一种基于智能物流搬运的机械臂系统
本申请涉及物流搬运设备,尤其涉及一种基于智能物流搬运的机械臂系统。
背景技术:
1、智能物流是利用集成智能化技术,使物流系统能模仿人的智能,具有思维,感知,学习,推理判断和自行解决物流中某些问题的能力,在物流作业过程中的大量运筹与决策的智能化;以物流管理为核心,实现物流过程中运输,存储,包装,装卸等环节的一体化和智能物流系统的层次化,物流搬运是指协调、合理地将物料等进行移动、储存和控制的一系列的相关设备和装置,因为物流搬运只增加成本,不增加产品使用价值,所以物流搬运系统的合理与否,直接影响生产效率和经济效益。
2、在智能物流搬运过程中,需要使用到机械臂等设备的配合,机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统,因其独特的操作灵活性,已在工业装配,安全防爆等领域得到广泛应用,在物流搬运中,传统的机械臂只能对物品进行简单的转运,不能够对搬运的物品进行自行记录,而且操控较为繁琐,也不方便工作人员查看搬运画面,为工作人员带来一定的麻烦,因此为解决以上问题,我们提供了一种基于智能物流搬运的机械臂系统。
技术实现思路
1、本发明的目的在于提供一种基于智能物流搬运的机械臂系统,以解决上述背景技术中提出的问题。
2、本申请实施例采用下述技术方案:
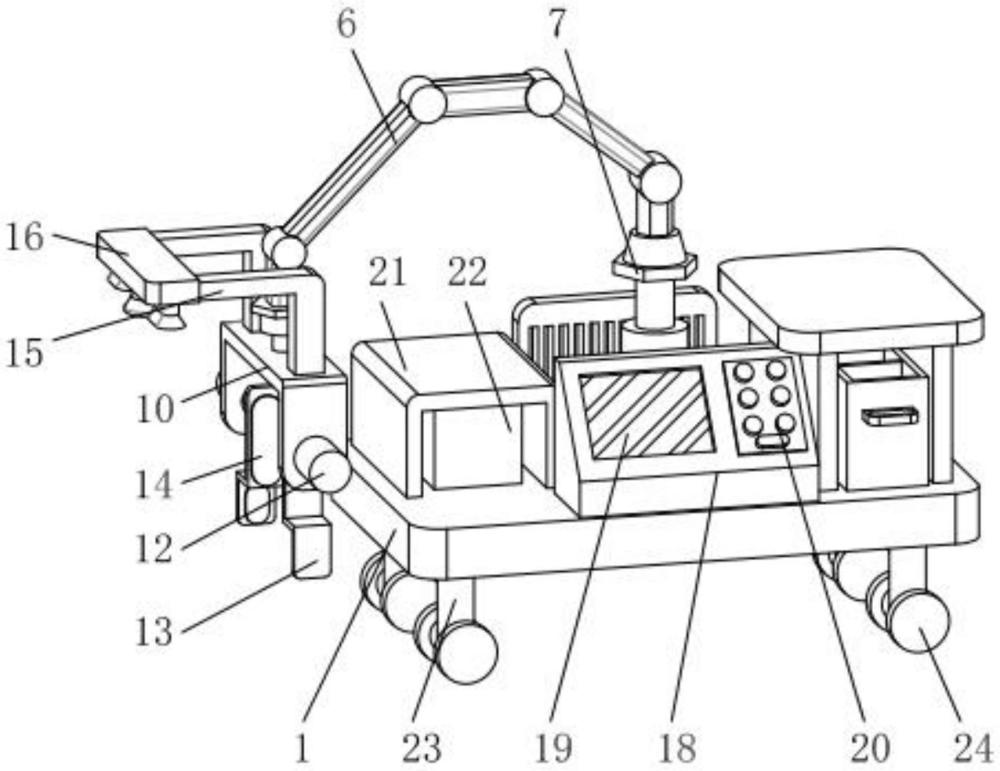
3、一种基于智能物流搬运的机械臂系统,包括底板和电源,所述底板的上表面开设有凹槽,所述凹槽的内部安装有正反电机,所述正反电机的输出端固定连接有固定座,所述固定座的上表面安装有第一液压杆,所述第一液压杆的输出端固定连接有支撑座,所述支撑座的上表面安装有机械臂本体,所述机械臂本体的左端安装有定位板,所述定位板的底面安装有驱动电机,所述驱动电机的输出端固定连接有固定架,所述固定架的外表面开设有相对称的通孔,所述固定架的外表面安装有相对称的第二液压杆,两个所述第二液压杆的输出端均固定连接有定位夹板,两个所述定位夹板相互靠近的一侧面均固定连接有防护垫,所述固定架的上表面固定连接有相对称的固定角板,两个所述固定角板的左端共同固定连接有固定板,所述固定板的底面安装有摄像头,所述底板的上表面安装有控制器,所述控制器的正面设有显示屏,所述控制器的正面设有控制面板。
4、优选的,所述底板的上表面固定连接有防护罩,所述防护罩的内部安装有蓄电池。
5、优选的,所述底板的底面固定连接有四个支撑腿,每个所述支撑腿的底端均安装有制动万向轮。
6、优选的,所述固定板的底面固定连接有相对称的灯座,两个所述灯座的底面均安装有照明灯。
7、优选的,所述凹槽的内侧壁固定连接有相对称的固定杆,两个所述固定杆相互靠近的一端均与正反电机的外表面固定连接,所述底板的上表面安装有防护栏。
8、优选的,所述底板的上表面固定连接有相对称的支撑板,两个所述支撑板的上表面共同固定连接有载板。
9、优选的,所述底板的上表面放置有收纳箱,所述收纳箱的内壁固定连接有等距离排列的隔板,所述收纳箱的外表面固定连接有相对称的扣板。
10、优选的,所述电源通过导线与控制器电连接,所述控制器通过导线与正反电机电连接,所述控制器通过导线与驱动电机电连接,所述控制器通过导线与机械臂本体电连接,所述控制器通过导线与摄像头电连接,所述机械臂本体通过导线与第一液压杆电连接,所述机械臂本体通过导线与第二液压杆电连接,所述摄像头通过导线与显示屏电连接,所述显示屏通过导线电连接有数据储存器,所述电源通过导线电连接有保护线。
11、本申请实施例采用的上述至少一个技术方案能够达到以下有益效果:
12、该基于智能物流搬运的机械臂系统,利用正反电机能够带动机械臂本体旋转,通过机械臂本体能够对固定架进行多角度延伸,利用第一液压杆能够带动机械臂本体上下运动,利用驱动电机能够带动固定架旋转,方便工作人员调节对物品夹持的角度,利用第二液压杆和定位夹板的配合,能够对搬运的物品进行夹紧,利用摄像头对搬运的物品进行拍摄,利用显示屏呈现搬运物品的画面,通过数据储存器能够对搬运物品的数据进行记录,方便工作人员进行查看,提高工作人员的工作效率。
技术特征:
1.一种基于智能物流搬运的机械臂系统,包括底板(1)和电源(34),其特征在于:所述底板(1)的上表面开设有凹槽(2),所述凹槽(2)的内部安装有正反电机(3),所述正反电机(3)的输出端固定连接有固定座(4),所述固定座(4)的上表面安装有第一液压杆(5),所述第一液压杆(5)的输出端固定连接有支撑座(7),所述支撑座(7)的上表面安装有机械臂本体(6),所述机械臂本体(6)的左端安装有定位板(8),所述定位板(8)的底面安装有驱动电机(9),所述驱动电机(9)的输出端固定连接有固定架(10),所述固定架(10)的外表面开设有相对称的通孔(11),所述固定架(10)的外表面安装有相对称的第二液压杆(12),两个所述第二液压杆(12)的输出端均固定连接有定位夹板(13),两个所述定位夹板(13)相互靠近的一侧面均固定连接有防护垫(14),所述固定架(10)的上表面固定连接有相对称的固定角板(15),两个所述固定角板(15)的左端共同固定连接有固定板(16),所述固定板(16)的底面安装有摄像头(17),所述底板(1)的上表面安装有控制器(18),所述控制器(18)的正面设有显示屏(19),所述控制器(18)的正面设有控制面板(20)。
2.根据权利要求1所述的一种基于智能物流搬运的机械臂系统,其特征在于:所述底板(1)的上表面固定连接有防护罩(21),所述防护罩(21)的内部安装有蓄电池(22)。
3.根据权利要求1所述的一种基于智能物流搬运的机械臂系统,其特征在于:所述底板(1)的底面固定连接有四个支撑腿(23),每个所述支撑腿(23)的底端均安装有制动万向轮(24)。
4.根据权利要求1所述的一种基于智能物流搬运的机械臂系统,其特征在于:所述固定板(16)的底面固定连接有相对称的灯座(27),两个所述灯座(27)的底面均安装有照明灯(28)。
5.根据权利要求1所述的一种基于智能物流搬运的机械臂系统,其特征在于:所述凹槽(2)的内侧壁固定连接有相对称的固定杆(25),两个所述固定杆(25)相互靠近的一端均与正反电机(3)的外表面固定连接,所述底板(1)的上表面安装有防护栏(26)。
6.根据权利要求1所述的一种基于智能物流搬运的机械臂系统,其特征在于:所述底板(1)的上表面固定连接有相对称的支撑板(29),两个所述支撑板(29)的上表面共同固定连接有载板(30)。
7.根据权利要求1所述的一种基于智能物流搬运的机械臂系统,其特征在于:所述底板(1)的上表面放置有收纳箱(31),所述收纳箱(31)的内壁固定连接有等距离排列的隔板(32),所述收纳箱(31)的外表面固定连接有相对称的扣板(33)。
8.根据权利要求1所述的一种基于智能物流搬运的机械臂系统,其特征在于:所述电源(34)通过导线与控制器(18)电连接,所述控制器(18)通过导线与正反电机(3)电连接,所述控制器(18)通过导线与驱动电机(9)电连接,所述控制器(18)通过导线与机械臂本体(6)电连接,所述控制器(18)通过导线与摄像头(17)电连接,所述机械臂本体(6)通过导线与第一液压杆(5)电连接,所述机械臂本体(6)通过导线与第二液压杆(12)电连接,所述摄像头(17)通过导线与显示屏(19)电连接,所述显示屏(19)通过导线电连接有数据储存器(36),所述电源(34)通过导线电连接有保护线(35)。
技术总结
本发明公开了一种基于智能物流搬运的机械臂系统,包括底板和电源,所述底板的上表面开设有凹槽,所述凹槽的内部安装有正反电机,所述正反电机的输出端固定连接有固定座,所述固定座的上表面安装有第一液压杆,所述第一液压杆的输出端固定连接有支撑座,所述支撑座的上表面安装有机械臂本体,所述机械臂本体的左端安装有定位板,所述定位板的底面安装有驱动电机,所述驱动电机的输出端固定连接有固定架,所述固定架的外表面开设有相对称的通孔。本发明利用摄像头对搬运的物品进行拍摄,利用显示屏呈现搬运物品的画面,通过数据储存器能够对搬运物品的数据进行记录,方便工作人员进行查看,提高工作人员的工作效率。
技术研发人员:范勇,吴姝芹,伍玉霞,王金辉,姜玉亭,廖秋丽,李珊,杨孔林,康世杰
受保护的技术使用者:桂林电子科技大学
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!