一种隧道机械设备动态监测机器人的制作方法
本发明涉及隧道监测机器人,具体涉及一种隧道机械设备动态监测机器人。
背景技术:
1、隧道工程中,隧道内机械设备众多,这些设备对于隧道的正常运行至关重要。然而,对这些设备进行定期巡检是一项非常繁琐且耗费人力物力的任务。传统的方法是派遣人员进入隧道进行巡检,但这种方式不仅效率低下,而且存在安全隐患。巡检人员需要面对隧道内恶劣的工作环境,如狭窄的空间、噪音、灰尘等,这不仅给工作人员带来不便,而且浪费了大量的人力和物力资源。此外,人工巡检还可能受到人为因素的影响,如漏检、误检等,从而影响到隧道的安全运行。
技术实现思路
1、本发明实施例提供了一种隧道机械设备动态监测机器人,该巡检机器人上设置了实时探测模块和主动探测模块,能够精准地探测并采集隧道内部机械设备的异常数据,还包括巡航模块,该模块包括电磁轮胎和激光测距模块,使巡检机器人能够在隧道的侧壁和顶部稳定行驶,这一设计确保了巡检机器人能够全面覆盖隧道的内部空间,实现对所有机械设备的无死角探查,数据挖掘单元在巡检机器人中发挥着核心作用,它对采集的异常数据进行深入挖掘,并构建预测模型,基于这些模型,数据评估单元对实时数据进行评估判断,快速识别潜在的设备故障或异常状况,此外,通过无线通讯单元,机器人的探测结果能够实时发送给上位终端,这使得操作人员能够远程监控隧道的机械设备状态,为后续的检修工作提供准确依据,与现有的人工巡检方式相比,本发明实施例的巡检机器人解决了恶劣环境下工作人员的不便,以及人为因素导致的漏检、误检问题,它显著提高了隧道巡检的效率和准确性,为保障隧道的安全运行提供了有力支持。
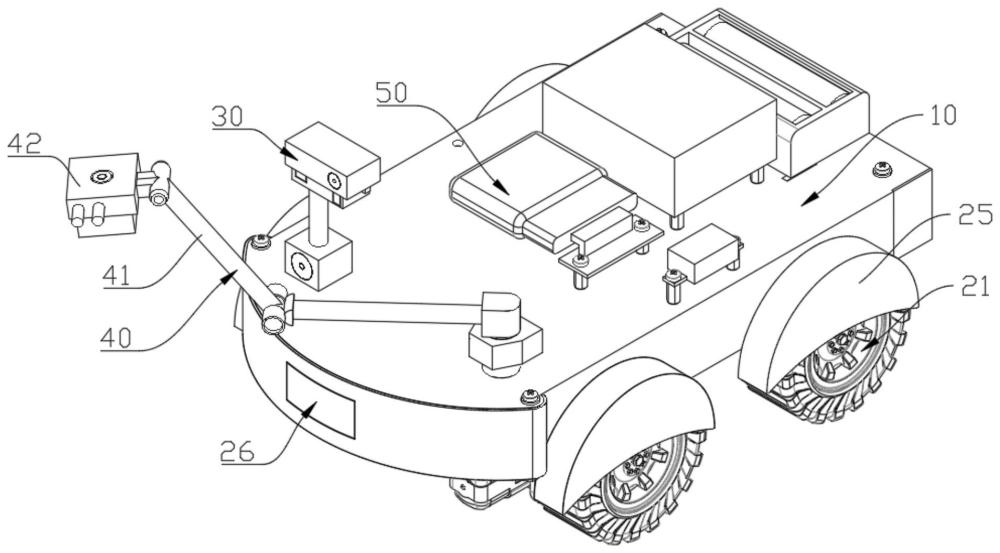
2、一种隧道机械设备动态监测机器人,包括巡检机器人,包括:
3、轨道,所述轨道设置在隧道顶部靠近相关机械设备处,所述轨道间隔设置有分支轨道沿隧道侧壁延伸至底面;
4、巡航模块,包括设置在所述巡检机器人前侧的激光测距模块,所述激光测距模块测量与障碍物之间的距离并生成数字地图,为所述巡检机器人提供路径规划,所述巡检机器人的轮胎为电磁轮胎,所述电磁轮胎与所述轨道磁力吸引;
5、实时探测模块,设置于所述巡检机器人的顶部,其用于获取隧道内部环境、图像、声音数据;
6、主动探测模块,包括设置在所述巡检机器人的顶部前侧的机械臂,所述机械臂的端部设置有检测传感器,所述检测传感器用于采集相关设备的检测数据;
7、集成处理模块,与所述巡航模块、所述实时探测模块、所述主动探测模块通信连接,为其提供数据分析和控制功能;
8、无线通讯单元,与所述集成处理模块通信连接,用于将所述集成处理模块与上位终端建立远程连接,实时查看隧道内部机械设备的情况。
9、进一步的,所述电磁轮胎包括沿轮轴周向等分设置的轮骨,任意所述轮骨之间设置有橡胶,任意所述橡胶与所述轮轴之间设置有支撑架,相邻两个所述支撑架之间为空腔,所述空腔内部设置有电磁铁,所述轮骨与所述电磁铁抵触。
10、进一步的,所述电磁轮胎上设置有plc控制器和方向感知单元,所述方向感知单元的信号输出端与所述plc控制器的信号输入端通信连接,所述plc控制器的信号输出端与所述电磁铁的信号输入端通信连接。
11、进一步的,所述电磁轮胎的顶部设置有用于包裹所述电磁轮胎的电磁屏蔽罩,所述电磁屏蔽罩的材料为铁、镍、钴其中任意一种或至少任意两种组成的合金。
12、进一步的,所述巡航模块包括激光发射单元和与其配套的激光接收器,所述激光发射单元用于发射激光,碰到障碍物后反射回来被所述激光接收器接收,进而计算出与障碍物之间的距离,还包括数据补偿单元,其用于对激光测距数据进行修正和补偿。
13、进一步的,所述实时探测模块包括:
14、声音检测单元,其用于对隧道内部的异常声音采集;
15、图像检测单元,其用于对隧道内部的异常图像采集,如电火花、机械设备挤压变形;
16、环境检测单元,其用于对隧道内部环境进行采集,如灰尘、温度、风速、湿度。
17、进一步的,所述集成处理模块包括:
18、路径规划单元,依据所述激光测距模块的数据生成路径规划,同时在需要攀爬隧道顶部时,提供电磁轮胎控制指令;
19、数据挖掘单元,对所述实时探测模块和所述主动探测模块采集的数据进行挖掘,发现数据中的模式、趋势和关联性,并构建预测模型;
20、数据评估单元,基于所述预测模型对检测数据进行评估判断;
21、数据存储单元,其用于对采集的机械设备检测数据、路径数据、所述预测模型和其他数据进行存储。
22、进一步的,所述路径规划单元具体包括以下步骤:
23、s1,所述激光发射单元发射激光束,碰到障碍物并反射被所述激光接收器接收,获取所述巡检机器人与所述障碍物之间的距离;
24、s2,所述数据补偿单元对s1中测距数据进行修正和补充,提高精度和稳定性;
25、s3,将数据传输给所述路径规划单元,并生成初始数字地图;
26、s4,所述巡检机器人基于所述初始数字地图循环巡检;
27、s5,所述实时探测模块检测到的数据通过所述数据评估单元进行评估;
28、s6,评估为异常数据后,构建路径规划,控制所述巡检机器人前往异常位置;
29、s7,方向感知单元判断所述巡检机器人在隧道侧壁或者顶上时,通过所述plc控制器实时控制距离所述轨道最近的电磁铁连通。
30、进一步的,所述数据挖掘单元包括:
31、数据清洗,对原始数据进行预处理,包括去除重复数据,处理缺失值,消除异常值,以及数据的归一化处理;
32、数据探索,其用于对检测数据进行可视化分析,寻找数据的规律和趋势;
33、特征工程,其用于从原始数据中提取出有意义的属性,然后从大量特征中选择出对模型贡献最大的特征,最后通过组合已有特征构造出新的特征;
34、模型构建,根据提取的特征和决策树算法,构建所述预测模型;
35、模型评估,使用验证集或测试集对模型进行评估,包括准确率、召回率、f1分数指标,根据评估结果,对模型进行调整和优化。
36、本发明实施例提供的上述技术方案的有益效果至少包括:
37、1、通过激光测距模块,为巡检机器人构建了精确的数字地图,为其在隧道内的导航提供了可靠依据,同时,隧道顶部设置了轨道,而巡检机器人配备了磁吸轮胎,这种磁吸轮胎利用磁力与轨道的相互作用,确保巡检机器人在隧道侧壁和顶部稳定行驶,路径规划单元作为巡检机器人的核心部分,使巡检机器人能够根据预设路径自动巡检,释放了人工劳动力,极大地提高了巡检的效率;
38、2、巡检机器人的顶部设置设置有实时探测模块和主动探测模块,通过实时探测模块获取隧道内部的多维度数据,包括环境、图像和声音,然后将这些数据发送至集成处理模块进行分析和规划,集成处理模块根据异常数据的性质和严重程度生成临时路径规划引导巡检机器人主动探查异常区域,进一步的,集成处理模块控制主动探测模块上的机械臂,使机械臂上的检测传感器靠近相关机械设备采集异常数据,该模式显著提高了巡检的实时性和准确性;
39、3、数据挖掘单元对实时探测模块和主动探测模块采集的大量数据进行深入挖掘,准确发现数据中的模式、趋势和关联性,基于这些分析,数据挖掘单元构建相关的预测模型,为后续的机械设备数据评估提供有力支持,通过实时数据评估,巡检机器人能够迅速识别异常情况,确保了数据的实时性和准确性,这种实时监控能力增强了巡检的效率和准确性,降低了人工判断和检修的复杂度,并通过无线通讯单元实时发送至上位终端,便于操作人员远程监控巡检机器人的工作状态和隧道内机械设备的状况,为隧道的维护和管理提供了有力支持。
40、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
41、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!