操作机器人的可自带升降抽屉导轨的分体式地刀吸附装置的制作方法
本发明涉及操作机器人领域,具体涉及操作机器人的可自带升降抽屉导轨的分体式地刀吸附装置。
背景技术:
1、随着机器人技术的兴起, 倒闸操作开始引入机器人进行自动化或者远程操控。利用功能完善,操作灵活的机器人操作倒闸,既能够提高配电开关柜控制精准程度,又可以提高安全操作系数,保障电网企业对社会供电的稳定性,同时保证电网及其设备的安全性,具有重要的作用和意义。
2、但是现有技术的刀闸操作机构虽然也有放置在机器人上进行操作,比如专利号为cn202011460884.0的室内带电操作机器人,整个地刀模块均不可拆卸的安装于机器人本体上,当操作倒闸时,通过机器人本体将地刀模块运输到开关柜现场,完成接地刀闸操作的工作后,又重新回到操作室。此操作过程需要机器人本体有一定的响应时间,且一般机器人本体将地刀模块运输到开关柜现场也需要一定的时长。万一发生紧急事情,比如变电站短路等危险事件,常常来不及接地刀闸操作而导致危险事件的发生。因此采用现有技术的方案,反应时间长,响应时间慢,往往来不及处理突发事件的发生。
3、有鉴于此,本发明提供一种操作机器人的可自带升降抽屉导轨的分体式地刀吸附装置。
技术实现思路
1、本发明的目的在于针对现有技术的不足,提供操作机器人的可自带升降抽屉导轨的分体式地刀吸附装置。
2、为了解决上述技术问题,采用如下技术方案:
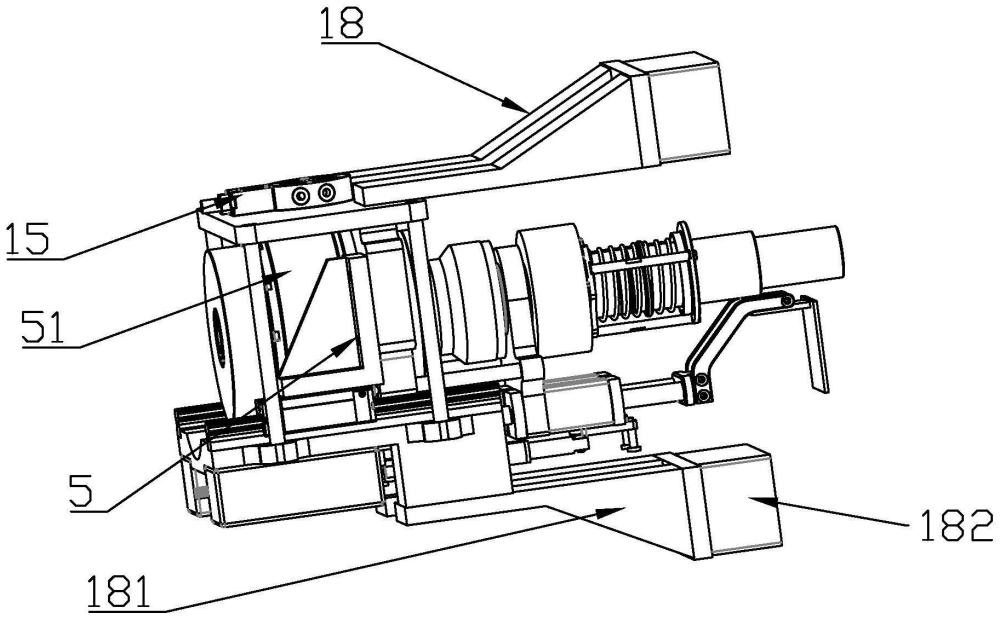
3、操作机器人的可自带升降抽屉导轨的分体式地刀吸附装置,包括机架、地刀模块、机械臂和工具快换组件,所述机械臂固定设置在机架上,所述工具快换组件包括设置于机械臂上的第一芯信号模块和设置于地刀模块上的第二芯信号模块,通过所述第一芯信号模块和第二芯信号模块的快换配合,将所述机械臂的动力传送到所述地刀模块上;
4、所述地刀模块的下部设有升降抽屉导轨装置,所述升降抽屉导轨装置和机架之间设有可分离的连接组件;
5、所述升降抽屉导轨装置包括设置在地刀模块的下部两侧的抽屉滑轨组,所述抽屉滑轨组的上部连接所述地刀模块,所述抽屉滑轨组的下部连接所述连接组件。
6、进一步,所述地刀模块上安装有吸附结构和无线通信模块,所述吸附结构用于将地刀模块吸附于柜门上,所述无线通信模块分别与远程控制系统和操作机器人的控制模块通信连接。
7、进一步,所述吸附结构包括电磁吸附结构,所述电磁吸附结构包括电磁吸附座和电磁块,所述电磁吸附座固定安装于所述地刀模块上,所述电磁吸附座连接有电磁块,所述电磁块作用于柜门。
8、进一步,所述吸附结构包括永磁吸附结构,所述永磁吸附结构包括永磁吸附座和永磁块,所述永磁吸附座固定安装于所述地刀模块上,所述永磁吸附座连接有永磁块,所述永磁块作用于柜门。
9、进一步,所述吸附结构包括吸盘吸附结构,所述吸盘吸附结构包括吸盘吸附座和吸盘块,所述吸盘吸附座固定安装于所述地刀模块上,所述吸盘吸附座连接有吸盘块,所述吸盘块作用于柜门。
10、进一步,所述机架上设有支撑平台,所述支撑平台通过所述连接组件可分离地安装有所述升降抽屉导轨装置和地刀模块。
11、进一步,所述连接组件包括电磁连接组件,所述电磁连接组件包括固定安装于所述抽屉滑轨组底部的电磁铁,所述电磁铁的下部连接支撑平台;
12、当电磁铁通电时,所述升降抽屉导轨装置和地刀模块吸合在支撑平台上。
13、进一步,所述连接组件包括永磁连接组件,所述永磁连接组件包括固定安装于所述抽屉滑轨组底部的永磁铁,所述永磁铁下部连接支撑平台。
14、进一步,所述连接组件包括真空吸盘连接组件,所述真空吸盘连接组件包括固定安装于所述抽屉滑轨组底部的真空吸盘,所述真空吸盘的下部连接支撑平台;
15、当所述真空吸盘通电时,所述真空吸盘吸附住所述升降抽屉导轨装置和地刀模块。
16、进一步,所述抽屉滑轨组包括外侧的定滑轨与内侧的动滑轨,所述定滑轨与动滑轨之间设有滚珠滑动组件;两组内侧的所述动滑轨之间设有第一稳固连接座和第二稳固连接座,所述第一稳固连接座位于所述动滑轨的上部,所述第二稳固连接座位于所述动滑轨的下部。
17、由于采用上述技术方案,具有以下有益效果:
18、本发明为操作机器人的可自带升降抽屉导轨的分体式地刀吸附装置,本发明先通过将整个地刀模块设置成一个独立的模块化产品,整个地刀模块的下部设置有一个升降抽屉导轨装置,并通过连接组件将地刀模块可拆卸地安装于机架上,随时可通过连接组件脱离机架。具体的,可将地刀模块和升降抽屉导轨装置安装于机架的固定的支撑平台上。在使用时,先通过之前采集的电柜数据,将机器人运动至相对柜门较为合适的位置。然后通过第一芯信号模块和第二芯信号模块的快换配合,将所述机械臂的动力传送到所述地刀模块上。然后由机械臂把地刀模块和升降抽屉导轨装置运动,紧跟着将抽屉滑轨组展开,将地刀模块抬升到一定的高度,接着由连接组件将地刀模块、升降抽屉导轨装置与机架分开。与此同时,于此同时,通过连接组件,将地刀模块和机架分开,然后通过机械臂把地刀模块和升降抽屉导轨装置抓取起来,使机械臂抓着地刀模块进行xyz三维空间内的调姿,使地刀模块的地刀浮动头完全对准要配电柜接地刀闸。接着通过吸附结构,将地刀模块吸附于柜门上。然后操作机器人本体可离开柜门,由地刀模块的电源给吸附结构和回转电机供电,这样与远程控制系统和操作机器人的控制模块通过无效通信控制回转电机工作,由回转电机带动地刀操作头旋转,转动接地刀闸,完成配电柜接地刀闸相关操作,实现全程自动化的操作,使机器人完成转动接地刀闸操作。由于本结构可不需要升降结构,也不需要设置如现有技术的xyz方向上的滑动机构,因此地刀模块上相比于传统技术,减少了xy方向的滑动机构,且也不需要单独设置具有驱动电机的升降结构,改用简单的抽屉滑轨组来实现。从而使地刀模块的结构大大减轻,负载至少比原来减轻50%以上,因此本发明的机械臂只需要沿用操作机器人本身的小扭矩机械臂即可完成上述的工作,而不需要因为需要操作地刀模块而更换大扭矩的机械臂。
19、除此之外,所述吸附结构的设置,使浮动操作转动接地刀闸时,由于需要的扭矩很大,通过吸附结构将地刀模块和柜门连接在一起。也可以结合机械臂连接整个机器人,利用机器人本身的质量、以及地刀模块柜门的吸附力共同抵抗转动接地刀闸的扭矩,从而使回转电机带动浮动操作头旋转,进而更好地转动接地刀闸,完成接地刀闸操作。而且由于吸附结构的设置,当完成接地刀闸操作后,通过工具快换组件,使机器人本体和地刀模块完全脱离,使地刀模块随时可脱离机器人本体进行单独作用,比如在机器人的地刀模块完成转动接地转动刀闸的工作后,可直接放置在现场。当需要转动接地刀闸的工作时直接可以使用,不需要机器人本体二次运输到现场,因此可在地刀模块上设置电磁铁、永磁铁或者吸盘等吸附装置,使单独的地刀模块吸附在柜门上,由远程控制系统控制地刀模块进行后续的相关工作,而机器人本体可重新回到工作室,装配好新的地刀模块后可重新开始工作,完成下一个开关柜的接地刀闸操作,方便一机多用,也方便后续的维修和维护,大大地提高了工作效率。另外将地刀模块通过吸附结构直接设置在柜门上,一般可持续工作半个月至一个月(吸附结构不断电的情况下),只要地刀模块上的电池可带动地刀模块的回转电机21、吸附结构等设备工作,理论上就可以不离开开关柜现场。因此当需要进行接地刀闸操作时,通过无线通信模块的信号传输,远程控制系统可直接控制回转电机21完成,响应时间快,工作效率高,能够及时处理应急事情的发生。
- 还没有人留言评论。精彩留言会获得点赞!