一种地下管廊巡检机器人及其控制方法
本发明涉及地下管廊巡检领域,更具体地说,涉及一种地下管廊巡检机器人及其控制方法。
背景技术:
1、巡检机器人是为解决传统人工巡检效率低、危险系数高、实时性差等问题而设计的巡检装置。应用于地下管廊这一场景中,需要具备高精度定位巡航能力以及全面且精准的数据采集能力。目前已有的方案,在定位巡航方面,大多通过架设导轨来实现,这避免了机器人行进过程中遇到障碍物难以躲避的问题,然而,在管廊长度日益增长、管廊布局日益错综复杂的变化下,架设导轨将带来巨大的成本支出,还将极大地限制巡检机器人的机动性与灵活性。在数据采集方面,目前已有的方案,巡检机器人仅能够采集数据,对于事故类型的判断仍依赖人工,效率低且无法避免人为判断的失误。因此,现有技术中,地下管廊巡检机器人导轨成本高、机动性差、缺乏数据分析判断能力。
技术实现思路
1、本发明的目的在于,提供一种地下管廊巡检机器人及其控制方法,能低成本地提高巡检和问题排查效率、提升机器人自主决策能力、适应不同布局的地下管廊。
2、本发明解决其技术问题所采用的技术方案是提供一种地下管廊巡检机器人,包括:主控制器、行动单元、超宽带uwb定位模块、三维激光雷达、双目深度摄像头、惯性测量单元imu、声发射传感器、气体传感器、红外摄像头、电源模块;主控制器,分别与行动单元、超宽带uwb定位模块、三维激光雷达、双目深度摄像头、惯性测量单元imu、声发射传感器、气体传感器、红外摄像头、电源模块进行电连接,主控制器与预设超宽带uwb基站进行无线连接;行动单元,包括行动主控模块、行走执行模块;行动主控模块,配置为,控制行走执行模块按照预设方向行进;行走执行模块,包括底盘、悬架和车轮,悬架,配置为,四轮独立悬挂方式,车轮,配置为,麦克纳姆轮;超宽带uwb定位模块,用于与预设超宽带uwb基站进行通讯,采集地下管廊巡检机器人到各预设超宽带uwb基站的距离信息,将距离信息传输至主控制器;三维激光雷达,配置为,采集环境特征点,识别障碍物的距离和形状;双目深度摄像头,配置为,采集图像信息,向主控制器传输图像信息;惯性测量单元imu,配置为,获取地下管廊巡检机器人的加速度、姿态、速度信息;声发射传感器,用于获取地下管廊中气体运输管道的气体泄漏信息;气体传感器,用于获取地下管廊中泄露气体的类型信息;红外摄像头,用于获取地下管廊中热力管道的泄露信息;电源模块,配置为,充电协议pd电源适配器,采用usb外形接口标准type-c,电源模块用于给地下管廊巡检机器人供电。
3、进一步地,上述的地下管廊巡检机器人的主控制器,配置为,进行图像处理和边缘计算,对行动单元、超宽带uwb定位模块、三维激光雷达、双目深度摄像头、惯性测量单元imu、声发射传感器、气体传感器、红外摄像头、电源模块进行控制;主控制器,集成电源管理芯片,电源管理芯片提供多电压输出,用于向超宽带uwb定位模块、三维激光雷达、双目深度摄像头、惯性测量单元imu、声发射传感器、气体传感器、红外摄像头供电。
4、进一步地,上述的地下管廊巡检机器人的行动单元,配置为,按预设路线行驶,在预设多个检测点停留作业,在运行过程中接收主控制器传输的行动指令信号,将行动指令信号转换为电机驱动信号,从而控制各麦克纳姆轮的转速,实现地下管廊巡检机器人的行进。
5、进一步地,上述的地下管廊巡检机器人的惯性测量单元imu,包括3个正交方向的陀螺仪和3个正交方向的加速度计;陀螺仪,配置为,通过陀螺仪中高速旋转的转子测量三个正交方向上的角速度,进而获取地下管廊巡检机器人的姿态信息;加速度计内部设置有质量块、压电材料,加速度计,配置为,当加速度计的速度发生变化时,质量块对压电材料进行压缩或拉伸,压电材料产生加速度信号,进而获得三个正交方向上的加速度信息,最终获取地下管廊巡检机器人的位移距离信息。
6、进一步地,上述的地下管廊巡检机器人的三维激光雷达向四周发射激光束,同时接收反射的激光信号,三维激光雷达设置有激光雷达处理器,激光雷达处理器对接收反射的激光信号进行处理分析,通过激光束的运动时间、方位和地下管廊巡检机器人的位置确定障碍物相对地下管廊巡检机器人的距离和方位,进而生成三维点云数据,实现对障碍物的辨别,为路径规划提供参考。
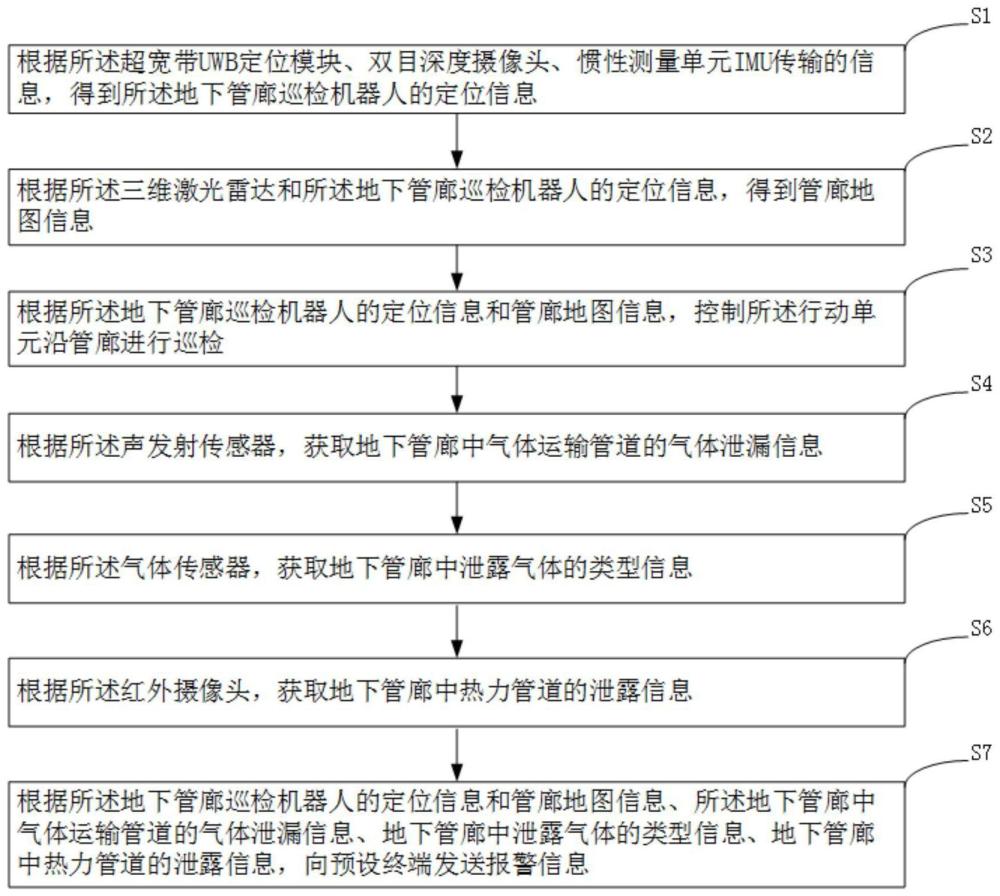
7、本发明提供一种地下管廊巡检机器人控制方法,用于控制上述的地下管廊巡检机器人,包括:s1:根据超宽带uwb定位模块、双目深度摄像头、惯性测量单元imu传输的信息,得到地下管廊巡检机器人的定位信息;s2:根据三维激光雷达和地下管廊巡检机器人的定位信息,得到管廊地图信息;s3:根据地下管廊巡检机器人的定位信息和管廊地图信息,控制行动单元沿管廊进行巡检;s4:根据声发射传感器,获取地下管廊中气体运输管道的气体泄漏信息;s5:根据气体传感器,获取地下管廊中泄露气体的类型信息;s6:根据红外摄像头,获取地下管廊中热力管道的泄露信息;s7:根据地下管廊巡检机器人的定位信息和管廊地图信息、地下管廊中气体运输管道的气体泄漏信息、地下管廊中泄露气体的类型信息、地下管廊中热力管道的泄露信息,向预设终端发送报警信息。
8、进一步地,上述的地下管廊巡检机器人控制方法的步骤s1包括:s11:利用双目深度摄像头获取目标物视频,根据目标物视频得到预设数量帧数的目标物图片,初始化第一帧图片,得到第一fast特征点;s12:根据目标物图片的第二帧图片,对第一fast特征点进行跟踪,利用光流追踪lk算法处理、对极几何约束处理和两点随机抽样一致法,剔除第二帧图片的左右目图片中误匹配特征点以及超出图像边界的特征点,得到第二fast特征点;s13:根据目标物图片的第三帧图片,对第二fast特征点进行跟踪处理,利用光流追踪lk算法处理、对极几何约束处理和两点随机抽样一致法,剔除第三帧图片的左右目图片中误匹配特征点以及超出图像边界的特征点,如果第三帧图片出现新的特征点,则加入新的特征点,得到第三fast特征点;针对后续帧的图片,不断重复跟踪处理,得到实时特征点坐标;s14:根据惯性测量单元imu传输的信息和实时特征点坐标,进行扩展卡尔曼滤波,得到双目深度摄像头当前位姿的最优估计值;s15:获取超宽带uwb定位模块传输的信息,将双目深度摄像头当前位姿的最优估计值与超宽带uwb定位模块传输的信息进行融合,得到地下管廊巡检机器人的定位信息。
9、进一步地,上述的地下管廊巡检机器人控制方法的步骤s11包括:利用双目深度摄像头获取目标物视频,根据目标物视频得到预设数量帧数的目标物图片,每一帧的目标物图片包括左目图片和右目图片,获取第一帧的左目图片中的加速分割测试特征fast特征点,将第一帧的左目图片中的fast特征点投影至第一帧的右目图片中进行双目特征点匹配、光流追踪lk算法处理和对极几何约束处理,剔除追踪到图像外的特征点,将剩余的fast特征点进行网格划分,得到第一fast特征点。
10、进一步地,上述的地下管廊巡检机器人控制方法的步骤s14包括:获取实时特征点坐标、惯性测量单元imu传输的信息,惯性测量单元imu传输的信息包括重力信息及偏差信息,构建微分方程组,微分方程组包括状态矩阵、输入矩阵,对重力信息及偏差信息进行初始化,得到微分方程组中的状态矩阵以及输入矩阵,根据微分方程组,得到状态转移矩阵;根据状态转移矩阵,进行状态预测、状态扩增以及状态更新,得到双目深度摄像头当前位姿的最优估计值。
11、进一步地,上述的地下管廊巡检机器人控制方法的步骤s4包括:当地下管廊中的管道材料在塑性变形或损伤破坏过程中会释放应变能或产生应力波,声发射传感器接收到应变能或应力波的应力-应变信号,将应力-应变信号进行数据分析处理,得到地下管廊中气体运输管道的气体泄漏信息,如公式:
12、g=a×(u实测-u本底)b (1)
13、ulm=u0m×e-c×l (2)
14、其中,g为管道泄漏率,u实测为声发射传感器强度信号实测值,u本底为管道本底噪声,a和b为管道泄漏系数,为无量纲系数;ulm为l米处声发射传感器信号实测值,u0m为0米处声发射传感器信号实测值,e为自然常数,c为光速,l为两个声发射测点距离。
15、实施本发明提供的一种地下管廊巡检机器人及其控制方法,具有以下有益效果:
16、本发明采用uwb技术与视觉定位技术相结合,uwb技术本身具备高精度低功耗的特点,同时能够为数据通信提供超宽频信号,但在uwb信号刷新的较短时间内,基站是无法确定uwb定位标签的位置的,会导致动态定位的精度降低,因此本发明引入了视觉定位,由视觉定位补齐uwb信号缺失期间机器人的行进轨迹,能够提升机器人的定位精度。同时,引入的视觉定位技术使机器人具备自主规划行进路线和避障的功能,不再需要架设导轨,这样不仅能够降低成本、节约管廊面积占用,同时还能够适应不同布局的管廊,提高机器人路线规划的鲁棒性。在数据采集与分析方面,将利用巡检机器人搭载的各类传感器及摄像头采集数据,利用机器学习与图像处理技术实现对常见地下管廊问题的自主判断。因此,本发明一方面实现了机器人自主规划路线和避障,避免了架设导轨,降低巡检成本、提高机器人灵活性、节约管廊空间、能够使用更加布局复杂的地下管廊,另一方面具备高精度定位能力以及对事故的自主判断能力,能够准确给出故障位置、故障类型判断以及高清图像信息,极大提高事故发生后的解决效率。
- 还没有人留言评论。精彩留言会获得点赞!