基于压电传感的智能抓取和材质识别一体化系统及方法与流程
本公开涉及机器人技术和智能识别相关,具体地说,是涉及一种基于压电传感的智能抓取和材质识别一体化系统及方法。
背景技术:
1、本部分的陈述仅仅是提供了与本公开相关的背景技术信息,并不必然构成在先技术。
2、使用机械手抓取或操作物体是目前机器人应用中的一项常见的基本任务,传统的机械手已经能够像人手一样完成一些简单的伸张、抓取等动作,但它没有类似人手一样的触觉、压觉等多模态触觉信息,待抓取物体大多为硬质或可变形材质的物体,对于各种物体采用同等策略处理,不够智能化,且可能对待抓取物体造成一定的损坏。
3、可见,传统的机械手抓取任务针对抓取对象采用同等的抓取策略,仅能对单一某类物体进行抓取工作,无法做到针对被抓取物体自身特征来采取不同的抓取策略来保证被抓取物体不会被机械手所损伤,不适用于复杂的抓取作业场景。此外,现有技术中常见的另一种抓取策略是机械手配合机器视觉系统,首先通过摄像头拍取待抓取物图片进行图像识别,之后根据识别结果选择合适的抓取策略。不过这种方式额外增加了设备,成本和复杂度大幅增加。
技术实现思路
1、本公开为了解决上述问题,提出了一种基于压电传感的智能抓取和材质识别一体化系统及方法,通过将传感器结合在机械手上,识别机械手与物体接触时由物体本身材质所决定的各类触觉信息,能够实现机械手的抓取和感知一体化,整体结构更为简单,成本更为经济,是一种大有前景的处理策略。
2、为了实现上述目的,本公开采用如下技术方案:
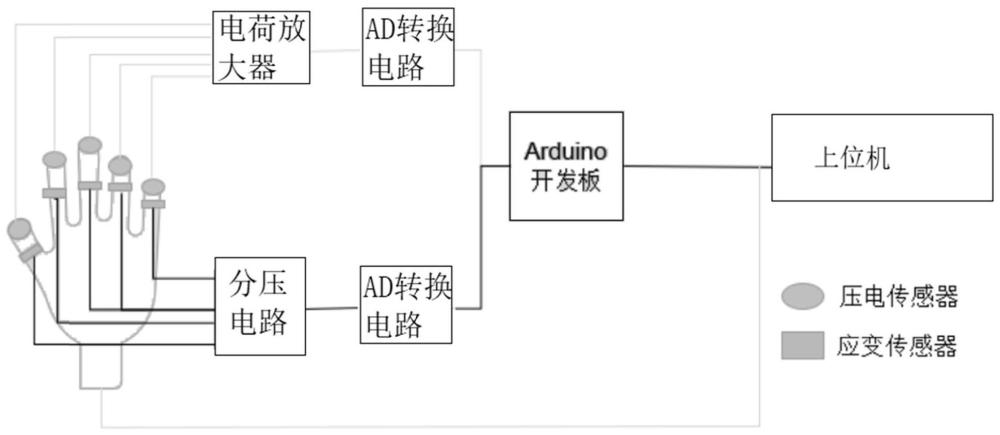
3、一个或多个实施例提供了基于压电传感的智能抓取和材质识别一体化系统,包括:机械手、压电传感器和应变传感器以及数据处理单元;压电传感器粘在机械手的指尖上,应变传感器粘在机械手的指关节处;压电传感器的压电薄膜表面采用阶梯状逐层凸起结构;
4、数据处理单元用于根据压电传感器和应变传感器的检测的数据,对抓取物进行识别,输出相应的抓取力度以对待抓取物进行抓取。
5、基于上述的基于压电传感的智能抓取和材质识别一体化系统的控制方法,包括如下步骤:
6、输出机械手的动作控制指令;
7、在机械手动作过程中,获取设置在机械手指端的压电传感器的数据,以及设置在机械手关节处的应变传感器采集的数据;
8、将获取的数据输入至训练后的神经网络模型,得到待识别物体的类别标签,基于识别的类别输出调整后的控制指令,以控制机械手的动作。
9、与现有技术相比,本公开的有益效果为:
10、本公开中,采用的压电传感器的压电薄膜,在薄膜一面上设计了阶梯状多级放大微结构,最外端的薄膜面积更小,能够识别更小的压力,使得压电传感器对小压力情景下的灵敏度大幅提高;通过将传感器结合在机械手上,利用机械手与物体接触时由物体本身材质所决定的各类触觉信息,能够实现机械手的抓取和感知一体化。
11、本公开的优点以及附加方面的优点将在下面的具体实施例中进行详细说明。
技术特征:
1.基于压电传感的智能抓取和材质识别一体化系统,其特征在于,包括:机械手、压电传感器和应变传感器以及数据处理单元;压电传感器粘在机械手的指尖上,应变传感器粘在机械手的指关节处;压电传感器的压电薄膜表面采用阶梯状逐层凸起结构;
2.如权利要求1所述的基于压电传感的智能抓取和材质识别一体化系统,其特征在于:阶梯状逐层凸起结构为从薄膜周围至中心依次凸起设定的高度,薄膜内部中空,各个位置的薄膜厚度满足设定的薄膜厚度条件。
3.如权利要求1所述的基于压电传感的智能抓取和材质识别一体化系统,其特征在于:阶梯状逐层凸起的结构的形状为类圆台形状或多边形。
4.如权利要求1所述的基于压电传感的智能抓取和材质识别一体化系统,其特征在于:压电薄膜两面设置多个阶梯状逐层凸起结构,并按照设定排列结构进行设置。
5.如权利要求1所述的基于压电传感的智能抓取和材质识别一体化系统,其特征在于:压电传感器采用两面都有阶梯状微结构的压电薄膜作为传感层,铜箔作为电极,采用pdms封装。
6.如权利要求1所述的基于压电传感的智能抓取和材质识别一体化系统,其特征在于:数据处理单元包括传感器数据采集部分及上位机;
7.基于权利要求1-6任一项所述的基于压电传感的智能抓取和材质识别一体化系统的控制方法,其特征在于,包括如下步骤:
8.如权利要求7所述的控制方法,其特征在于,神经网络模型的训练方法,包括如下步骤:
9.如权利要求7所述的控制方法,其特征在于,阶梯状逐层凸起结构的压电薄膜的制备方法,包括如下步骤:
10.如权利要求7所述的控制方法,其特征在于,数据采集的过程,包括:
技术总结
本公开涉及机器人技术和智能识别技术领域,提出了基于压电传感的智能抓取和材质识别一体化系统及方法,包括:机械手、压电传感器和应变传感器以及数据处理单元;压电传感器粘在机械手的指尖上,应变传感器粘在机械手的指关节处;压电传感器的压电薄膜表面采用阶梯状逐层凸起结构;采用的压电传感器的压电薄膜,在薄膜表面上设计了阶梯状多级放大微结构,最外端的薄膜面积更小,能够识别更小的压力,使得压电传感器对小压力情景下的灵敏度大幅提高;通过将传感器结合在机械手上,利用机械手与物体接触时由物体本身材质所决定的各类触觉信息,能够实现机械手的抓取和感知一体化。
技术研发人员:李阳,周长阳,刘建文,任秀玲,惠国政,王昊,管涛
受保护的技术使用者:三三智能科技(日照)有限公司
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!