基于关节位姿变化的手足仿生机械手抓取控制方法和装置
本发明涉及仿生机器人领域,特别涉及一种基于关节位姿变化的手足仿生机械手抓取控制方法和装置。
背景技术:
1、机器人技术的发展可以对工业生产和日常生活产生明显的积极影响,提高相应领域的工作效率,所以近些年来,机器人技术一直是一项重点研究方向,也是热点研究方向。
2、在机器人研究领域中,机器人的抓取控制更是重中之重。对于这一问题,一种方式是采用传统机器人,传统的机器人抓取方式主要是基于机械臂的运动控制,其抓取能力收到机械长度和结构的限制,对于形状不规则、表面有复杂结构或形态的物体,其住区能力有限,对于待抓取的目标物体限制较多。另一种方式则是采用仿生机器人,仿生机器人作为一种集生物学、工程学于一体的新型机器人系统,基于自然界中的动物形态和运动方式,具有更为优异的抓取控制能力,但当前仿生机器人的抓取控制的控制复杂度过高,实现难度大且精度通常较低,难以精准地抓握物品。
技术实现思路
1、为了解决上述技术问题,本发明提供了一种基于关节位姿变化的手足仿生机械手抓取控制方法和相应的基于关节位姿变化的手足仿生机械手抓取控制装置、计算设备和计算机存储介质。
2、根据本发明的一个方面,提供了一种基于关节位姿变化的手足仿生机械手抓取控制方法,所述方法包括:
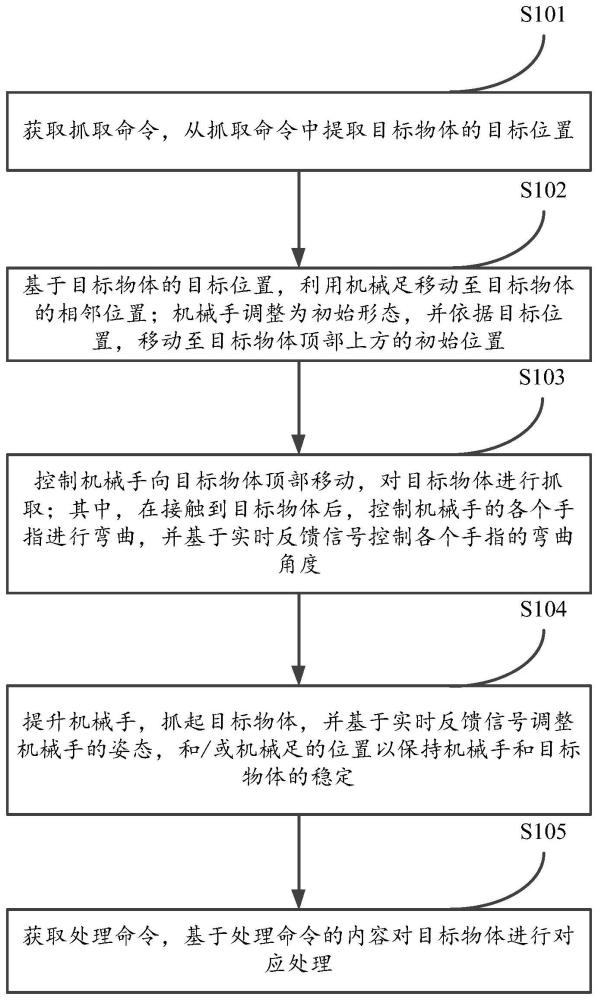
3、获取抓取命令,从抓取命令中提取目标物体的目标位置;
4、基于目标物体的目标位置,利用机械足移动至目标物体的相邻位置;机械手调整为初始形态,并依据目标位置,移动至目标物体顶部上方的初始位置;
5、控制机械手向目标物体顶部移动,对目标物体进行抓取;其中,在接触到目标物体后,控制机械手的各个手指进行弯曲,并基于实时反馈信号控制各个手指的弯曲角度;
6、提升机械手,抓起目标物体,并基于实时反馈信号调整机械手的姿态,和/或机械足的位置以保持机械手和目标物体的稳定;
7、获取处理命令,基于处理命令的内容对目标物体进行对应处理。
8、上述方案中,所述目标物体的目标位置为基于目标物体和机械手生成的三维坐标系中的坐标。
9、上述方案中,所述基于目标物体的目标位置,利用机械足移动至目标物体的相邻位置;机械手调整为初始形态,并依据目标位置,移动至目标物体顶部上方的初始位置,进一步包括:
10、目标位置和相邻位置之间的距离为相邻距离;当相邻距离小于机械手的伸展长度时,机械足停止移动;
11、初始状态为机械手的手掌为水平,且各个手指保持伸直状态;
12、目标位置与初始位置之间的距离为初始距离;初始距离小于预设距离,当机械手移动至初始位置时暂停移动。
13、上述方案中,所述实时反馈信号至少包括:机械手上各个压力传感器采集的压力信号、各个旋转传感器采集的旋转信号以及各个电机的电压和转速;
14、所述控制机械手向目标物体顶部移动,对目标物体进行抓取;其中,在接触到目标物体后,控制机械手的各个手指进行弯曲,并基于实时反馈信号控制各个手指的弯曲角度,进一步包括:
15、基于旋转传感器采集的旋转信号,确定当前机械手的姿态,并绘制出姿态图;
16、在机械手接触到目标物体后,基于压力传感器采集的压力信号获取当前压力值,若任一压力传感器的当前压力值小于第一压力阈值,则保持对应电机的电压和转速,使对应指节继续弯曲;若任一压力传感器的当前压力值不小于第一压力阈值且小于第二压力阈值,则降低对应电机的电压和转速,使对应指节的弯曲速度减慢;若任一压力传感器的当前压力值不小于第二压力阈值,则将对应电机的电压和转速均降为0,停止对应指节的弯曲。
17、上述方案中,所述提升机械手,抓起目标物体,并基于实时反馈信号调整机械手的姿态,进一步包括:
18、在提升机械手的过程中,判断是否存在任一压力传感器的当前压力值大于第三压力阈值,若有,则旋转机械手使目标物体位于手掌的上方。
19、上述方案中,所述提升机械手,抓起目标物体,并基于实时反馈信号调整机械手的姿态,和/或机械足的位置以保持机械手和目标物体的稳定,进一步包括:
20、实时反馈信号中还包括振动传感器采集的振动信号;
21、在提升机械手的过程中,根据振动信号判断机械手是否出现不同于运行方向的振动,若有,则旋转机械手使目标物体位于手掌的上方;和/或,
22、调整机械足的位置,使机械手的水平坐标位于机械足的水平坐标的范围内。
23、上述方案中,所述方法还包括:
24、在机械手上设置摄像头,在抓取目标物体前获取目标物体的目标图像;
25、根据目标图像,确定目标物体的外观形状,判断目标物体是否能够被机械手从上方完成抓取;
26、若是,则继续抓取操作;
27、若否,则旋转机械手使其手掌向上,从目标物体下方或侧下方进行抓取操作。
28、根据本发明的另一方面,提供了一种基于关节位姿变化的手足仿生机械手抓取控制装置,包括:获取模块、初始化模块、抓取模块、调整模块以及处理模块;其中,
29、所述获取模块,用于获取抓取命令,从抓取命令中提取目标物体的目标位置;
30、所述初始化模块,用于基于目标物体的目标位置,利用机械足移动至目标物体的相邻位置;机械手调整为初始形态,并依据目标位置,移动至目标物体顶部上方的初始位置;
31、所述抓取模块,用于控制机械手向目标物体顶部移动,对目标物体进行抓取;其中,在接触到目标物体后,控制机械手的各个手指进行弯曲,并基于实时反馈信号控制各个手指的弯曲角度;
32、所述调整模块,用于提升机械手,抓起目标物体,并基于实时反馈信号调整机械手的姿态,和/或机械足的位置以保持机械手和目标物体的稳定;
33、所述处理模块,用于获取处理命令,基于处理命令的内容对目标物体进行对应处理。
34、根据本发明的又一方面,提供了一种计算设备,包括:处理器、存储器、通信接口和通信总线,所述处理器、所述存储器和所述通信接口通过所述通信总线完成相互间的通信;
35、所述存储器用于存放至少一可执行指令,所述可执行指令使所述处理器执行如上述的基于关节位姿变化的手足仿生机械手抓取控制方法对应的操作。
36、根据本发明的再一方面,提供了一种计算机存储介质,所述存储介质中存储有至少一可执行指令,所述可执行指令使处理器执行如上述的基于关节位姿变化的手足仿生机械手抓取控制方法对应的操作。
37、根据本发明提供的技术方案,获取抓取命令,从抓取命令中提取目标物体的目标位置;基于目标物体的目标位置,利用机械足移动至目标物体的相邻位置;机械手调整为初始形态,并依据目标位置,移动至目标物体顶部上方的初始位置;控制机械手向目标物体顶部移动,对目标物体进行抓取;其中,在接触到目标物体后,控制机械手的各个手指进行弯曲,并基于实时反馈信号控制各个手指的弯曲角度;提升机械手,抓起目标物体,并基于实时反馈信号调整机械手的姿态,和/或机械足的位置以保持机械手和目标物体的稳定;获取处理命令,基于处理命令的内容对目标物体进行对应处理。通过在机械手移动至目标物品附近后的抓取过程中获取机械手上压力传感器采集到的压力信号和角度传感器采集到的角度信号,实时感知机械手对物体的抓取力度,调整机械手各个手指的弯曲角度,并在符合条件时及时停止,以较为简洁的控制方式,科学、精确且灵活地对机械手的抓取位置和姿态进行调整控制,可以使机械手与目标物体更为贴合,抓取更为牢固,实现对各种形状和尺寸的物体进行有效抓取,并保持了适当力度,有效地防止了在抓取过程中划伤、压伤目标物品,充分扩展了机械手在工业生产和日常生活中的使用场景。同时,在完成抓取后的提升、移动过程中,通过机械手和机械足的配合,保证了运行过程的稳定,大大降低了在抓取目标物品后,在后续处理中出现物品掉落的风险。
38、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
39、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!