一种检测机器人的制作方法
本发明涉及扭力品质检测,具体为一种可用于扭力品质检测的检测机器人。
背景技术:
1、扭力品质检测,一般是通过静态扭矩的方式进行检查,而静态扭矩一般是拧紧后对螺栓拧紧点进行复检,确认拧紧扭矩的衰减大小,静态扭矩是在紧固之后测量的,有的情况下,也把它叫作残余扭矩。
2、现有的静态扭矩多数依靠人工检测,检测工具简单,操作便利,所需设备成本低,能更直观地显示最终的拧紧效果,但相应的,存在以下缺陷:
3、1:通过智能扳手只能对常见的硬连接进行检测,无法对软连接进行检测;
4、2:人工操作时可能会由于人员变动或人员生理状态变化而造成检测数据的不稳定,且常规工厂只能培养指定的专业人员来对应,造成通用性不足及用工成本高等问题。
5、为此,我们提出一种扭力品质检测机器人。
技术实现思路
1、鉴于上述和/或现有一种扭力品质检测机器人中存在的问题,提出了本发明。
2、因此,本发明的目的是提供一种扭力品质检测机器人,通过支架装置、侧边驱动及换位装置和第一扭矩检测装置的配合,能够对检测物件扳手式转动和硬连接的扭矩检测,通过第一扭矩检测装置和第二扭矩检测装置能够对软连接进行扭矩检测,能够解决上述提出现有的问题。
3、为解决上述技术问题,根据本发明的一个方面,本发明提供了如下技术方案:
4、一种扭力品质检测机器人,其包括:
5、支架装置,其放置于地面,且通过支架装置能够对侧边驱动及换位装置进行环形驱动;
6、夹持组件,其安装在支架装置的表面左端,且通过夹持组件能够对检测平台组件进行夹持和托举;
7、检测平台组件,其能够将检测物旋转放置在检测平台组件的表面,且通过检测平台组件能够对检测物进行扭矩检测;
8、侧边驱动及换位装置,其滑动连接在支架装置的内部之间,且通过侧边驱动及换位装置能够被支架装置的驱动端进行环形驱动,并通过侧边驱动及换位装置能够对第一扭矩检测装置进行升降和换位操作;
9、第一扭矩检测装置,其安装在侧边驱动及换位装置的表面,且能够对检测平台组件的检测物进行硬连接和软连接,同时能够在连接时,对检测物进行若干组扭矩检测;
10、高度调节装置,其安装在支架装置的顶部,并使第二扭矩检测装置安装在输出端,且通过高度调节装置能够对第二扭矩检测装置进行高度调节,从而能够使第二扭矩检测装置与第一扭矩检测装置配合对检测平台组件表面的检测物进行扭矩检测。
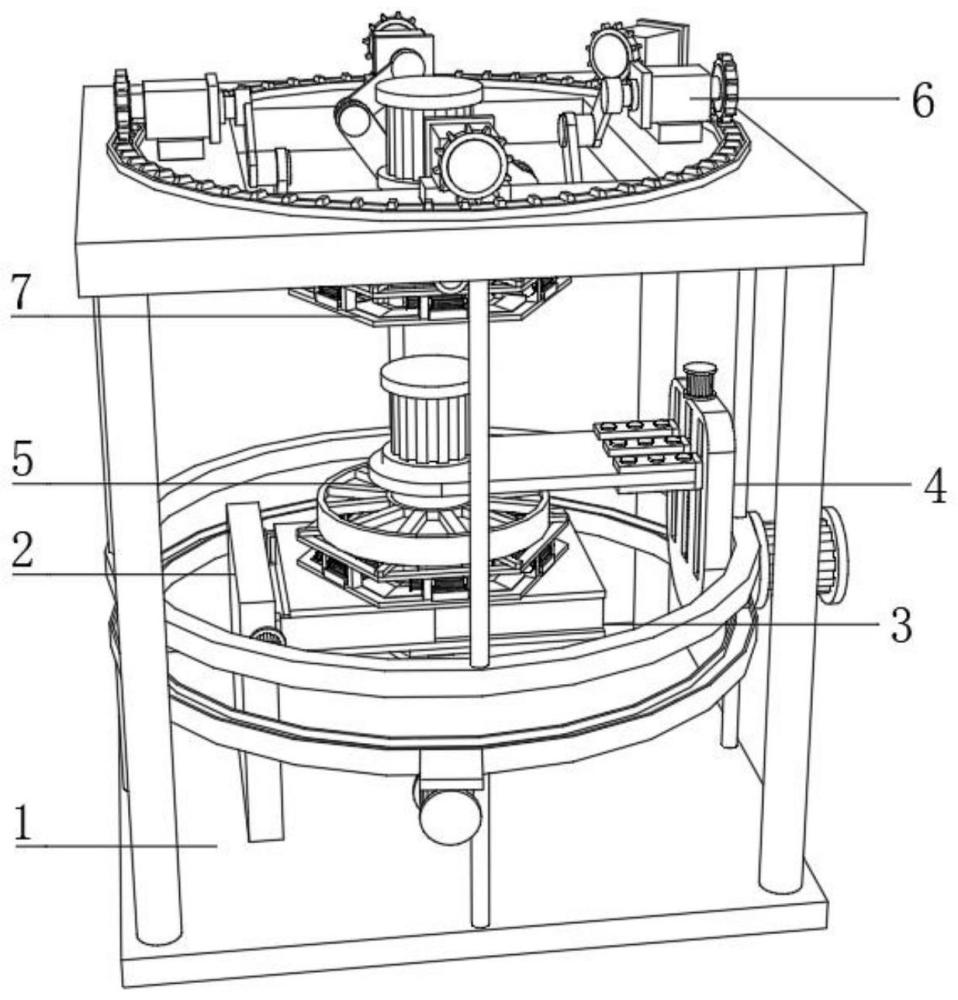
11、作为本发明所述的一种扭力品质检测机器人的一种优选方案,其中:所述支架装置包括:
12、底板,其放置于地面;
13、支柱,其设置在底板的表面四周,并使顶部连接顶板的底部,且通过支柱能够对顶板进行支撑;
14、通孔,其设置在顶板的表面,且能够方便对第二扭矩检测装置进行升降;
15、下环轨道组件,其安装在底板的表面,并使输出端连接侧边驱动及换位装置,且通过侧边驱动及换位装置能够被下环轨道组件进行环形驱动;
16、上环轨道,其安装在顶板的底部,且通过下环轨道组件与上环轨道配合,能够对侧边驱动及换位装置进行限位和导向。
17、作为本发明所述的一种扭力品质检测机器人的一种优选方案,其中:所述下环轨道组件包括:
18、下环轨道,其安装在底板的表面,且通过下环轨道与上环轨道配合,能够对侧边驱动及换位装置进行限位和导向;
19、驱动槽,其设置在下环轨道的底部,且通过驱动槽能够被驱动齿轮贯穿,使驱动齿轮与第一环板底部接触;
20、第一环板,其滑动连接在下环轨道的内部,并使表面连接侧边驱动及换位装置的底部;
21、第一齿槽,其设置在第一环板的底部;
22、驱动电机,其安装在下环轨道的外壁一端,并使输出端连接驱动齿轮,且通过驱动齿轮与第一齿槽啮合连接,从而能够使驱动齿轮带动第一环板在下环轨道内部进行转动。
23、作为本发明所述的一种扭力品质检测机器人的一种优选方案,其中:所述夹持组件包括:
24、立板,其设置在底板的表面左端;
25、双向螺纹杆,其转动连接在立板的内部;
26、夹板,其滑动连接在立板的内部,并使内部螺纹连接双向螺纹杆的外壁两端,且通过双向螺纹杆能够带动夹板相互靠近或远离,从而能够使夹板对检测平台组件进行夹持和托举;
27、夹持电机,其安装在立板的侧面,并使输出端连接双向螺纹杆的一侧端口。
28、作为本发明所述的一种扭力品质检测机器人的一种优选方案,其中:所述检测平台组件包括:
29、检测平台,其能够被两组夹板进行夹持和托举;
30、夹持槽,其设置在检测平台的外壁两端,且通过夹持槽能够被夹板进行夹持,同时能够对夹板进行限位;
31、检测螺栓,其设置为检测物,并螺纹连接在检测平台的内部,且通过检测螺栓与检测平台连接,实现硬连接;
32、检测螺母,其螺纹连接在检测螺栓的外壁,且通过检测螺母与检测螺栓连接,实现软连接。
33、作为本发明所述的一种扭力品质检测机器人的一种优选方案,其中:所述侧边驱动及换位装置包括:
34、限位板,其底部连接在第一环板的表面,且能够驱动第一环板进行环形运动,同时限位板能够被下环轨道与上环轨道进行限位;
35、换位电机,其内壁滑动连接在下环轨道与上环轨道的外壁,并使输出端贯穿限位板连接升降组件的外壁下端;
36、升降组件,其外壁滑动连接在下环轨道与上环轨道的内壁,且通过升降组件与活动组件连接,并能够对活动组件进行升降驱动;
37、活动组件,其连接在升降组件的输出端,且通过活动组件能够对第一扭矩检测装置进行安装。
38、作为本发明所述的一种扭力品质检测机器人的一种优选方案,其中:所述升降组件包括:
39、升降板,其外壁滑动连接在下环轨道与上环轨道的内壁,并使换位电机的输出端连接升降板的外壁下端,且通过被换位电机进行换位驱动;
40、升降螺杆,其转动连接在升降板的内部;
41、升降电机,其安装在升降板的顶部,并使输出端连接升降螺杆的顶部端口,且通过升降电机能够对升降螺杆进行旋转驱动;
42、升降槽,其设置在升降板的内壁两端,且通过升降槽能够对活动组件进行限位和导向;
43、所述活动组件包括:
44、活动板,其侧面一端的中间设有内螺纹块,并使内螺纹块的内部螺纹连接升降螺杆的外壁,且侧面一端的两侧连接活动块,并使活动块滑动连接在升降槽的内部,且通过活动板能够对第一扭矩检测装置进行安装和放置。
45、作为本发明所述的一种扭力品质检测机器人的一种优选方案,其中:所述第一扭矩检测装置包括:
46、检测电机,其安装在活动板的表面,且能够带动限位组件进行转动;
47、扭矩传感器,其转动连接在活动板的底部,并使顶部连接检测电机的输出端,且通过扭矩传感器能够对按压组件的转动进行扭矩检测;
48、连接罩,其连接在扭矩传感器的底部;
49、限位组件,其顶部连接在连接罩的底部,且内部能够对按压组件进行限位和安装;
50、按压组件,其安装在限位组件的内部四周,且通过按压组件能够对检测螺栓和检测螺母的外壁进行按压,并能够与扭矩传感器配合,对检测螺栓和检测螺母进行转动进行扭矩检测;
51、安装板,其安装在下侧的外框支架与内框支架之间;
52、压力传感器,其安装在安装板的内部,且通过压力传感器能够对检测螺栓的旋转压力进行检测。
53、作为本发明所述的一种扭力品质检测机器人的一种优选方案,其中:所述限位组件包括:
54、外框支架,其与内框支架配合连接,能够对按压组件进行安装和限位;
55、所述按压组件包括:
56、第一限位柱,其安装在两组外框支架之间;
57、第二限位柱,其安装在两组内框支架之间;
58、限位辊,其安装在第一限位柱和第二限位柱的内壁,且通过限位辊能够对按压板的滑动进行限位和导向;
59、按压驱动电机,其安装在第二限位柱的外壁;
60、滚动齿牙辊,其转动连接在两组第二限位柱之间,并使一端连接按压驱动电机的输出端,且通过滚动齿牙辊能够对按压板进行活动驱动;
61、按压板,其外壁两端设有限位槽,并使限位槽内部滑动连接限位辊,同时,按压板的表面与滚动齿牙辊啮合连接,且通过滚动齿牙辊能够对按压板进行活动驱动。
62、作为本发明所述的一种扭力品质检测机器人的一种优选方案,其中:所述高度调节装置包括:
63、限位轨道,其安装在顶板的顶部;
64、齿牙环链,其滑动连接在限位轨道的内部;
65、环形驱动电机,其安装在顶板的顶部一侧,并使输出端连接环形驱动齿轮,且通过环形驱动齿轮连接齿牙环链的表面,从而能够使环形驱动齿轮带动齿牙环链进行环形驱动;
66、高度调节组件,其安装在顶板的顶部四周,并使输出端连接第二扭矩检测装置的外壁四周;
67、所述高度调节组件包括:
68、限位箱,其安装在顶板的顶部四周;
69、随动齿轮,其连接在限位箱的外侧端口,并使随动齿轮啮合连接齿牙环链的表面,且通过随动齿轮能够带动齿牙环链进行环形运动;
70、随动杆,其连接在限位箱的内侧端口,并使外壁下端转动连接拉扯杆的外壁上端,同时,拉扯杆的外壁下端转动连接第二扭矩检测装置的外壁,且通过随动杆与拉扯杆的配合,能够带动第二扭矩检测装置进行高度调节。
71、与现有技术相比:
72、通过支架装置与侧边驱动及换位装置的配合,能够使第一扭矩检测装置对检测螺栓进行硬连接的扭矩检测,同时,通过支架装置与侧边驱动及换位装置的驱动能够对检测螺栓进行扳手式转动,并实现扳手式转动的稳定性,同时能够对扳手式转动的检测螺栓的硬连接进行扭矩和压力的检测;
73、通过第一扭矩检测装置与第二扭矩检测装置的配合,使第一扭矩检测装置对检测螺母进行连接,第二扭矩检测装置对检测螺栓进行连接,从而能够对检测螺栓的软连接进行扭矩检测,进而实现全域性的扭力检测应用,包括常见的硬连接及智能扳手没法检测的软连接;
74、通过机械的多种扭动方式,能够稳定对硬连接和软连接进行稳定检测,解决传统只能人工检测的质检工序,并克服了人工检测存在的诸多常见问题,且实现避免人工操作时因人员变动或人员生理状态变化而造成检测数据的不稳定的问题。
- 还没有人留言评论。精彩留言会获得点赞!