一种适用于工业机器人的检测装置的制作方法
本申请涉及检测设备,尤其涉及一种适用于工业机器人的检测装置。
背景技术:
1、工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。工业机器人被广泛应用于电子、物流、化工等各个工业领域之中。一般来说,工业机器人由三大部分六个子系统组成。三大部分是机械部分、传感部分和控制部分。六个子系统可分为机械结构系统、驱动系统、感知系统、机器人-环境交互系统、人机交互系统和控制系统。在现实生活中,需要对生产出的产品的平整度进行检测作业,以确保产品后续的使用。
2、但是在对生产的工件进行检测时,不便于快速对工件进行固定,容易导致工件在检测的过程中出现移动,导致检测结果出现异常。
技术实现思路
1、本申请实施例提供了一种适用于工业机器人的检测装置,用以解决在对生产的工件进行检测时,能够快速对工件进行固定的问题。
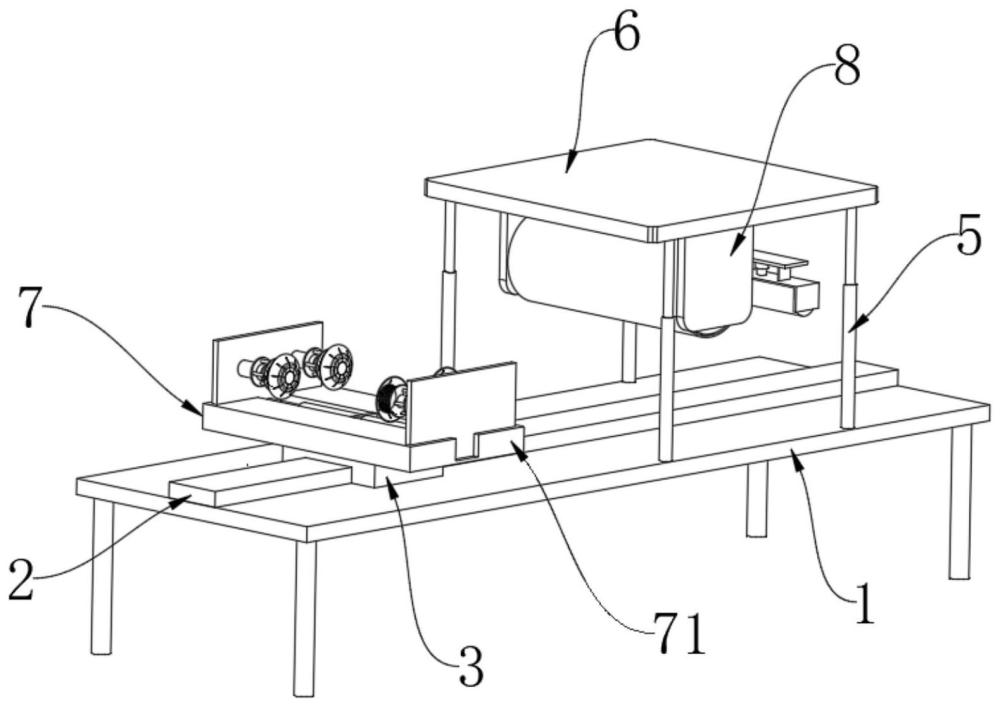
2、本申请实施例提供了一种适用于工业机器人的检测装置,包括工作台,所述工作台的顶部中心处固定安装有导轨,所述导轨的顶部滑动连接有驱动器,所述工作台的顶部边缘处固定安装有四个升降杆,四个所述升降杆的伸缩端固定连接有顶板,所述驱动器的顶部设置有快速固定机构,所述顶板的底部设置有清理机构,所述顶板的底部且位于清理机构的侧面设置有检测机构。
3、所述快速固定机构包括固定安装在驱动器顶部的放置板,所述放置板的顶部中心处开设有条形槽,所述条形槽的内部中心处固定安装有隔板,所述隔板的两侧面均固定安装有电动伸缩杆,两个所述电动伸缩杆的伸缩端均固定连接有侧板。
4、本申请实施例提供了一种适用于工业机器人的检测装置,所述侧板的侧面固定连接有弹性伸缩杆,所述弹性伸缩杆的固定端外壁固定连接有固定环,所述固定环的侧面固定连接有顶杆。
5、本申请实施例提供了一种适用于工业机器人的检测装置,所述弹性伸缩杆的伸缩端固定连接有定位罩,所述定位罩的外壁等角度固定安装有多个防滑条,所述定位罩的内壁等角度固定安装有多个内撑条。
6、本申请实施例提供了一种适用于工业机器人的检测装置,所述弹性伸缩杆的活动端外壁滑动连接有活动环,所述活动环的端部固定连接有弹簧,所述弹簧的另一端与内撑条的外壁固定连接。
7、本申请实施例提供了一种适用于工业机器人的检测装置,所述清理机构包括固定安装在顶板底部的第二安装架,所述第二安装架的内壁转动连接有转轴,所述转轴的外壁设置有胶套,所述转轴的外壁开设有多个凹槽,每个所述凹槽的内壁均固定安装有气囊,所述转轴的外壁中部开设有多个弧形槽,每个所述弧形槽的内壁均固定安装有联通条,每个所述联通条的两端均与气囊的外壁嵌固连接,所述气囊的外壁与胶套的内壁相贴合。
8、本申请实施例提供了一种适用于工业机器人的检测装置,所述第二安装架的内壁且位于胶套的正上方转动连接有辅助辊,所述辅助辊的外壁与胶套的外壁转动连接。
9、本申请实施例提供了一种适用于工业机器人的检测装置,所述检测机构包括固定安装在顶板内壁上的连接杆,所述连接杆的底部固定连接有连接板,所述连接板的底部固定连接有连接条,所述连接条的底部固定连接有第一安装架,所述第一安装架的内壁转动连接有测量辊,所述第一安装架的顶部固定连接有位移检测器,所述位移检测器的顶端与连接板的底部固定连接。
10、本发明的有益效果是:
11、1、通过电动伸缩杆能对侧板的位置进行调节,便于工件的快速放置,之后电动伸缩杆与侧板之间的配合,便于向工件靠拢,使定位罩与工件之间接触,而弹性伸缩杆收缩后,顶杆对活动环进行限位,使活动环对弹簧进行压缩,便于弹簧对内撑条进行撑开,以此增大定位罩与工件之间的接触面积,同时防滑条能够避免定位罩与工件之间出现打滑,能够快速对工件进行固定。
12、2、通过胶套和转轴与输送的工件进行接触时,辅助辊对胶套内的气囊进行挤压,从而使气囊内挤压出的气体通过联通条输送到其它的气囊内部,使膨胀后的气囊对胶套进行贴合,增大胶套与工件之间的摩擦力,便于胶套对工件的表面进行清理,避免未经清理的工件表面对后续的检测造成误差。
13、3、连接杆能使连接板保持稳定,便于测量辊与工件的表面进行接触,从而在与工件进行相对运动的过程中,若工件的表面不平整,测量辊在转动的过程中会出现小幅度的上下移动,进而对位移检测器继续挤压,从而能够快速对工件表面的平整度进行检测。
技术特征:
1.一种适用于工业机器人的检测装置,包括工作台(1),所述工作台(1)的顶部中心处固定安装有导轨(2),所述导轨(2)的顶部滑动连接有驱动器(3),所述工作台(1)的顶部边缘处固定安装有四个升降杆(5),四个所述升降杆(5)的伸缩端固定连接有顶板(6),其特征在于,所述驱动器(3)的顶部设置有快速固定机构(7),所述顶板(6)的底部设置有清理机构(8),所述顶板(6)的底部且位于清理机构(8)的侧面设置有检测机构(4);
2.根据权利要求1所述的一种适用于工业机器人的检测装置,其特征在于,所述侧板(714)的侧面固定连接有弹性伸缩杆(72),所述弹性伸缩杆(72)的固定端外壁固定连接有固定环(721),所述固定环(721)的侧面固定连接有顶杆(722)。
3.根据权利要求2所述的一种适用于工业机器人的检测装置,其特征在于,所述弹性伸缩杆(72)的伸缩端固定连接有定位罩(73),所述定位罩(73)的外壁等角度固定安装有多个防滑条(732),所述定位罩(73)的内壁等角度固定安装有多个内撑条(731)。
4.根据权利要求2所述的一种适用于工业机器人的检测装置,其特征在于,所述弹性伸缩杆(72)的活动端外壁滑动连接有活动环(74),所述活动环(74)的端部固定连接有弹簧(741),所述弹簧(741)的另一端与内撑条(731)的外壁固定连接。
5.根据权利要求1所述的一种适用于工业机器人的检测装置,其特征在于,所述清理机构(8)包括固定安装在顶板(6)底部的第二安装架(81),所述第二安装架(81)的内壁转动连接有转轴(82),所述转轴(82)的外壁设置有胶套(83),所述转轴(82)的外壁开设有多个凹槽(821),每个所述凹槽(821)的内壁均固定安装有气囊(822),所述转轴(82)的外壁中部开设有多个弧形槽(823),每个所述弧形槽(823)的内壁均固定安装有联通条(824),每个所述联通条(824)的两端均与气囊(822)的外壁嵌固连接,所述气囊(822)的外壁与胶套(83)的内壁相贴合。
6.根据权利要求5所述的一种适用于工业机器人的检测装置,其特征在于,所述第二安装架(81)的内壁且位于胶套(83)的正上方转动连接有辅助辊(84),所述辅助辊(84)的外壁与胶套(83)的外壁转动连接。
7.根据权利要求1所述的一种适用于工业机器人的检测装置,其特征在于,所述检测机构(4)包括固定安装在顶板(6)内壁上的连接杆(41),所述连接杆(41)的底部固定连接有连接板(42),所述连接板(42)的底部固定连接有连接条(43),所述连接条(43)的底部固定连接有第一安装架(44),所述第一安装架(44)的内壁转动连接有测量辊(45),所述第一安装架(44)的顶部固定连接有位移检测器(46),所述位移检测器(46)的顶端与连接板(42)的底部固定连接。
技术总结
本发明公开了一种适用于工业机器人的检测装置,涉及检测设备技术领域,包括工作台,所述工作台的顶部中心处固定安装有导轨,所述导轨的顶部滑动连接有驱动器,所述工作台的顶部边缘处固定安装有四个升降杆,四个所述升降杆的伸缩端固定连接有顶板,所述驱动器的顶部设置有快速固定机构,所述顶板的底部设置有清理机构。通过电动伸缩杆能对侧板的位置进行调节,便于工件的快速放置,之后电动伸缩杆与侧板之间的配合,便于向工件靠拢,使定位罩与工件之间接触,而弹性伸缩杆收缩后,顶杆对活动环进行限位,使活动环对弹簧进行压缩,便于弹簧对内撑条进行撑开,以此增大定位罩与工件之间的接触面积,同时防滑条能够避免定位罩与工件之间出现打滑。
技术研发人员:石运伟,李国星
受保护的技术使用者:山东思创机器人科技有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!