;
45、碰撞预警及控制模块,用于获取安全间距阈值,根据最小晶圆间距与安全间距阈值获取碰撞预警结果,并基于碰撞预警结果控制机械臂a或机械臂b启停;所述碰撞预警结果包括“发生碰撞”字样和“不发生碰撞”字样。
46、一种电子设备,包括存储器、处理器以及存储在存储器上并在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述任意一项所述基于晶圆传送的多机械臂碰撞预警方法。
47、一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被执行时实现上述任意一项所述基于晶圆传送的多机械臂碰撞预警方法。
48、相比于现有技术,本发明的有益效果在于:
49、本技术公开了基于晶圆传送的多机械臂碰撞预警方法及系统,包括:根据晶圆序号确定移动信息;根据时刻t、晶圆轨迹数据、机械臂轨迹数据以及预构建的第一机器学习模型,获取停留数据;获取停留时差,判断停留时差是否大于预设停留时差阈值,以及判断停留坐标是否均属于同一翻转区域;将第一晶圆停留坐标、第二晶圆停留坐标、第一晶圆的晶圆尺寸、第二晶圆的晶圆尺寸、机械臂a的翻转状态数据和机械臂b的翻转状态数据输入预构建的第二机器学习模型中,获取最小晶圆间距;根据最小晶圆间距与安全间距阈值获取碰撞预警结果,并基于碰撞预警结果控制机械臂a或机械臂b启停;基于上述过程,本发明适用于双臂机械手的碰撞规避场景,有利于通过预测每个机械臂上被传送晶圆的停留时间和停留坐标,为后续的晶圆碰撞判断提供条件和数据支撑;此外,通过提供预测性和精确化的碰撞预警,本发明能够依据碰撞预警结果进行自动化控制,从而有利于规避晶圆在传送中碰撞风险,进而能够保障半导体器件的性能和可靠性。
- 还没有人留言评论。精彩留言会获得点赞!