一种仿生机器人触觉信息采集装置及其信息处理方法
本发明属于机器人传感,具体涉及一种仿生机器人触觉信息采集装置及其信息处理方法。
背景技术:
1、随着机器人技术的迅猛发展,机器人传感技术备受瞩目。在这一技术领域中,机器人对外部环境和物体特征的触觉感知、处理和转换成为实现机器人高度智能化和灵活性的核心要素。在这样的背景下,触觉信息的采集、提取与编码解码成为实现更精准感知和理解环境的关键步骤。
2、机器人进行抓取、感知等任务时,通常是凭借加载了复杂精细化触觉传感器的机器手爪来完成任务,触觉传感器包括压力、振动等多种传感器,且触觉传感器数量之多,位置分布之广,导致采集的触觉数据多点多段。此外,传统多点多段的触觉数据编码方式通常采用串行、并行传输,存在数据量庞大、传输速度缓慢、信号易损失、不稳定等弊端。与此同时,在包含大量触觉信息的触觉数据的处理中,特征提取方面也是一个至关重要的问题。传统机器人在进行抓取、感知等任务时,通常直接将采集的压力值、振动频率值等作为触觉特征,但这种特征并不直观,且在用于物体分类等机器学习任务中重要特征并不突出。
技术实现思路
1、本发明目的就是为了弥补现有技术的缺陷,提供一种仿生机器人触觉信息采集装置及其信息处理方法。
2、为实现上述技术目的,本发明采用如下技术方案:
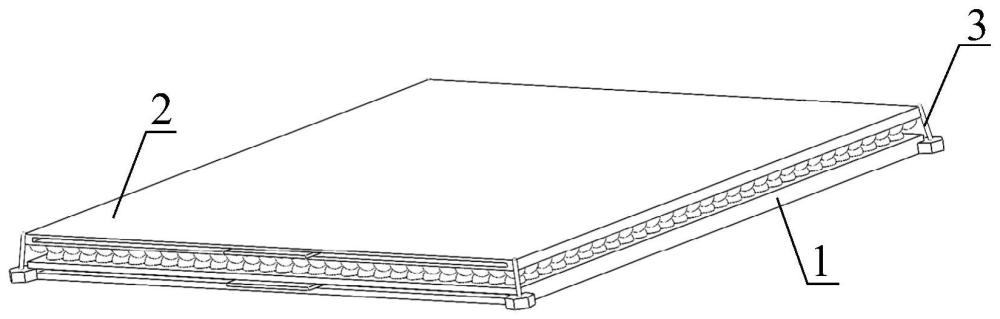
3、一种仿生机器人触觉信息采集装置,包括固定感知层、滑动感知层、柔性连接结构;
4、所述固定感知层,包括柔性间隔层以及柔性凸起结构,所述柔性间隔层内部嵌入第一压力传感器阵列,所述第一压力传感器阵列包括多个力敏单元,所述柔性间隔层上方设有柔性凸起结构;
5、所述滑动感知层包括柔性表面层和柔性反凸起结构,所述柔性表面层位于滑动感知层的最外层,所述柔性表面层内部嵌有第二压力传感器阵列,所述第二压力传感器阵列包括多个力敏单元,所述柔性反凸起结构与下方柔性凸起结构交错吻合;
6、所述固定感知层与滑动感知层通过柔性连接结构连接。
7、所述第一压力传感器阵列和第二压力传感器阵列包括15*15个力敏单元,所述力敏单元为压阻式敏感元件,所述力敏单元按矩阵式分布。
8、所述柔性连接结构位于固定感知层的四个角,连接滑动感知层和固定感知层,所述柔性连接结构具有良好的延展性和弹性,确保滑动感知层在受到非法向力时可以相对固定感知层发生位移,并在力消失时返回初始位置。
9、一种仿生机器人触觉信息采集装置的信息处理方法,包括以下步骤:
10、s1:首先,将已采集的一定时间长度t内的第一压力传感器阵列和第二压力传感器阵列中的每个力敏单元的输出响应分别记为y1(t)(i,j)和y2(t)(i,j),并根据矩阵坐标(i,j)为每个力敏单元分配特定的信号频率ω(i,j)作为其标识符;
11、s2:通过比较第一压力传感器阵列和第二压力传感器阵列的输出响应,确定外力在水平方向上分力与正北方向的夹角α,并为夹角α分配特定的信号频率ωα作为其标识符;
12、s3:基于多正弦信号的合成,将第二压力传感器阵列中的多个力敏单元的输出响应信息及力的方向信息进行正弦信号合成,整合生成一维触觉信号f(t);
13、s4:对所述合成信号进行时频域分析,通过短时傅里叶变换,将一维触觉信号转换为恒频变幅频谱图。
14、与现有的技术相比,本发明的有益效果是:
15、本发明提供的一种仿生机器人触觉信息采集装置,区别于传统的单层、静态的触觉信息采集装置,该装置引入了滑动感知层。该装置利用仅能测量法向力的压力传感器和特定的结构实现了多维力的测量,增加了触觉信息的多样性;
16、本发明提供的一种仿生机器人触觉信息采集装置,力敏单元按矩阵形式分布,使得装置能够同时感知多个点的外部力,有效提升了感知的并行性和综合性。
17、本发明提供的一种仿生机器人触觉信息采集装置的信息处理方法,基于多正弦信号的合成,对信号进行编码生成一维触觉信号。这一编码方式获得了更稳定、更泛化的一维触觉信号,保留了触觉信息的多样性。
18、本发明提供的一种仿生机器人触觉信息采集装置的信息处理方法,通过短时傅里叶变换,将一维触觉信号转换为恒频变幅频谱图。这种转换既能保留信号完整的信息,也保持着信号对于时间的依赖性。同时,触觉信号的重要特征得以突显,为机器人物体感知、抓取等任务后续的触觉信息处理过程提供了一种有效的参考依据。
技术特征:
1.一种仿生机器人触觉信息采集装置,其特征在于,
2.根据权利要求1所述的一种仿生机器人触觉信息采集装置,其特征在于,所述第一压力传感器阵列(12)和第二压力传感器阵列(22)包括15*15个力敏单元,所述力敏单元为压阻式敏感元件,所述力敏单元按矩阵式分布。
3.根据权利要求1所述的一种仿生机器人触觉信息采集装置,其特征在于,所述柔性连接结构(3)位于固定感知层(1)的四个角,连接滑动感知层(2)和固定感知层(1),所述柔性连接结构(3)具有良好的延展性和弹性,确保滑动感知层(2)在受到非法向力时可以相对固定感知层(1)发生位移,并在力消失时返回初始位置。
4.一种仿生机器人触觉信息采集装置的信息处理方法,其利用权利要求1-3任一项所述的一种仿生机器人触觉信息采集装置,其特征在于,包括以下步骤:
技术总结
本发明公开了一种仿生机器人触觉信息采集装置及其信息处理方法。所述装置包括固定感知层、滑动感知层、柔性连接结构。该装置采用多层感知系统的设计,在外力作用下实现相对位移。所述固定感知层包括柔性间隔层以及柔性凸起结构,内部嵌入压力传感器阵列,通过柔性凸起结构实现外力传递至下层传感器阵列。所述滑动感知层包括柔性表面和柔性反凸起结构,内部搭载压力传感器阵列,高效准确地感知外部力的方向和大小。在信息处理方面,本发明基于多正弦信号的合成,编码多组时间序列信号,进一步通过短时傅里叶变换,将一维触觉信号转换为恒频变幅频谱图,提高信息提取的效率。本发明在机器人触觉感知领域有借鉴意义。
技术研发人员:熊一萱,熊鹏文,汪永阳,魏乐天,欧阳建刚,彭欢,韦琦,黄宇轩,吴然皓,何程杰,黄黎明
受保护的技术使用者:南昌大学
技术研发日:
技术公布日:2024/4/22
- 还没有人留言评论。精彩留言会获得点赞!