基于退步小波神经网络的柔性臂空间机器人抓捕控制方法
本发明涉及空间机械臂捕抓目标控制领域,尤其是一种基于退步小波神经网络的柔性臂空间机器人抓捕控制方法。
背景技术:
1、随着全球气候变暖日趋严重,地球资源的持续减少,人类向深空拓展是必然趋势,各国都在向太空不断发射航天器,在近地太空人类已经发射了数万枚卫星,以及无数的太空垃圾,也使得近地太空拥挤,清理遗弃的卫星及太空垃圾是太空技术发展中绕不开的课题,柔性臂空间机器人在抓捕目标航天器的重要工具,在捕捉前空间机器人与航天器是分离的,捕捉后空间机器人与航天器成为一体(即组合体航天器系统),系统的拓扑结构发生了变化。从而使得系统动力学结构及控制系统均发生了变化;同时,由于捕捉过程必定存在一定程度的接触碰撞,因此捕捉前、后,系统还会存在动量、动量矩及能量的传递变化,空间机器人抓捕目标航天器接触过程的复杂,给航天器控制带来了不确定性。
2、《柔性臂漂浮基空间机器人建模与轨迹跟踪控制》(洪在地,贠超,陈力,《机器人》,2007年第29卷第1期)和《柔性空间机械臂末端运动及柔性振动的模糊自适应补偿控制》(梁捷,陈力,《兵工学报》,2011年第32卷第1期)这两篇文章基于传统奇异摄动理论将柔性臂漂浮基空间机器人系统分解为快、慢子系统分别设计两个控制器的控制算法,解决了柔性臂漂浮基空间机器人轨迹跟踪和柔性臂振动控制问题。但在实际工程应用中,具有算法设计复杂、调节不方便、计算量大占用大量星载计算资源,工程实现难度应较大。
技术实现思路
1、本发明的目的是应用智能神经网络控制理论对系统不确定性进行良好的判断,以逼近实际,针对目标航天器几何及惯性参数均未知的情况,解决捕捉后组合体航天器相应控制律的稳定切换问题。
2、为了实现以上目的,本发明的技术方案为:
3、一种基于退步小波神经网络的柔性臂空间机器人抓捕控制方法,柔性臂空间机器人由空间站载体、刚性机械臂和柔性臂组成,空间站载体与刚性机械臂之间设有第一关节,刚性机械臂与柔性臂之间设有第二关节,其中,机械臂为均匀可变形的柔性臂;为即将抓捕的目标航天器,柔性臂空间机器人与目标航天器构成组合体航天器系统,包括如下步骤:
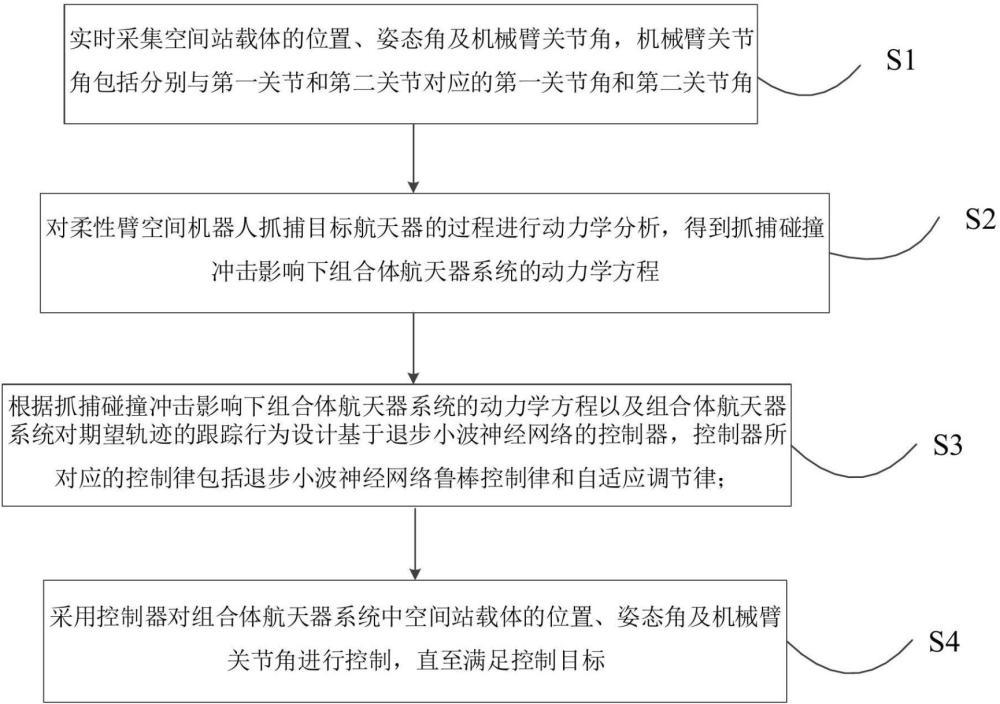
4、s1,实时采集空间站载体的位置、姿态角及机械臂关节角,机械臂关节角包括分别与第一关节和第二关节对应的第一关节角和第二关节角;
5、s2,对柔性臂空间机器人抓捕目标航天器的过程进行动力学分析,得到抓捕碰撞冲击影响下组合体航天器系统的动力学方程;
6、s3,根据抓捕碰撞冲击影响下组合体航天器系统的动力学方程以及组合体航天器系统对期望轨迹的跟踪行为设计基于退步小波神经网络的控制器,控制器所对应的控制律包括退步小波神经网络鲁棒控制律和自适应调节律,退步小波神经网络鲁棒控制律的构造过程如下:
7、基于退步小波神经网络设计退步小波神经网络逼近函数,具体包括:
8、根据神经网络的逼近性质,存在一个理想的权值矩阵、伸缩矢量和平移矢量,定义如下退步小波神经网络逼近函数来逼近柔性臂空间机器人的未知部分,即:
9、
10、式中,为退步小波神经网络的输入变量,为退步小波神经网络逼近函数的误差,表示小波层理想输出矢量;
11、退步小波神经网络逼近函数的估计值可由下式表达:
12、
13、式中,分别为最优权值的估计值,表示小波层估计输出矢量;
14、由和看出,和之间的近似误差可定义为:
15、;
16、定义估计误差,,则可变换为:
17、;根据退步小波神经网络逼近函数构造退步小波神经网络鲁棒控制律,具体包括:
18、设为组合体航天器系统的期望跟踪轨迹,为相应的期望速度和加速度,跟踪误差为;设为组合体航天器系统的轨迹,其与实际跟踪轨迹的误差定义为;对组合体航天器系统的动力学方程进行矩阵分解,得到:
19、式中,、、和为碰撞冲击影响下组合体航天器系统的广义质量矩阵的方块子矩阵,和碰撞冲击影响下组合体航天器系统包含科氏力、离心力的列向量的方块子矩阵,;由第二项求出代入第一项得:
20、 ;
21、其中,,;组合体航天器系统中目标航天器的参数是未知的,为此对作如下处理:
22、;
23、式中,分别表示为组合体航天器系统的已知部分;包含了组合体航天器系统的未知参数;
24、将对时间求导,可得:;
25、式中,,为对时间的一阶导数,为对时间的一阶导数;视为虚拟控制量;根据反演退步设计方法,定义如下变量:;
26、式中,为设计的参数矩阵;
27、将对时间求导,可得:
28、;
29、其中,为对时间的一阶导数,为对时间的二阶导数;
30、退步小波神经网络鲁棒控制律设计为:
31、;
32、式中,为设计的参数矩阵;为鲁棒控制项,用于补偿集中误差;
33、将退步小波神经网络鲁棒控制律代入得到:
34、;
35、并采用如下所示的鲁棒控制项及自适应律:
36、;
37、其中,为对角正定常值矩阵;
38、s4,采用控制器对组合体航天器系统中空间站载体的位置、姿态角及机械臂关节角进行控制,直至满足控制目标。
39、作为优选,步骤s2具体包括:
40、s21,基于空间站载体的位置、姿态角及机械臂关节角的控制力矩建立柔性臂空间机器人动力学模型;
41、s22,基于柔性臂空间机器人动力学模型构建组合体航天器系统的动力学方程,计算得到柔性臂空间机器人与目标航天器接触碰撞后柔性空间机器人的各广义速度及目标航天器的速度,并建立抓捕碰撞冲击影响下组合体航天器系统的动力学方程。
42、作为优选,步骤s21具体包括:
43、建立如下形式的柔性臂空间机器人动力学模型:
44、 ;式中,为广义坐标,表示多维实数,,分别表示空间站载体质心相对惯性坐标系的位置矢量、空间站载体的姿态角、第一关节角、第二关节角,为柔性臂的模态坐标;为对称、正定质量矩阵,为包含科氏力及离心力的列向量;为柔性臂的刚度矩阵,,为柔性臂的抗弯刚度;,其中为由空间站载体的位置、姿态角及机械臂关节角的控制力矩组成的列向量。
45、作为优选,步骤s22具体包括:
46、假设该目标航天器有着初始的移动速度、和转动角速度,建立在轨抓捕期间柔性臂空间机器人与目标航天器的动力学方程,如下式所示:
47、;
48、;
49、式中,为目标航天器的广义质量矩阵,为目标航天器包含科氏力、离心力的列向量,为目标航天器独立的广义坐标;而和分别为联系柔性臂空间机器人、目标航天器与接触点的jacobian矩阵;为碰撞力向量;
50、综合和,可得:
51、
52、式中,下标、分别代表该向量处于碰撞前、后;
53、进而得到抓捕碰撞后柔性臂空间机器人的空间站载体及各关节的速度为:
54、
55、式中,,。
56、建立如下式所示的抓捕碰撞冲击影响下组合体航天器系统的动力学方程:
57、
58、式中,,。
59、作为优选,退步小波神经网络包括输入层、小波层和输出层,退步小波神经网络中,设输入变量为,输出变量为,各层的输入输出关系如下:
60、输入层:该层的每个节点的输入输出的关系表达式为:
61、;
62、式中,为输入变量的第 i个输入分量,表示输入层的输出分量,,为输入分量的个数;
63、小波层:该层每个节点的激活函数是通过伸缩和平移小波母函数来得到,其中小波母函数为:
64、;第个输入分量对应的第个小波神经元的输入输出关系为:
65、,
66、;
67、式中,,为小波神经元的个数,分别为小波母函数的伸缩系数和平移系数,表示第个输入分量对应的第个小波神经元的输出分量;
68、输出层:该层第个节点的输入输出关系为:
69、;
70、式中,,为退步小波神经网络的输出分量的个数,为退步小波神经网络的输出分量,为第个输出分量与第个小波神经元的权值,写成矢量形式为:
71、;
72、式中,为退步小波神经网络的输出权值矩阵;为小波层的输出矢量,,为可调整伸缩和平移参数矢量。
73、作为优选,自适应调节律为:
74、;
75、 ;
76、;
77、其中,均为对角正定常值矩阵。
78、相比于现有技术,本发明的有益效果为:
79、(1)本发明的控制方法通过仅设计一个控制输入既可实现组合体航天器系统镇定控制又能抑制柔性臂的振动,相较于传统基于奇异摄动理论将系统分解为快、慢子系统分别设计两个控制器的控制方案,具有算法简单、调节方便、计算量小的特点,更适于空间机器人系统抓捕目标航天器的实际应用;
80、(2)本发明利用退步小波神经网络鲁棒控制算法进行控制,则既可实现组合体航天器快速镇定控制又能抑制柔性臂的振动;在机器人抓取运动中,退步小波神经网络(wnn-smc)可以用于控制机器人的运动轨迹,抵制控制过程中的非线性不确定性和噪声干扰,同时可以在运动的过程中进行路径跟踪等控制操作。而鲁棒控制则可以用于处理机器人轨迹控制中的参数不确定性,对机器人的力学特性等因素进行补偿。因此,对机器人抓取运动中机器人轨迹的控制中,可以将wnn-smc和鲁棒控制相结合,以实现更加鲁棒的控制效果和精度。具体而言,可以使用wnn-smc来控制机器人的运动轨迹,抑制非线性不确定性和测量噪声的影响,同时使用鲁棒控制来调整机器人运动轨迹中的参数不确定性,解决由于参数变化或非主要因素导致的控制误差问题。这样,机器人可以更加适应性地响应不同的运动物体,具有更高的抓取精度和鲁棒性。并有效解决抓捕目标航天器过程的碰撞冲击会引起空间机器人柔性臂的振动,若抓捕后不对组合体航天器进行主动控制,将严重影响其稳定,甚至对其结构造成损坏等问题。
81、(3)本发明中由于wnn的隐层使用小波母函数,具有结构简单、能够以任意精度逼近任意非线性函数和收敛速度快等特点,从而使得设计的控制方案能够较快完成镇定控制并抑制振动。
- 还没有人留言评论。精彩留言会获得点赞!