一种具有自动排障结构的电力巡检机器人的制作方法
本发明涉及电力巡检,具体为一种具有自动排障结构的电力巡检机器人。
背景技术:
1、电力巡检是指对电力设备和配电系统进行检查、测试和评估的过程,旨在确保电力系统的正常运行和安全性,电力巡检是电力维护和管理的重要环节,通过定期巡视和检测,可以及时发现设备故障、隐患和运行异常,并采取相应的维修和保养措施,确保电力系统的可靠供电。
2、在电力巡检过程中,通常会对电力设备、变电站、输电线路、开关设备等进行检查,观察设备的外观是否完好,检查设备的电气连接、接地等是否符合标准,同时,巡检人员还会使用特殊的仪器和工具,对设备的电压、电流、温度、振动等参数进行测量和记录,这些数据可以用于分析设备的运行状况和性能,预测潜在的故障和问题,传统的电力巡检工作通常依靠人工进行,不仅耗时耗力,而且存在一定的安全风险,而引入电力巡检机器人可以有效提高巡检效率、降低风险,节约人力资源,电力巡检机器人是一种用于电力设备巡检和故障排查的智能机器人,它结合了人工智能、机器视觉和机器人技术,电力巡检机器人可以自主巡检、自动采集数据,并通过智能算法分析故障情况,以辅助巡检人员进行维修和保养工作。
3、电力巡检机器人具有先进的感知和导航能力,它配备了高分辨率的摄像头和传感器,能够识别各种电力设备,如输电线路、变电站和开关设备等,通过机器学习算法,机器人可以分析设备的状态和性能,并及时发现潜在的故障和问题,在对高空的输电线路进行检测时,电力巡检机器人一边在线路上移动,一边检测沿途的设备状态,检测螺丝是否松动,还可以检测线路有无损坏等,对线路进行相应的巡检工作。
4、目前,现有的针对高空线路的电力巡检机器人,主要包括用于驱动机器人在线路上行走的驱动模块,以及用于采集、记录并分析线路情况的检测模块组成,但是,天气寒冷时,线路表面会结冰,不但影响巡检机器人的行走,覆盖在线路表面的冰层,还容易影响巡检机器人对线路情况的检测和判断;因此,不满足现有的需求,对此我们提出了一种具有自动排障结构的电力巡检机器人。
技术实现思路
1、本发明提供了一种具有自动排障结构的电力巡检机器人,具备尽可能清除覆盖在线路表面的冰层,从而尽可能提高巡检机器人对线路情况检测和判断准确性的有益效果,解决了上述背景技术中所提到现有的针对高空线路的电力巡检机器人,主要包括用于驱动机器人在线路上行走的驱动模块,以及用于采集、记录并分析线路情况的检测模块组成,但是,天气寒冷时,线路表面会结冰,不但影响巡检机器人的行走,覆盖在线路表面的冰层,还容易影响巡检机器人对线路情况的检测和判断的问题。
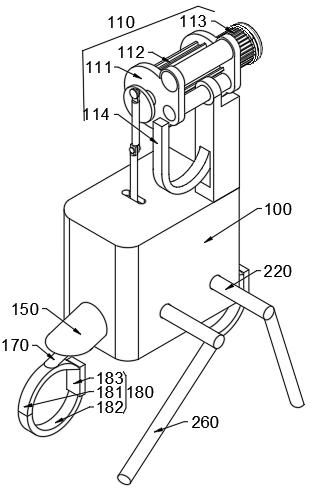
2、本发明提供如下技术方案:一种具有自动排障结构的电力巡检机器人,包括机器人本体和设置在所述机器人本体外侧的驱动机构,所述机器人本体内侧开设有液腔,所述液腔内壁滑动设置有第一活塞,所述第一活塞与所述驱动轮之间设置有用于驱动所述第一活塞的推拉组件,所述机器人本体内侧插接有与所述液腔连通的液缸,所述液腔和所述液缸内均设置有防冻液,所述液缸内侧滑动设置有第二活塞,所述第二活塞端部安装有用于套设电缆的固定环,所述第一活塞侧部安装有直杆,所述直杆端部安装有齿带,所述机器人本体内侧活动设置有与所述齿带啮合的齿轮,所述齿轮侧部插接有轴杆,所述机器人本体内侧开设有第一定位槽和第二定位槽,所述轴杆插接在所述第一定位槽内,所述直杆外侧安装有用于控制所述轴杆位置的控位件,所述轴杆端部连接有与电缆抵触的敲击杆。
3、作为本发明所述的一种具有自动排障结构的电力巡检机器人可选方案,其中:所述驱动机构包括设置在所述机器人本体外侧的安装架、转动设置在所述安装架侧部的驱动轮、用于驱动所述驱动轮的电机、以及用于将所述机器人本体固定在电缆侧部的锁环;
4、所述电机的输出轴与所述驱动轮连接,所述锁环的一端转动安装在所述安装架的外侧,且所述锁环的另一端卡接在所述安装架内侧,电缆贯穿所述锁环,且所述驱动轮抵触在电缆外侧。
5、作为本发明所述的一种具有自动排障结构的电力巡检机器人可选方案,其中:所述液腔设置为圆筒形空腔,所述第一活塞与所述液腔配合使用,所述第一活塞外侧安装有限位滑块,所述限位滑块的数量设置为若干个,且若干个所述限位滑块环向均匀的设置在所述第一活塞外侧,所述机器人本体内侧开设有与所述限位滑块配合使用的限位滑槽,所述限位滑块滑动插设在所述限位滑槽内。
6、作为本发明所述的一种具有自动排障结构的电力巡检机器人可选方案,其中:所述推拉组件包括转动设置在所述安装架侧部的转盘、转动安装在所述转盘外侧的第一连接杆、两端分别与所述第一连接杆和所述第一活塞铆接的第二连接杆、以及套设在所述第二连接杆外侧的弹簧;
7、所述转盘的一侧通过圆杆与所述驱动轮连接,且圆杆转动插接在所述安装架侧部,所述第一连接杆转动安装在所述转盘的边缘位置,所述第二连接杆活动插接在所述机器人本体的侧部,所述弹簧设置在所述机器人本体内侧,且所述弹簧的两端分别与所述第一活塞和所述机器人本体连接。
8、作为本发明所述的一种具有自动排障结构的电力巡检机器人可选方案,其中:所述液缸的数量设置为两个,且两个所述液缸对称的设置在所述机器人本体的侧部,所述液缸内均安装有保持片,所述第二活塞均滑动插接在所述保持片的侧部,所述防冻液填充在所述第一活塞、所述液腔、两个所述液缸、以及两个所述第二活塞之间。
9、作为本发明所述的一种具有自动排障结构的电力巡检机器人可选方案,其中:所述第二活塞的端部设置在所述机器人本体的外侧,且所述第二活塞的端部与所述固定环连接,所述固定环包括与所述第二活塞连接的第一半环、与所述第一半环铰接的第二半环、以及与所述第一半环连接的锁固装置,所述第二半环的端部卡接在所述锁固装置内。
10、作为本发明所述的一种具有自动排障结构的电力巡检机器人可选方案,其中:所述轴杆外侧套设有扭簧,所述扭簧处于被压缩状态,所述扭簧的两端分别与所述齿轮和所述机器人本体连接。
11、作为本发明所述的一种具有自动排障结构的电力巡检机器人可选方案,其中:所述机器人本体内侧设置有弹片,所述弹片的两端均与所述机器人本体内壁连接,且所述弹片设置在所述第一定位槽和所述第二定位槽之间,所述第一定位槽和所述第二定位槽均与所述轴杆配合使用,所述轴杆位于所述第一定位槽时,所述齿轮与所述齿带啮合,所述轴杆位于所述第二定位槽时,所述齿轮与所述齿带分离。
12、作为本发明所述的一种具有自动排障结构的电力巡检机器人可选方案,其中:所述机器人本体内侧滑动设置有安装块,所述轴杆的端部转动插设在所述安装块的侧部。
13、作为本发明所述的一种具有自动排障结构的电力巡检机器人可选方案,其中:所述控位件包括安装在所述直杆外侧的第一调控板和第二调控板,所述第一调控板设置在所述轴杆的上侧,且所述第一调控板端部向上倾斜设置,所述第二调控板设置在所述轴杆的下侧,且所述第二调控板端部也向上倾斜设置。
14、本发明具备以下有益效果:
15、1、该具有自动排障结构的电力巡检机器人,通过驱动机构使得机器人本体在电缆上进行移动,同时驱动机构通过推拉组件带动第一活塞在液腔内滑动,将液腔内的防冻液压入液缸内,使得第二活塞在液缸内上下滑动,从而使得固定环带动其上的电缆持续的抖动;
16、与此同时,第一活塞通过直杆带动齿带下移,通过齿带与齿轮的啮合带动齿轮转动,使得齿轮通过轴杆带动敲击杆抬高远离电缆,且通过控位件使得轴杆从第一定位槽内滑动至第二定位槽内,将齿轮与齿带分离,使得齿轮复位,从而使得抬高的敲击杆敲击在电缆上,将电缆上的冰层击裂击碎,再通过对电缆的抖动,进一步除去电缆上的冰层,尽可能减少冰层对巡检机器人检测和判断线路的影响,最后,直杆带动齿带上移的同时,再次通过控位件将齿轮复位与齿带再次啮合。
17、2、该具有自动排障结构的电力巡检机器人,驱动轮带动转盘转动,使得转盘带动第一连接杆上下移动,且第一连接杆与第二连接杆相对转动,同时通过第二连接杆带动第一活塞上下移动,且第一活塞下移时将弹簧拉伸,弹簧的回弹力进一步辅助第一活塞的上移复位,从而便于第一活塞在液腔内滑动。
18、3、该具有自动排障结构的电力巡检机器人,直杆带动第一调控板下移,使得第一调控板挤压轴杆,且轴杆将弹片挤压平整,使得轴杆滑动插入第二定位槽内,随后弹片回弹复位,将轴杆进一步限制在第二定位槽内,使得齿轮与齿带分离,同理,直杆带动第二调控板上移,使得轴杆被第二调控板重新挤压入第一定位槽内,使得齿轮与齿带再次啮合,从而便于控制齿轮与齿带的啮合或者分离。
- 还没有人留言评论。精彩留言会获得点赞!