一种无磁螺栓的被动抓取安装拆卸装置
本发明属于自动化机械装置,尤其是涉及一种无磁螺栓的被动抓取安装拆卸装置,用于精密自动化装配线上快速、准确地安装或拆卸螺栓。
背景技术:
1、在先进制造业中,螺栓的安装与拆卸是确保机械结构可靠性和维护便捷性的基础操作。尤其是在无法使用磁吸抓取方式的环境中,如在无磁环境的操作室或者电子设备制造中,螺栓的安装与拆卸成为一个技术挑战。
2、传统螺栓的安装拆卸方法通常依赖于人工手动操作或简单机械装置,这在生产效率与工作精度上均存在局限。随着自动化和精密机械的发展,对螺栓抓取与安装设备的需求日益增长。然而,现有的自动化抓取装置往往依靠磁铁或电磁力来夹持和操纵螺栓,这在需要无磁环境操作的情况下难以应用。除了可能对敏感元件造成磁性干扰外,磁性抓取机制也不能适用于非铁磁性材料制成的螺栓。这些方法在某些特殊工作环境中存在明显局限性。
3、特别是在精密仪器的组装、航空航天设备的维护或电子产品的生产过程中,铁磁性部件容易被磁化,使用可能会对敏感设备产生不利影响,如导致磁性干扰或损害磁性媒介的数据。因此,在需要避免磁性干扰的情况下,常规的螺栓和螺栓抓取装置无法满足生产需求。
4、本发明公开一种无磁螺栓的被动抓取安装拆卸装置,利用螺丝刀头与螺栓头配合定位,通过滚珠三点定位螺栓轴向,并夹紧螺栓;当螺栓受到轴向拉力(如安装螺栓,螺栓旋入螺纹孔)时,螺栓自动脱落,本发明针对高精密环境下,无磁性螺栓的安装和拆卸,在无需磁力参与的情况下,通过创新的非磁性力学机制,提供一种新型的被动抓取安装拆卸方案,从而推动自动化装配技术向更高效率、更广适应性的方向发展。
技术实现思路
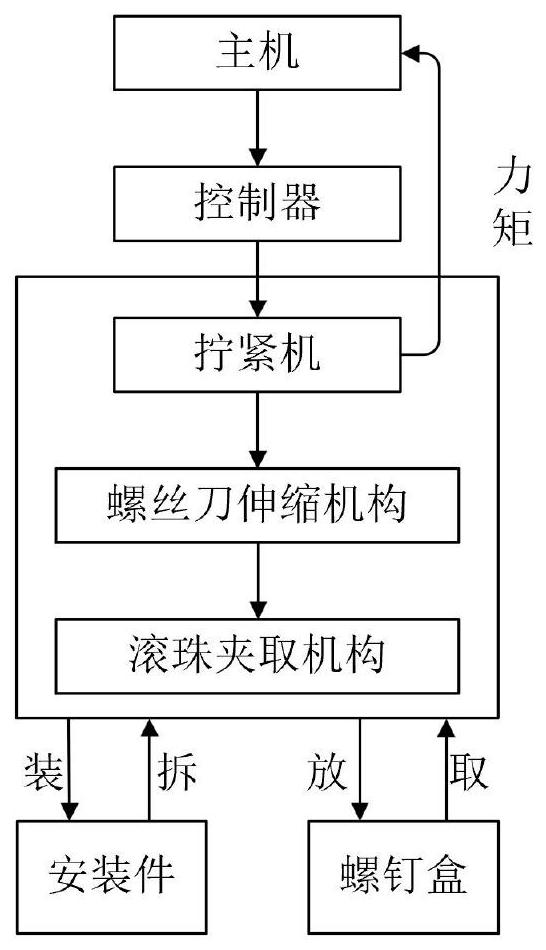
1、本发明提供了一种无磁螺栓的被动抓取安装拆卸装置,能够在无磁环境中高效、精确地执行螺栓的抓取、安装和拆卸操作。该装置主要由主机、控制器、拧紧机、螺丝刀伸缩机构、滚珠夹取机构、安装转接结构、螺钉盒等组成。
2、主机负责发送指令给控制器,并通过光纤通讯保障指令传输的稳定性和准确性。控制器接收主机的指令,对拧紧机的运动模式进行设置,这些模式涵盖了转动时间、力矩和转动的间歇性等多个参数,从而满足不同操作条件的需求。
3、拧紧机包含电机、减速器和力矩传感器,作为核心执行机构,根据控制器的指令执行相应运动。螺丝刀伸缩机构直接连接至拧紧机,并配合滚珠夹取机构实现对螺栓的稳定夹取与定位,伸缩机构中的复位弹簧确保在无外力作用下的回归初始位置。
4、滚珠夹取机构采用三点定心结构,利用弹簧与滚珠为螺栓提供所需的轴向线力,同时最小化螺栓头的摩擦力,确保在无磁环境下不会因摩擦产生磁性干扰。此外,回转弹簧保持滚珠在无外界力作用下能自动复位,并且三点夹紧结构保障了夹取螺栓时的稳定性。
5、安装转接结构引入了快速更换接口设计,能够在短时间内更换或维护夹取机构,从而降低设备维护时间,并提高生产效率。
6、与现有技术相比,本发明的特点是:
7、本发明的无磁螺栓的被动抓取安装拆卸装置可实现螺栓的安装和拆卸两项作业,且拆卸的螺栓可重复利用;本发明的无磁螺栓的被动抓取安装拆卸装置,在技术上克服了现有技术在无磁环境下操作的限制,提高了操作的自动化程度和可靠性,同时增强了装置的通用性和适应性,并在操作效率及安全性上有显著提升,尤其适用于航空航天、精密仪器等对磁场敏感的行业领域。
8、根据本发明的一些实施例,一种无磁螺栓的被动抓取安装拆卸装置,包括:主机、控制器、拧紧机、螺丝刀伸缩机构、滚珠夹取机构和螺钉盒。
9、根据本发明的一些实施例,一种无磁螺栓的被动抓取安装拆卸装置,该装置具体实现过程如下所述:
10、首先根据滚珠夹取机构工程图。安装外套筒、内套、外套、止动螺丝、压缩弹簧和锁紧滚珠。将滚珠夹取机构、螺丝刀伸缩机构和拧紧机依此连接。使用一个螺栓对齐螺丝刀,塞入机构中,调节止动螺丝,是三滚珠产生的轴向力大于螺丝刀伸缩机构弹簧压力,如此螺钉能被稳定夹取;同时三滚珠推力保持平衡,保证螺钉与螺丝刀轴线一致。然后依次将拧紧机与电源、控制器、力矩传感器连接,由,控制器与力矩传感器通过光纤通讯连接主机。最后根据螺栓安装需求,在主机软件界面设置力矩。
11、与现有技术相比,本发明特点是:
12、本发明涉及一种螺栓的自动化拆装设备,与传统的气吹或磁吸给钉器相比,该设备不仅可以实现螺栓的安装,还能实现其拆卸并可重复利用,提升了作业的灵活性。此外,该设备结合力学结构设计实现了拆装流程的一体化,具有结构紧凑的特点,并能与视觉定位系统及工业机器人相配合,使其适用于非标准化及非流水线的智能装配任务,尤其适应任意空间布局的作业场景。
13、本发明的显著优势在于给钉工具的分离设计和快速更换机制,该机制允许操作人员迅速更换螺丝刀,从而实现对不同型号螺栓的自动化安装,大幅提高了装配效率。同时,本设备的被动夹取机械结构省去了额外的运动机构,简化了安装过程,使得使用更加方便快捷。
14、此种被动夹取技术的应用,特别适合无磁性螺栓的安装需求,为在无磁或对磁敏感环境下的精密装配工作提供了理想解决方案。这项技术的研发,标志着自动化螺栓拆装技术向着更加高效、适应性强的方向发展。
技术特征:
1.一种无磁螺栓的被动抓取安装拆卸装置,其特征在于,包括以下几个部分:
2.根据权利要求1所述的一种无磁螺栓的被动抓取安装拆卸装置,其特征在于,所述控制器(2)具备传感器信号采集、处理模块,用于实时监测拧紧机(3)的运动状态和力矩输出,并根据预设参数调整拧紧机(3)的运动模式。
3.根据权利要求1所述的一种无磁螺栓的被动抓取安装拆卸装置,其特征在于,所述螺丝刀伸缩机构(4)包括复位弹簧,复位弹簧在无外界力作用下保持螺丝刀处于初始位置。
4.根据权利要求1所述的一种无磁螺栓的被动抓取安装拆卸装置,其特征在于,所述滚珠夹取机构(5)包含有滚珠和回转弹簧,滚珠保证螺栓头在被夹取时,沿螺丝刀轴线方向摩擦力最小,回转弹簧用于在无外界力作用下保持滚珠处于夹紧状态,且滚珠在夹紧螺栓头时三点定位,确保夹取稳定性。
5.根据权利要求1所述的一种无磁螺栓的被动抓取安装拆卸装置,其特征在于,所述装置进一步包括导向机构,导向机构设置于螺丝刀伸缩机构(4)和滚珠夹取机构(5)之间,用于引导螺栓头准确进入滚珠夹取机构(5)的三点定位区域,并保持螺栓头与拧紧机构保持垂直。
6.根据权利要求1或2所述的一种无磁螺栓的被动抓取安装拆卸装置,其特征在于,所述传感器信号采集、处理模块包括力矩传感器与位移传感器,位移传感器用于检测拧紧机(3)的位置移动并反馈至控制器(2),与力矩传感器协同工作以准确控制螺栓的安装与拆卸过程。
7.根据权利要求1所述的一种无磁螺栓的被动抓取安装拆卸装置,其特征在于,所述安装转接结构(6)为快速更换接口,能够实现快速替换和维修滚珠夹取机构(5)和螺丝刀伸缩机构(4),减少设备的停机时间,提高生产效率。
技术总结
本发明公开了一种针对无磁螺栓的被动夹取、安装和拆卸的装置,包括拧紧机、滚珠夹取机构、螺丝刀伸缩机构。拧紧机螺丝刀头固定初步固定螺栓位置,随着拧紧机转动,执行器内弹簧压缩,螺栓头进入滚珠夹取机构中,并被固定,实现被动拆卸夹取;逆过程为安装。本发明应用在工业机器人自动装配领域,准对无磁螺栓,在不添加额外动力系统的情况下,实现被动的螺栓夹取。
技术研发人员:王雷,喻九维,张艺,张浩泽
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!