一种球形张拉整体机器人及其驱动方法
本发明涉及柔性机器人,尤其涉及一种球形张拉整体机器人及其驱动方法。
背景技术:
1、随着自动化与人工智能技术的快速发展,机器人已被广泛应用于深空及着落探测领域。目前大多探测机器人为传统的刚性结构,如轮式、足式机器人等,其主要被应用于外星地表行走。近年来,柔性机器人逐渐成为研究热点,张拉整体作为其中一种的柔性结构也被逐步应用至机器人领域。张拉结构由刚性杆和柔性绳耦合而成,其中杆单元只承受压力,而绳单元只承受拉力,两种力在空间内相互平衡而使结构稳定。与传统的刚性机器人相比,张拉整体机器人具有高强度质量比、缓冲性能强、地形适应力强等优点。
2、六杆球形张拉整体机器人是一种高度对称的机器人构型,在目前多数研究中,通常采用改变其绳长来改变机器人的质心位置的方法来实现翻滚运动。然而,现有六杆球形张拉整体机器人的固有构型中存在着24根应绳,为达到向任意方向翻滚的目的,所有的应绳均可收缩,即所有的绳均可安装驱动器。由此产生的一系列问题有:1)驱动数目过多导致制造困难;同时也给驱动策略的寻找增加难度;2)刚性的杆构件抗冲击性能较差、易损坏;3)机器人的质量较大、能耗高、翻滚效率低下。因而,找寻更优良的驱动方式至关重要。
技术实现思路
1、本发明提供一种球形张拉整体机器人及其驱动方法,用以解决现有技术中因驱动数目大导致的驱动策略寻找困难的缺陷。
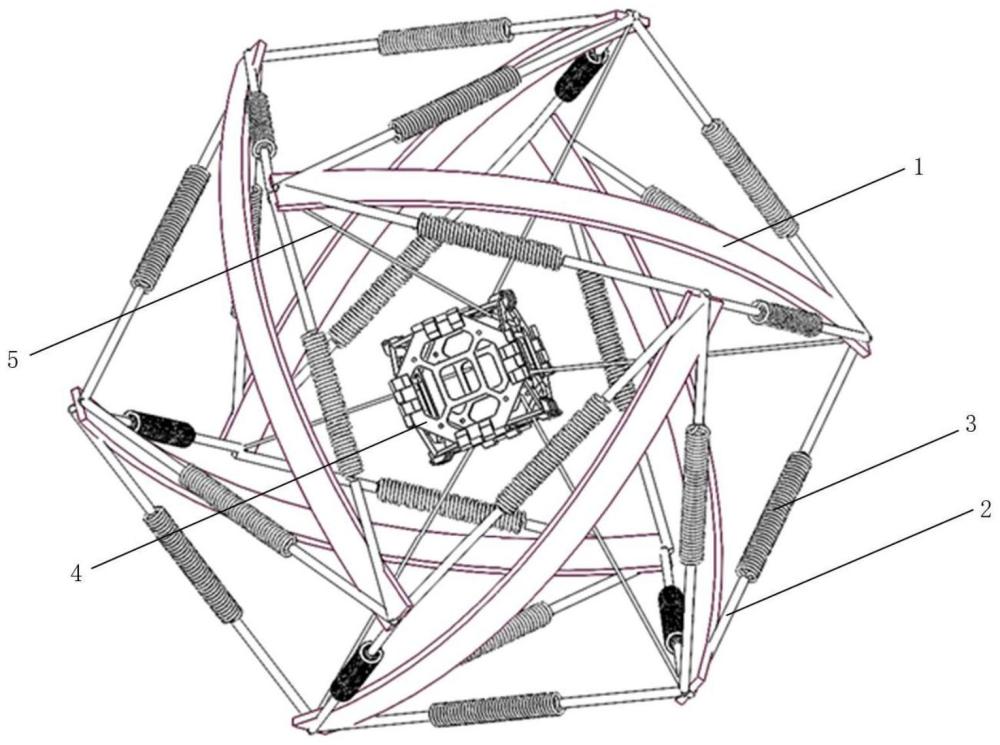
2、一种球形张拉整体机器人,包括:六个驱动杆、尼龙绳、拉簧、中心控制盒、连接绳;
3、所述六个驱动杆两两相互平行且对称,互相平行的两根驱动杆为一组,共构成三组杆单元;该三组杆单元均匀分布在两两互相垂直并对称的三个平面上,且所有驱动杆的节点均匀地分布在同一个球面上;
4、在每个驱动杆的两个节点之间连接有电机、pla材料绳;
5、在每两个驱动杆之间的节点之间,连接有由所述尼龙绳与拉簧共同构成的绳结构;
6、所述中心控制盒位于机器人节点球面的球心位置;在所述中心控制盒内设置有用于控制所述电机的单片机控制器与测量节点位置的激光跟踪仪;
7、所述连接绳共有十二根,每根所述连接绳一端连接所述中心控制盒,另一端连接至每个驱动杆的两个端部。
8、进一步地,如上所述的球形张拉整体机器人,所述pla材料绳包括2根,所述电机分别与2根pla材料绳的其中一个端点固定连接,所述2根pla材料绳的另一端分别固定在所述驱动杆的两个端点上。
9、进一步地,如上所述的球形张拉整体机器人,在每个驱动杆的两个节点之间连接有2个所述电机、一根所述pla材料绳;
10、所述2个电机分别固定在每个驱动杆的两个节点上,所述pla材料绳固定在2个电机之间。
11、进一步地,如上所述的球形张拉整体机器人,所述连接绳的另一端固定在所述电机的上端盖的尾部。
12、进一步地,如上所述的球形张拉整体机器人,所述绳结构包括:两根所述尼龙绳和一个所述拉簧;
13、每根所述尼龙绳的一端与所述拉簧连接,其另一端与电机的上端盖的尾部缠绕紧固。
14、一种球形张拉整体机器人的驱动方法,包括以下步骤:
15、步骤1:利用激光跟踪仪实时测量所述球形张拉整体机器人所有节点的空间位置;
16、步骤2:根据所述所有节点的空间位置,确定与地面接触的初始着地三节点;
17、步骤3:根据所述初始着地三节点与目标点的位置关系,确定结束着地三节点;并根据所述初始着地三节点与所述结束着地三节点,确定翻滚轴;
18、步骤4:根据所述翻滚轴,通过中心控制盒驱动电机,赋予驱动杆具体的驱动量,最终实现驱动杆的收缩从而使机器人以所述翻滚轴进行翻滚;
19、步骤5:反复执行步骤1-步骤4,直到所述球形张拉整体机器人翻滚到所述目标点为止。
20、进一步地,如上所述的球形张拉整体机器人的驱动方法,所述根据所述翻滚轴,通过中心控制盒驱动电机,赋予驱动杆具体的驱动量包括:
21、步骤①:以机器人的所有驱动杆为非压缩状态为初始状态,首先通过中心控制盒驱动某一电机,通过该电机使与其对应的驱动杆处于给定的收缩量,并记录在该给定收缩量下对应的启发式函数s(i),其中i∈[1,m];所述的启发式函数s(i)为:将着地三角形的一条边定为机器人翻滚的转动轴,机器人的质心投影与该转动轴的距离为所述启发式函数s(i);当机器人的质心位于着地三角形的外部,则定义启发式函数为负,否则为正;
22、步骤②:通过中心控制盒驱动该电机,将该收缩的驱动杆驱动器恢复至初始状态,然后通过中心控制盒驱动另一电机,并通过该另一电机使与其对应的驱动杆处于所述给定的收缩量,并记录在该给定的收缩量下对应的启发式函数s(i);
23、步骤③:重复执行步骤②,以获取所有驱动杆分别对应的启发式函数s(i);并从所有的启发式函数s(i)中选择启发值最小对应的驱动杆,并保持该启发值最小对应的驱动杆处于所述给定的收缩量;
24、步骤④:对未进行收缩的m-1个驱动杆依次按照步骤①-③的方式进行收缩,直到所述启发式值s(i)小于或等于0,以最后所有处收缩状态的驱动杆实现机器人的翻滚。
25、本发明提供的球形张拉整体机器人及其驱动方法,根据张拉整体自身的结构特点,采用杆件屈曲的方式来实现机器人的翻滚运动。由此所有的驱动器将安装于杆上,因球形张拉整体机器人仅有6个杆,故驱动器的数目也相应的变为6个,驱动数目大大降低。通过找寻机器人各步态的驱动策略并计算目标点与机器人质心的关系来完成机器人向任意目标点的定向运动。本发明将pla材料绳与柔性杆进行连接,通过电机拉伸绳来达到柔性杆件屈曲的目的,通过激光跟踪仪的位置实时测量对机器人进行闭环控制,实现向任意目标点的精确行走。相对于传统的绳驱动方法,使用本发明方法制造的张拉整体机器人有着以下优势:1)重量轻,易于制造;2)驱动数目少,驱动策略寻找更加快速;3)整体结构刚度更低,抗冲击性能良好;4)能耗低,翻滚效率提升。本发明将贪心搜索算法应用至杆件驱动策略的寻找,设计了只考虑二元状态的搜索过程。在保证策略有效的情况下,提高了算法的计算效率,为机器人的定点行走创造了有利条件。
技术特征:
1.一种球形张拉整体机器人,其特征在于,包括:六个驱动杆(1)、尼龙绳(2)、拉簧(3)、中心控制盒(4)、连接绳(5);
2.根据权利要求1所述的球形张拉整体机器人,其特征在于,所述pla材料绳(9)包括2根,所述电机(8)分别与2根pla材料绳(9)的其中一个端点固定连接,所述2根pla材料绳(9)的另一端分别固定在所述驱动杆(1)的两个端点上。
3.根据权利要求1所述的球形张拉整体机器人,其特征在于,在每个驱动杆(1)的两个节点之间连接有2个所述电机(8)、一根所述pla材料绳(9);
4.根据权利要求3所述的球形张拉整体机器人,其特征在于,所述连接绳(5)的另一端固定在所述电机(8)的上端盖(11)的尾部。
5.根据权利要求1所述的球形张拉整体机器人,其特征在于,所述绳结构包括:两根所述尼龙绳(2)和一个所述拉簧(3);
6.一种权利要求1-5任一所述球形张拉整体机器人的驱动方法,其特征在于,包括以下步骤:
7.根据权利要求6所述的球形张拉整体机器人的驱动方法,所述根据所述翻滚轴,通过中心控制盒(4)驱动电机(8),赋予驱动杆(1)具体的驱动量包括:
技术总结
本发明提供一种球形张拉整体机器人及其驱动方法。该机器人包括:六个驱动杆、尼龙绳、拉簧、中心控制盒、连接绳;六个驱动杆两两相互平行且对称,且所有驱动杆的节点均匀地分布在同一个球面上;在每个驱动杆的两个节点之间连接有电机、PLA材料绳;在每两个驱动杆之间的节点之间,连接有由尼龙绳与拉簧共同构成的绳结构;中心控制盒位于机器人节点球面的球心位置;每根连接绳一端连接所述中心控制盒,另一端连接至每个驱动杆的两个端部。本发明机器人降低了传统六杆球形张拉整体机器人的整体质量并翻滚效率更高。
技术研发人员:张亮,姚江华,葛艺芃,张幸,张顺
受保护的技术使用者:重庆大学
技术研发日:
技术公布日:2024/5/9
- 还没有人留言评论。精彩留言会获得点赞!