一种基于无人艇的水下装备收放系统的制作方法
本发明涉及无人艇用起吊设备领域,具体涉及一种基于无人艇的水下装备收放系统。
背景技术:
1、在目前的海洋调查和勘测和环境监测与保护中,经常需要使用水下装备对海底环境进行检测,而目前大部分的水下装备收放过程中,都采用无人艇配合收放设备的组合,而无人艇在对装备进行回收时,需要保证收放装置的固定效果。
2、在现有技术中,授权公开号为cn113247216b的中国发明公开了一种无人水下航行器用抓取释放装置,其采用框架式结构对水下物品夹持和收放,但是因为水下装备都是需要长期在水下环境中进行检测,长时间水下环境中,装备外部会附着有不同的水藻、砂石等,造成表面光滑,且在海水的腐蚀和水下杂质的冲刷下,壳体外部也会形成不同的凹凸结构,在对其进行收回时,应当先将表面造成光滑的外界因素消除,才能保证在起吊过程不会发生打滑的现象,从而保证起吊过程的安全性。
技术实现思路
1、本发明提供一种基于无人艇的水下装备收放系统,以解决在对水下装备进行回收时因为表面附着有水藻砂石等杂质造成夹持不牢造成后期移动过程引发意外的技术问题。
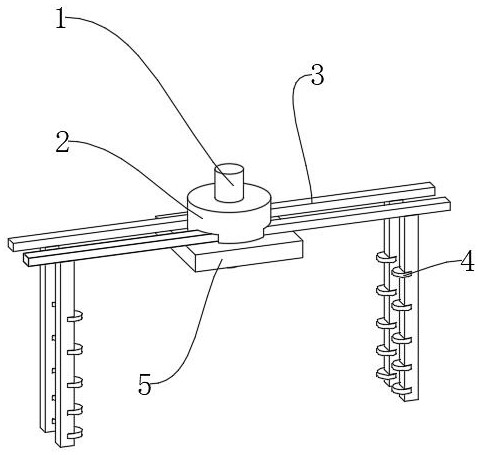
2、本发明的一种基于无人艇的水下装备收放系统采用如下技术方案:包括用于起吊传输的连杆和用于对水下装备进行夹持固定的夹持机构、夹紧机构,连杆底部安装有动力机构,夹持机构分布在动力机构两侧,夹紧机构安装在夹持机构底部,动力机构底部安装有用于影像传导的复位机构;
3、夹持机构包括电动伸缩件,电动伸缩件通过设置在动力机构内部的动力组件控制开合,电动伸缩件外侧底部固定连接有竖杆,若干个夹紧机构竖向均匀分布在竖杆的内侧面;
4、夹紧机构包括夹持轮,夹持轮轴心贯穿设置有主轴,夹持轮通过偏转组件连接主轴,夹持轮外表成型有摩擦纹。
5、进一步的,电动伸缩件转动连接动力机构,电动伸缩件分为合拢状态和夹持状态,且两个状态之间的开合角度为15度,利用开合角度,扩大覆盖范围,从而提高后期夹持时的稳定性。
6、进一步的,夹持轮的偏转组件包括内筒、夹紧弹簧、挤压杆,夹持轮转动连接内筒,夹持轮内侧面均匀分布有四个挤压杆,挤压杆贯穿内筒,且内筒对应挤压杆位置成型有锁紧槽,主轴转动连接内筒。
7、进一步的,内筒内部设置有夹紧弹簧,夹紧弹簧缠绕在位于内筒内部的主轴上,位于内筒内部的主轴上固定连接有第一限位环,内筒内部下侧设置有第二限位环,且内筒内部上侧设置有第三限位环,夹紧弹簧上端与第一限位环固定,夹紧弹簧下端与第二限位环固定,第三限位环设置在第一限位环上侧。
8、进一步的,夹持轮俯视截面呈螺旋状,且沿顺时针方向直径逐渐增大,利用逐渐增大的直径,可以对内侧需要夹紧的水下装备外表面进行适应性的调节以及利用逐渐增大的尺寸可以对水下装备的外侧进行打磨,从而去除水藻、砂石、浮游生物等。
9、进一步的,夹持轮顶部设置有倒角,且夹持轮平面与倒角过渡部分为圆弧状,利用圆弧过渡,倒角位置距离中心距离大于平面距离中心的距离,从而保证在翻转后进一步对内侧的水下装备提高夹持效果。
10、进一步的,夹持轮材质为铜,利用铜可以防锈。
11、进一步的,第一限位环与第三限位环对应的端面上均成型有摩擦纹,利用摩擦纹增大摩擦效果,从而保证第一限位环与第三限位环的限位效果。
12、进一步的,夹持轮的摆动角度为15度。
13、进一步的,锁紧槽呈上下对称结构,且锁紧槽中心部分尺寸大于上下顶端部分,锁紧槽上下收缩部分成型有固定挤压杆的缺口。
14、本发明的有益效果是:本发明的利用偏转组件控制夹持轮的翻转和旋转,在通过机械臂控制装置进行收放时,利用对装置的控制,使夹持轮在对水下装备进行夹持固定前对其表面进行清理,并且能够根据表面腐蚀后的不同凹凸程度进行适应性的配合,再通过夹起移动时瞬间的反作用力对使夹持轮翻转后达到锁紧的效果,从而保证后期夹起过程的安全性,以此来保证装置本身环境适应性和实用性。
技术特征:
1.一种基于无人艇的水下装备收放系统,其特征在于:包括用于起吊传输的连杆(1)和用于对水下装备进行夹持固定的夹持机构(3)、夹紧机构(4),所述连杆(1)底部安装有动力机构(2),所述夹持机构(3)分布在所述动力机构(2)两侧,所述夹紧机构(4)安装在所述夹持机构(3)底部,所述动力机构(2)底部安装有用于影像传导的复位机构(5);
2.根据权利要求1所述的一种基于无人艇的水下装备收放系统,其特征在于:所述电动伸缩件(31)转动连接所述动力机构(2),所述电动伸缩件(31)分为合拢状态和夹持状态,且两个状态之间的开合角度为15度。
3.根据权利要求1所述的一种基于无人艇的水下装备收放系统,其特征在于:所述夹持轮(41)俯视截面呈螺旋状,且沿顺时针方向直径逐渐增大。
4.根据权利要求1所述的一种基于无人艇的水下装备收放系统,其特征在于:所述夹持轮(41)顶部设置有倒角,且所述夹持轮(41)平面与倒角过渡部分为圆弧状。
5.根据权利要求4所述的一种基于无人艇的水下装备收放系统,其特征在于:所述夹持轮(41)材质为铜。
6.根据权利要求1所述的一种基于无人艇的水下装备收放系统,其特征在于:所述第一限位环(441)与所述第三限位环(443)对应的端面上均成型有摩擦纹。
7.根据权利要求1所述的一种基于无人艇的水下装备收放系统,其特征在于:所述夹持轮(41)的摆动角度为15度。
8.根据权利要求7所述的一种基于无人艇的水下装备收放系统,其特征在于:所述锁紧槽(46)呈上下对称结构,且所述锁紧槽(46)中心部分尺寸大于上下顶端部分,所述锁紧槽(46)上下收缩部分成型有固定所述挤压杆(45)的缺口。
技术总结
本发明涉及一种基于无人艇的水下装备收放系统,包括用于起吊传输的连杆和用于对水下装备进行夹持固定的夹持机构、夹紧机构,连杆底部安装有动力机构,夹持机构分布在动力机构两侧,夹紧机构安装在夹持机构底部,动力机构底部安装有用于影像传导的复位机构,用以解决在对水下装备进行回收时因为表面附着有水藻砂石等杂质造成夹持不牢造成后期移动过程引发意外的技术问题。
技术研发人员:吴真真,王和锋,袁超,林叶蕊,谢宗琳,刘建峰
受保护的技术使用者:国家海洋局珠海海洋环境监测中心站
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!