一种轮胎装配机械手的制作方法
本申请涉及轮胎装配,特别涉及一种轮胎装配机械手。
背景技术:
1、传统的商用车装配生产线,轮胎通过轮胎输送线送至装配线边后,由人工通过吊钩式吊具夹持轮胎轮辋再通过人工拉动kpk将轮胎移动到车桥轮毂安装位置,为实现轮胎与轮毂轻重点的配合需人工将轮胎竖直放在地上转动到合适位置后再次夹取轮胎再次人工追线进行装配。人工操作繁琐,工作强度大,效率低下,易产生夹具划伤轮辋及在移动及转动轮胎的过程中易发生轮胎掉落的安全隐患。
技术实现思路
1、本申请提供一种轮胎装配机械手,可以解决相关技术中人工操作繁琐,工作强度大,效率低下,易产生夹具划伤轮辋及在移动及转动轮胎的过程中易发生轮胎掉落的安全隐患的问题。
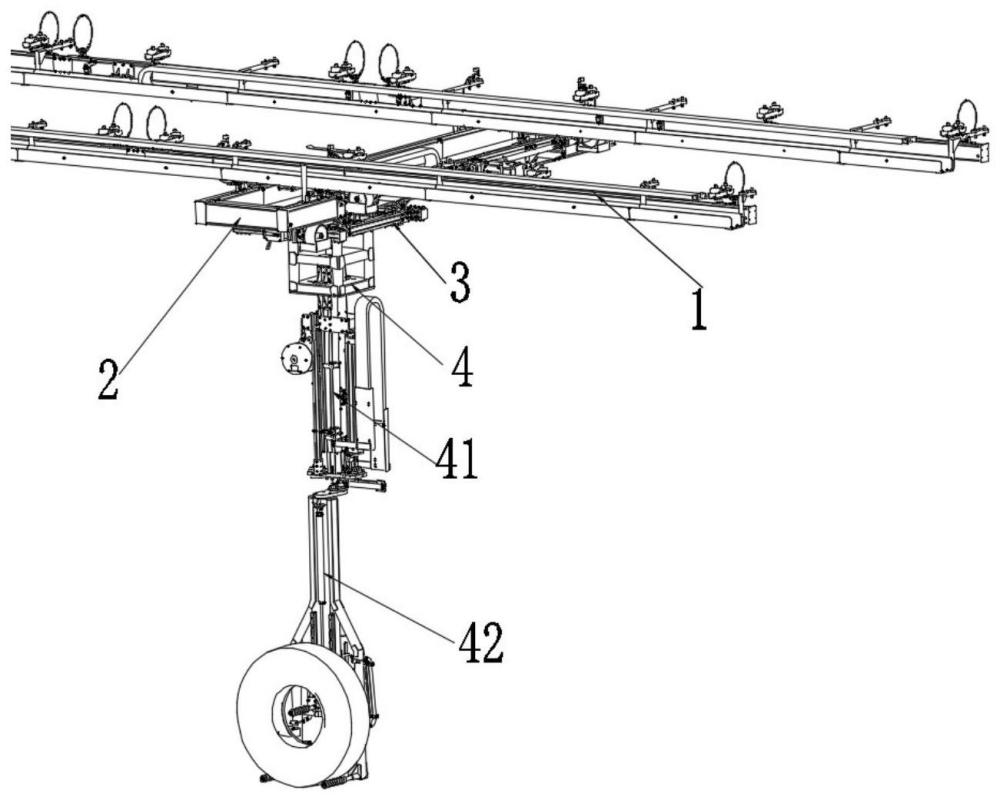
2、本申请提供一种轮胎装配机械手,其包括:移动单元、助力机械手和控制单元,所述移动单元包括轨道机构、纵向随行机构和横向随行机构,所述纵向随行机构和横向随行机构均与轨道机构相连接;所述助力机械手与纵向随行机构和横向随行机构相连接,所述助力机械手上设置有轮胎夹持空间;所述控制单元与移动单元和助力机械手相连接,以控制纵向随行机构和横向随行机构驱使助力机械手相对于轨道机构移动。
3、一些实施例中,所述纵向随行机构包括:轨道框架、驱动组件和第一摩擦轮,所述轨道框架与轨道机构滑动连接;所述驱动组件设置于轨道框架上;所述第一摩擦轮与轨道机构滚动接触,所述驱动组件与第一摩擦轮连接,以控制第一摩擦轮驱使轨道框架相对于轨道机构移动。
4、一些实施例中,所述驱动组件包括:第一变频电机和第一离合机构,所述第一变频电机安装于轨道框架上,且通过连接件与第一摩擦轮连接;所述第一离合机构设置于轨道框架上,且与第一摩擦轮连接。
5、一些实施例中,所述纵向随行机构可移动的设置于轨道机构上;所述横向随行机构可移动的设置于纵向随行机构上。
6、一些实施例中,所述横向随行机构包括:连接本体框架、第二摩擦轮、第二变频电机和第二离合机构,所述连接本体框架与纵向随行机构通过第二滑车组连接;所述第二摩擦轮设置于连接本体框架上,且与纵向随行机构滚动接触;所述第二变频电机输出轴与第二摩擦轮固定连接;所述第二离合机构与第二摩擦轮连接。
7、一些实施例中,所述助力机械手包括:操作装置和平衡装置,所述操作装置用于夹持轮胎;所述平衡装置设置于操作装置与移动单元之间,并用于保证操作装置夹持轮胎后的上线平衡。
8、一些实施例中,所述平衡装置包括:底座、套管主机和机械臂,所述底座与移动单元连接;所述套管主机通过连接支架安装于底座上;所述机械臂设置于套管主机底端,所述机械臂与套管主机之间设置有平衡器和气缸本体,所述气缸本体用于驱使机械臂沿套管主机长度延伸方向移动。
9、一些实施例中,所述平衡装置还包括行程挡块,所述行程挡块固定于套管主机上,且位于机械臂移动路径上。
10、一些实施例中,所述操作装置包括:夹具框架、定位夹爪、定位滚轮、夹紧气缸、气动马达和夹紧夹爪,所述夹具框架与平衡装置连接;所述定位夹爪固定于夹具框架上;所述定位滚轮设置于夹具框架上,且与定位夹爪之间形成轮胎夹持空间;所述夹紧气缸与定位滚轮连接,用于驱使定位滚轮移动;所述气动马达安装于夹具框架上;所述夹紧夹爪与气动马达输出轴连接,所述气动马达用于通过夹紧夹爪驱使轮胎转动。
11、一些实施例中,所述操作装置还包括:回转件和光电开关,所述回转件设置于夹具框架与平衡装置之间,且用于驱使夹具框架转动;所述光电开关安装于夹具框架上。
12、本申请实施例提供的技术方案带来的有益效果包括:
13、本申请实施例提供了一种轮胎装配机械手,通过助力机械手夹持轮胎,通过控制单元控制纵向随行机构和横向随行机构带动助力机械手与生产线主线同步形走,能够实现混流线上不同规格轮胎的快速、准确、轻松搬运的工作。
技术特征:
1.一种轮胎装配机械手,其特征在于,其包括:
2.如权利要求1所述的轮胎装配机械手,其特征在于,所述纵向随行机构(2)包括:
3.如权利要求2所述的轮胎装配机械手,其特征在于,所述驱动组件包括:
4.如权利要求1所述的轮胎装配机械手,其特征在于:
5.如权利要求4所述的轮胎装配机械手,其特征在于,所述横向随行机构(3)包括:
6.如权利要求1所述的轮胎装配机械手,其特征在于,所述助力机械手(4)包括:
7.如权利要求6所述的轮胎装配机械手,其特征在于,所述平衡装置(41)包括:
8.如权利要求7所述的轮胎装配机械手,其特征在于:
9.如权利要求6所述的轮胎装配机械手,其特征在于,所述操作装置(42)包括:
10.如权利要求9所述的轮胎装配机械手,其特征在于:所述操作装置(42)还包括:
技术总结
本申请涉及一种轮胎装配机械手,其包括:移动单元、助力机械手和控制单元,移动单元包括轨道机构、纵向随行机构和横向随行机构,纵向随行机构和横向随行机构均与轨道机构相连接;助力机械手与纵向随行机构和横向随行机构相连接,助力机械手上设置有轮胎夹持空间;控制单元与移动单元和助力机械手相连接,以控制纵向随行机构和横向随行机构驱使助力机械手相对于轨道机构移动。本发明中,通过助力机械手夹持轮胎,通过控制单元控制纵向随行机构和横向随行机构带动助力机械手与生产线主线同步形走,能够实现混流线上不同规格轮胎的快速、准确、轻松搬运的工作。
技术研发人员:张秀丽,李凡,刘欣昊,付甲,吴永乐,王少良,杜辉,梁林
受保护的技术使用者:东风华神汽车有限公司
技术研发日:
技术公布日:2024/4/22
- 还没有人留言评论。精彩留言会获得点赞!